

1.6. Нормы оценивания параметров в теории инверсных систем
Остановимся кратко на анализе центральных оценивателей и оценивателей дисперсии, используемых в теории инверсных систем.
Одномерный процесс.
Предположим, что задана нормализованная одномерная функция плотности распределения вероятности f(x). Рассмотрим выражение
 (1.47)
(1.47)
Для заданного p выберем значение т, которое доставляет минимум sp(m). Обозначим его в виде тр. Очевидно, тр можно назвать центром f(x) в смысле lр-нормы (1.47). Значение m1 есть медиана, m2 — среднее (или математическое ожидание), m - срединный размах (l - норма).
Медиана соответствует минимуму l1 нормы
![]()
![]() - минимум
- минимум
![]()
среднее значение соответствует минимуму l2 -нормы:
![]() - минимум
- минимум
![]()
при минимуме lр - нормы можно оценить т:
![]() для
для
![]()
Значение функции![]() в
стационарных точках минимума определяет
дисперсию
в
стационарных точках минимума определяет
дисперсию![]() в критериальном смысле lр
-нормы и
обозначается p:
в критериальном смысле lр
-нормы и
обозначается p:
![]() (1.48)
(1.48)
Очевидно, 1 - среднее отклонение, 2- стандартное отклонение, - половина диапазона. При этом учитываются следующие свойства:
среднее отклонение (минимум l1 - нормы):
![]()
стандартное отклонение (минимум l2-нормы):
![]()
![]()
полуразмах (минимум l -нормы):

Многомерный процесс.
В этом
случае задается функция плотности
вероятности f(x),
определяемая для вектора переменных
x
={xi}
;
![]() .
Рассматривается оператор с2(m),
определяемый с помощью элементов вектора
x:
.
Рассматривается оператор с2(m),
определяемый с помощью элементов вектора
x:
![]() (1.49)
(1.49)
Вектор m2, минимизирующий диагональные элементы оператора с2 (m), определяется как среднее (или математическое ожидание) вектора x в смысле l2 -нормы. Он вычисляется с помощью интеграла
![]()
Если m = m2, то оператор (1.49) представляет собой ковариацию вектора x в смысле l2-нормы, которую можно обозначить в виде C2:
![]() (1.50)
(1.50)
Заметим,
что диагональные элементы C2
равны дисперсиям (квадратам стандартных
отклонений), которые ранее обозначались
как
![]() :
:
![]()
Свойства ковариации (при норме l2) приведены в классической работе Пугачева B.C.:
a)
свойство симметрии -
![]()
b)
C2
является неотрицательно определенной
- для любого вектора x
![]()
c) если
C2
положительно определена, то для любого
вектора x
величина
![]() имеет
свойства нормы. Она определяется как
весовая l2
-норма
вектора x;
имеет
свойства нормы. Она определяется как
весовая l2
-норма
вектора x;
d)
корреляционные коэффициенты
![]() определяемые по формуле
определяемые по формуле
 ,
обладают следующим важным свойством -
,
обладают следующим важным свойством -
![]() ;
;
e) плотность вероятности

где N - размерность вектора x, нормализуется со средним значением х0 и ковариационным оператором с2 [39].
Среди всех плотностей вероятностей с заданной нормой l2 оператора ковариации, функция Гаусса соответствует минимуму информации (т.е. функция имеет максимум при минимуме показателя степени экспоненты).
Остановимся теперь на обобщении процесса с нормальным распределением. Среди всех нормированных плотностей вероятности по норме lр оцениватель дисперсии
![]()
единственный удовлетворяет условию минимума информации. Эта плотность представляется уравнением
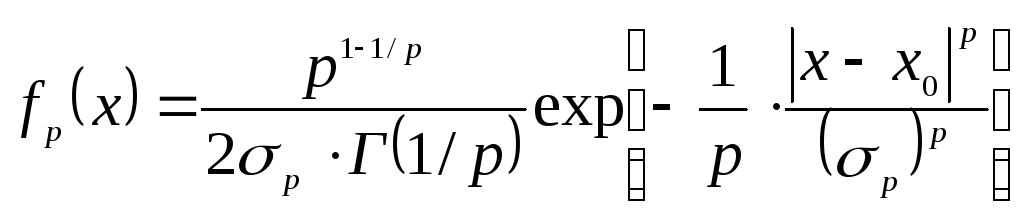 (1.51)
(1.51)
где Г() есть гамма-функция [42].
Задаваясь различными значениями p, можно построить обобщенную характеристику, изменяющую форму в зависимости от нормы. B частности, если p = 1
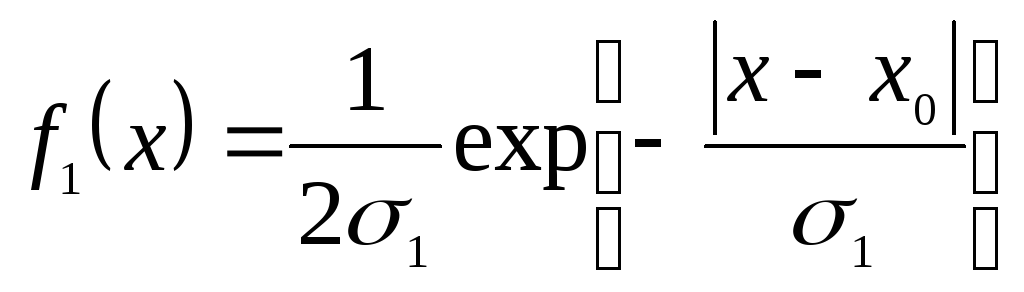
и
![]() - симметричная экспонента, центрированная
при
- симметричная экспонента, центрированная
при
![]() со средним отклонением 1.
Для р
= 2
со средним отклонением 1.
Для р
= 2
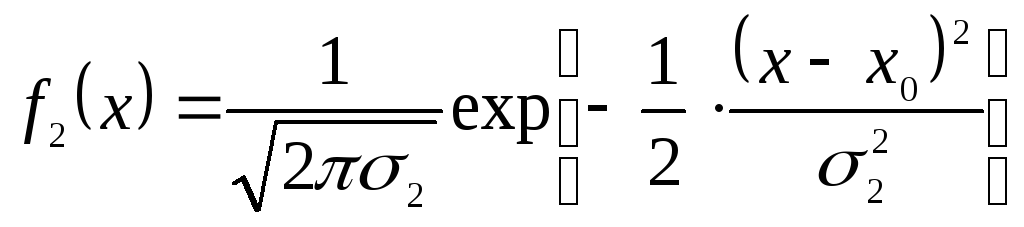
есть функция Гаусса со стандартным отклонением 2. Для p =

Функция
![]() имеет
прямоугольную форму, центрированную
имеет
прямоугольную форму, центрированную
![]() при
с размахом, равным .
Функция
при
с размахом, равным .
Функция
![]() нормирована
к единице.
нормирована
к единице.
Функцию (1.51) называют также обобщенным гауссианом, т.к. она генерирует семейство функций, содержащих в своем составе функцию Гаусса. Отметим, что приведенные выше функции часто используются для моделирования распределений ошибок. Введение обобщенного гауссиана способствует некоторому расширению возможности выбора распределений для оценки погрешностей сигналов в измерительных средствах судовых энергетических комплексов.
Большое практическое применение получили оцениватели по норме p= 1. Для такой оценки мы предлагаем эффективный алгоритм, основанный на выборе минимальных составляющих вектора погрешностей, полученных на начальной стадии решения с помощью изложенного выше метода наименьших квадратов.
Если
в критерии (1.47) предположить симметрию
![]() относительно
тр
и
перейти от интеграла к дискретным
оценкам,
приняв
за основу уравнение измерителя в форме
(1.49),
то критерий качества примет следующий
вид:
относительно
тр
и
перейти от интеграла к дискретным
оценкам,
приняв
за основу уравнение измерителя в форме
(1.49),
то критерий качества примет следующий
вид:
![]() (1.52)
(1.52)
где p
1. Если р
=
2, то J2
(х)
естъ корень квадратный из суммы квадратов
остатков, так что минимизация J2
(x)
эквивалентна
наилучшей оценке
![]() по
методу наименьших квадратов.
по
методу наименьших квадратов.
Статистические свойства средней амплитудной и среднеквадратической оценок можно интерпретировать следующим образом. Среднеквадратическая оценка соответствует определению среднего квадрата множества измерений, в то время как оценка по критерию L1 - нахождению среднего значения множества измерений. Использование среднего значения в процедуре оценивания состоит в нахождении n (число переменных состояния) остатков, равных нулю, и (m – n) ненулевых остатков (т — число измерений). При этом предполагается, что, в общем, каждое измерение может подвергаться воздействию шума Гаусса. Использование весовых факторов изменяет дисперсию шума измерений, так что в целом система измерений может рассматриваться как имеющая шумовую составляющую, представляемую распределением Гаусса со смешанной дисперсией. Для распределений Гаусса со смешанными дисперсиями, а также для негауссовских распределений среднее амплитудное оценивание дает хорошие практические результаты. Это утверждение основывается на целом ряде работ, где проблема минимизации линейного критерия качества решалась с помощью симплекс-метода, являющегося основным методом поиска оптимума в линейном программировании [19].