

-
1.4. Рекуррентный метод оценивания параметров моделей
Важным свойством (1.15) является возможность значительного упрощения вычислительной процедуры путем использования рекуррентной схемы, исключающей необходимость инверсии гауссовской нормальной матрицы полной размерности.
Возвращаясь вновь к модели измерителя (1.11), запишем матричное уравнение, соответствующее т измерениям, с индексами (m)
![]() (1.28)
(1.28)
Так как учет результата каждого последующего измерения связан с изменением числа строк матрицы H и размерности векторов у и v, то, вообще говоря, оценка может производиться с помощью (1.15). Если при этом воспользоваться методом наименьших квадратов со взвешиванием измерений, то критерий качества
![]() (1.29)
(1.29)
содержащий ковариационную матрицу, принимает минимальное значение, если оценка x выполняется путем решения матричного уравнения
![]() (1.30)
(1.30)
Индекс
![]() означает,
что оценка
означает,
что оценка
![]() размерности
(nх1)
производится
размерности
(nх1)
производится
по т измерениям (априорное оценивание).
Предположим, что выполнено (m+1) - oe измерение ут+1, Нm+1 и vm+1 . Тогда новое измерение, согласно (1.28), можно представить с помощью уравнения
![]() (1.31)
(1.31)
Присоединим (1.31) к системе (1.28) с помощью блоков
 (1.32)
(1.32)
Новая апостериорная оценка состояния должна производиться по числу измерений, использованных в (1.32):
![]() (1.33)
(1.33)
Размерность вектора оцениваемых параметров (переменных состояния) с добавлением новых измерений не изменяется. Однако численные значения его элементов зависят от присоединенных данных. Тот факт, что добавление каждого нового результата измерений требует повторного выполнения всех операций, определенных (1.33), свидетельствует о возрастании объема вычислений с увеличением размерности матрицы H. Вместе с тем, объем рутинных вычислений можно значительно уменьшить, если новые измерения учитывать как поправки, вносимые в значения уже имеющихся оценок. При этом исключается необходимость операций над матрицами высокой размерности; соответственно, повышается эффективность вычислительных алгоритмов и машинных программ, используемых в
процессе
управления технологическими комплексами.
Для получения эффекта взвешивания
измерений с помощью элементов
ковариационной матрицы необходимо
![]() разделить на блоки соответствующих
размерностей
разделить на блоки соответствующих
размерностей
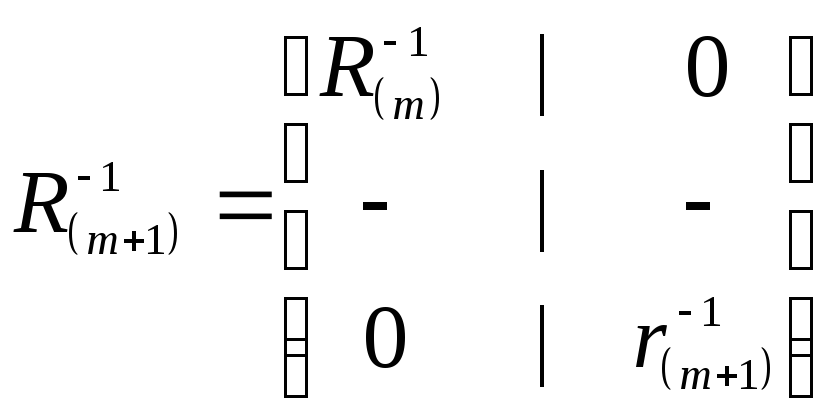 (1.34)
(1.34)
т.е., согласно (1.34) не производится взвешивания произведения ошибок на первых т и последующих измерениях. Взамен же получаются эффективные вычислительные алгоритмы, уменьшающие объем вычислений, выполняемых в процедурах оценивания, на несколько порядков.
Используя существующие методы преобразования блочных матриц, можно преобразовать информационную матрицу, входящую в уравнение (1.33), к следующему виду [27]:
 (1.35)
(1.35)
![]()
Введем обозначения:
![]() и
и
![]()
тогда уравнение (1.35) можно записать
![]()
а инверсия
![]() (1.36)
(1.36)
Применив к (1.36) лемму об обращении матриц, содержащуюся в работе [9], получим рекуррентную формулу
![]() (1.37)
(1.37)
Если
вектор измерений ут+
1
в
уравнении (1.4-4) вырождается в скалярную
величину, то матрица
![]() также будет скалярной величиной, и,
следовательно, ее обращение не представляет
труда.
также будет скалярной величиной, и,
следовательно, ее обращение не представляет
труда.
Если,
например,
![]() и
и
![]() ,
то (1.37) принимает вид
,
то (1.37) принимает вид
![]() (1.38)
(1.38)
Получен очень полезный результат, поскольку для нахождения новой оценки нет необходимости в инвертировании матрицы большой размерности с присоединением новых измерений. Новая оценка состоит из оценки на предыдущем шаге, с которой суммируется поправочный коэффициент, полученный по измерениям ym+ 1 , и Mm :
![]() (1.39)
(1.39)
Возвращаясь
к разности между оценочным и истинным
значениями параметров
![]() и переходя к осредненным оценкам, можно
определить ковариационную матрицу
с помощью формулы
и переходя к осредненным оценкам, можно
определить ковариационную матрицу
с помощью формулы
![]() (1.40)
(1.40)
Используя
(1.40), мы также можем получить рекуррентное
соотношение, подобное (1.38) для
![]() :
:
![]() (1.41)
(1.41)
Нетрудно
заметить, что ковариационная матрица
![]() согласно(1.41),
с увеличением т
всегда
уменьшается и в пределе стремится к
нулю.
Следовательно,
оценка
согласно(1.41),
с увеличением т
всегда
уменьшается и в пределе стремится к
нулю.
Следовательно,
оценка
![]() является
не только несмещенной, но и состоятельной
- это является исключительно важным
свойством метода наименьших квадратов.
является
не только несмещенной, но и состоятельной
- это является исключительно важным
свойством метода наименьших квадратов.
Рекуррентное оценивание начинается с заданных значений x0 и M0. Если они не заданы, а имеется в наличии система из n уравнений, следует получить Mn , хn , а затем с помощью (1.30) выполнить последующие оценки.
Для получения рекуррентного алгоритма в общем случае (для вектора ym+1) введем обозначение части второго слагаемого (1.37):
![]()
Поскольку уравнение (1.33) можно записать в виде
![]()
то, подставляя в него выражение (1.37), можно записать
![]()
Обращаясь вновь к специально выбранной форме ковариационной матрицы (1.33), с учетом того, что произведение
![]()
можно
получить оценку
![]() в виде
в виде
![]()
Это
выражение, представляющее собой
рекурсивный оцениватель, получено с
учетом того, что если в предшествующей
формуле первое слагаемое в правой
части умножить на Мm,
оно будет представлять оценку![]() (без учета новых данных).
(без учета новых данных).
Необходимо
отметить, что каждое последующее значение
оценки следует производить по предыдущей
с добавлением поправки, зависящей от
размерности у(m+1)
и
ожидаемого значения
![]()
"Работу" рекурсивного оценивателя продемонстрируем на следующем примере.
Предположим, что требуется оценить коэффициенты модели
![]()
по следующим экспериментальным данным в пяти точках на плоскости (x,y):
(0, l); (l, 2); (2, 4); (4, 5); (5, 6).
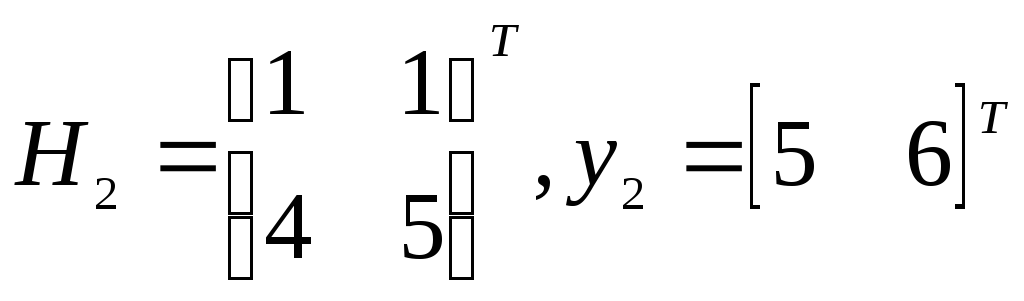
Сформируем матрицу H и вектор у:

Будем считать, что требуется рекурсивно оценить коэффициенты а и b по следующим данным:
на первом шаге

на втором шаге
Решение
выполним для  и
и
Для
оценки
![]() используем операцию левого деления
используем операцию левого деления
Затем определим M1:

Для расчета M2 по формуле (1.4-10) предварительно найдем матрицу D

Используя D, получим

Оценка
коэффициентов а
и b
на
втором шаге, согласно уравнению
рекурсивного оценивателя, будет состоять
из оценки x1
и дополнительной составляющей,
определяющей "вклад" экспериментальных
данных на втором шаге. Поскольку
![]() ,
для оценки используем выражение
,
для оценки используем выражение

Для
вычислений мы предлагаем фрагмент
программы, содержащий исходные данные,
из которых путем "вырезки" из
матрицы H
получены H1,
H2,
y1
и у2.
По приведенным выше соотношениям
рассчитаны M1,
D,
М2
и
получены
![]() и
и
![]() .
.
Рекуррентньм метод оценивания параметров
y = [l 2 4 5 6]';H = [0 1 2 4 5; 1 1 1 1 1]’;
Hl = H (l:3,: );
H2 = H (4:5,: );
yl = y (l:3);
y2 = y (4:5);
Ml = inv (Hl' *Hl);
D = inv ([l 0; 0 l]+Hl*Ml*H2');
M2 = Ml-Ml*H2'*D*H2*Ml;
Вычисление оценок:
xl = Hl\yl;
x2 = xl+M2*H2'*(y2-H2*xl)
Проверка решения выполнена путем использования прямой оценки по формуле
Этот
результат эквивалентен
![]() .
.
Таким образом, модель имеет вид
![]()