

4.3. Приведение к резистивной форме моделей электрических цепей с одним накопителем энергии
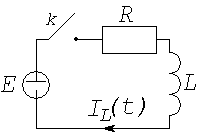
Рассмотрим электрическую цепь, изображенную на (рис. 4.2).
В
момент коммутации (при замыкании ключа
«k»),
согласно первому закону коммутации,
ток в цепи мгновенно изменяться не
может. Поэтому в
момент t=0+
ток в цепи
![]() ,
и напряжение источника уравновешивается
напряжением на индуктивности.
,
и напряжение источника уравновешивается
напряжением на индуктивности.
Согласно правилам, изложенным в предыдущем параграфе, заменим индуктивность источником тока.
а) б)


в) г)
Рис. 4.2. RL – цепь и ее резистивная форма
Обозначим
этот ток
![]() (рис. 4.2 б). Цепь содержит один накопитель
энергии (индуктивность) и один источник
ЭДС (внутреннее сопротивление источника
ЭДС равно нулю). Поэтому, согласно (4.10),
динамическая модель цепи может быть
представлена уравнением [23]:
(рис. 4.2 б). Цепь содержит один накопитель
энергии (индуктивность) и один источник
ЭДС (внутреннее сопротивление источника
ЭДС равно нулю). Поэтому, согласно (4.10),
динамическая модель цепи может быть
представлена уравнением [23]:
![]() (4.13)
(4.13)
Заметим, что эта модель справедлива также для любой разветвленной цепи, содержащей только одну индуктивность и один источник электроэнергии (например, источник тока). Однако выражения для коэффициентов а и b будут отличаться, поскольку они определяются топологией конкретной цепи.
Цепь,
изображенная на (рис. 4.2 б), приемлема
только для момента t
=
0+
при условии, что
![]() изменяется скачком. Она не содержит
инерционных элементов. Поэтому (1.3-1)
можно заменить алгебраическим уравнением:
изменяется скачком. Она не содержит
инерционных элементов. Поэтому (1.3-1)
можно заменить алгебраическим уравнением:
![]() (4.14)
(4.14)
Постоянный
коэффициент а
в
уравнении (4.14) определяет приращение
напряжения на индуктивности при
изменении (скачком) тока
![]() ,
а
коэффициент b
- приращение
напряжения на индуктивности при изменении
ЭДС источника на величину
,
а
коэффициент b
- приращение
напряжения на индуктивности при изменении
ЭДС источника на величину![]() .
.
Используя принцип суперпозиции (наложения), мы можем искусственно вводить лишь приращение одной переменной, а вторую при этом «замораживать». Например,
![]() ,
(4.15)
,
(4.15)
![]() .
(4.16)
.
(4.16)
Для
удобства определения неизвестных
коэффициентов приращения переменных
можно принять равными единице. Если
увеличение тока
![]() на одну единицу (например, на 1 Ампер)
будет приводить к уменьшению напряжения
на индуктивности на величину
на одну единицу (например, на 1 Ампер)
будет приводить к уменьшению напряжения
на индуктивности на величину
![]() ,
то
коэффициент а
должен
приниматься со знаком «минус», а если
к увеличению - со знаком «плюс».
Аналогично определяется знак коэффициента
b.
,
то
коэффициент а
должен
приниматься со знаком «минус», а если
к увеличению - со знаком «плюс».
Аналогично определяется знак коэффициента
b.
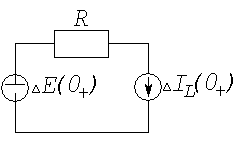
Согласно
(4.15),
![]() «заморожено».
Поэтому
в резистивной форме цепи (рис.4.2 в)
источник ЭДС отсутствует, однако
сохранено его внутреннее сопротивление,
равное нулю. Если в момент t
= 0+
с
помощью
источника тока генерировать скачком
ток
«заморожено».
Поэтому
в резистивной форме цепи (рис.4.2 в)
источник ЭДС отсутствует, однако
сохранено его внутреннее сопротивление,
равное нулю. Если в момент t
= 0+
с
помощью
источника тока генерировать скачком
ток![]() ,
это
вызовет падение напряжения на
сопротивлении R,
равное
,
это
вызовет падение напряжения на
сопротивлении R,
равное
![]() .
С учетом принятых на схеме знаков,
напряжение на источнике тока уменьшится
на величину
.
С учетом принятых на схеме знаков,
напряжение на источнике тока уменьшится
на величину
![]() .
Следовательно, коэффициент а
по
модулю равен
.
Следовательно, коэффициент а
по
модулю равен
![]() ,
а
с учетом
знака
приращения напряжения, он должен быть
принят со знаком «-», то есть а
=
- R.
,
а
с учетом
знака
приращения напряжения, он должен быть
принят со знаком «-», то есть а
=
- R.
Теперь остановимся на уравнении (4.16). В момент времени t = 0+ ему соответствует резистивная цепь, приведенная на рис.4.2 г). Источник тока из цепи исключен, а его внутреннее сопротивление, равное бесконечности, оставлено.
Заметим,
что при изменении скачком (на 1 вольт)
напряжения
![]() ,
оно будет полностью приложено к источнику
тока (ток в цепи отсутствует). С учетом
знаков сигналов, напряжение на источнике
тока возрастет до значения
,
оно будет полностью приложено к источнику
тока (ток в цепи отсутствует). С учетом
знаков сигналов, напряжение на источнике
тока возрастет до значения
![]() .
Следовательно, коэффициент b
=
1.
.
Следовательно, коэффициент b
=
1.
Дифференциальное уравнение (4.13), в отличие от алгебраического, позволяет описать процесс в любой момент времени 0+ t < , в том числе - в момент t = 0+. Поэтому полученные коэффициенты могут быть перенесены в (4.13). Тогда будем иметь:
![]() (4.17)
(4.17)
Запись (4.17) в форме Коши:
![]() (4.18)
(4.18)
показывает, что матрицы А и В модели (4.4) вырождаются в элементы
![]()
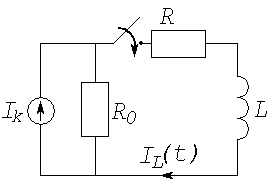
Рассмотрим цепь, содержащую одну индуктивность и источник тока (рис.4.3 а). Ее резистивная схема представлена на (рис. 4.3 б).
Модель цепи (рис.4.2) сохраняется, с учетом того, что источником электроэнергии является источник тока
![]() (4.19)
(4.19)
а)
 б)
б)
Рис.4.3. RL – цепь с источником тока и ее резистивная форма.
Для резистивной цепи (рис. 4.3 б) справедливо алгебраическое уравнение
![]() (4.20)
(4.20)
Генерируя
![]() при
при
![]() ,
мы получим:
,
мы получим:
![]() и
аналогично будем иметь
и
аналогично будем иметь
![]() .
.
Таким образом, динамическая модель цепи, определяемая (4.19), представляется дифференциальным уравнением
![]()
или в форме Коши:
![]() (4.21)
(4.21)
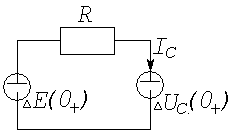
На рис. (4.4 а) приведена RC-цепь, подключаемая к источнику постоянной ЭДС. Возвращаясь к (4.10), мы видим, что при наличии одного накопителя энергии (емкости) и одного источника, независимо от числа и схемы соединений активных сопротивлений, модель цепи должна иметь вид:
![]() (4.22)
(4.22)

а) б)
в) г)
Рис. 4.4. RC – цепь и ее резистивная форма.
Для
получения значений а
и
b
необходимо,
согласно правилам, определить
резистивную форму цепи. С этой целью
выберем направление тока IC
,
генерируемого
источником, и заменим емкость источником
ЭДС. Направление ЭДС этого источника
должно быть встречным току IС.
Использование
источника ЭДС вместо емкости в момент
замыкания ключа t
=0+
обосновывается тем, что напряжение на
емкости, согласно второму закону
коммутации, не может изменяться скачком.
В момент замыкания ключа k
в
цепи устанавливается максимальный ток
![]() (при условии, если
(при условии, если
![]() ).
).
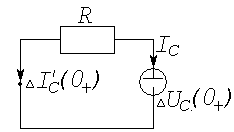
Резистивная форма RС-цепи приведена на рис. (4.4 б). Левая часть (4.22) имеет размерность тока. Поэтому, переходя от дифференциального уравнения к алгебраическому, для резистивной цепи (рис. 4.4 б) мы получим:
![]() (4.23)
(4.23)
Для определения коэффициентов а и b будем поочередно варьировать одну из двух переменных, оставляя другую без изменения. Предположим, что
![]() .
.
Коэффициент
а
определяет,
во сколько раз изменится ток через
емкость![]() ,
если напряжение на емкости изменится
на одну единицу (например, 1 Вольт). Знак
коэффициента будем принимать отрицательным,
если под действием напряжения
,
если напряжение на емкости изменится
на одну единицу (например, 1 Вольт). Знак
коэффициента будем принимать отрицательным,
если под действием напряжения
![]() будет генерироваться ток, направленный
встречно току IС
.
будет генерироваться ток, направленный
встречно току IС
.
При совпадении направлений генерируемого тока через емкость и тока IC соответствующий коэффициент будем записывать со знаком «+».
Согласно обозначениям, используемым на рис. (4.4 в), приращение тока по модулю равно:
![]()
Так
как направление тока является встречным
относительно IС
,
знак
коэффициента
должен быть «-», то есть
![]() .
.
Рассмотрим
цепь, представленную на рис. (4.4 г), где
источник ЭДС
![]() исключен, но в цепи содержится его
внутреннее сопротивление, равное нулю.
Под действием
исключен, но в цепи содержится его
внутреннее сопротивление, равное нулю.
Под действием
![]() в цепи возникает ток
в цепи возникает ток
![]() .
.
Поскольку этот
ток совпадает по направлению с током
IС
, знак
коэффициента b,
устанавливающего
соотношение между
![]() и
и
![]() ,
должен быть «+», то есть:
,
должен быть «+», то есть:
![]() .
.
Коэффициент
![]() .
.
Динамическая модель цепи (1.3-10) принимает вид:
![]() ,
,
и для переменной состояния UС (t) мы получаем стандартную форму записи:
![]() (4.24)
(4.24)