

5.3.Матричная форма решения уравнений состояния динамических систем
Рассмотрим модель системы, описываемую матричным уравнением:
![]() ,
,
![]() (5.0)
(5.0)
Запишем матричную
экспоненту в виде
![]() ,
а также воспользуемся ее инверсией
,
а также воспользуемся ее инверсией
![]() .
Заметим, что
.
Заметим, что
![]() – единичная матрица. Так как:
– единичная матрица. Так как:
 ,
то (5.17) можно записать:
,
то (5.17) можно записать:
 , (5.0)
, (5.0)
где
![]() – постоянная интегрирования. Умножим
(5.18) слева на матричную экспоненту. Тогда
– постоянная интегрирования. Умножим
(5.18) слева на матричную экспоненту. Тогда
 .
.
При
![]() значение интеграла равно нулю и,
следовательно,
значение интеграла равно нулю и,
следовательно,
![]() .
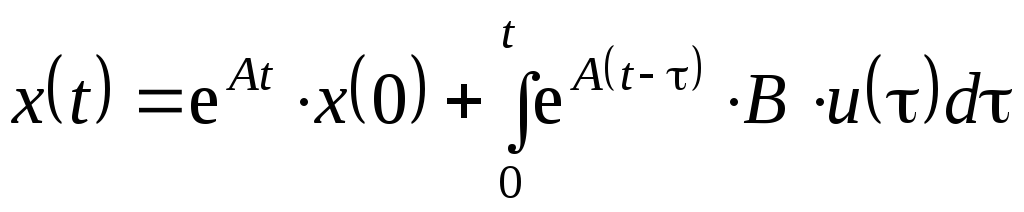
Вектор состояния
.
Вектор состояния
 (5.0)
(5.0)
Матричную форму записи (5.19) мы будем неоднократно использовать в дальнейшем. Поэтому остановимся на рассмотрении некоторых деталей.
Если на систему не оказывается никаких внешних воздействий, то есть в любой момент времени вектор управления равен нулю, то интеграл также равен нулю. Тогда решение (5.19) вырождается и имеет вид:
![]() (5.0)
(5.0)
Очевидно, переходный
процесс в системе (5.20) может наблюдаться
только в том случае, если хотя бы один
из элементов вектора
![]() не равен нулю. Физическая интерпретация
этого условия состоит в наличии запасов
энергии в системе (кинетической и
потенциальной) в момент
не равен нулю. Физическая интерпретация
этого условия состоит в наличии запасов
энергии в системе (кинетической и
потенциальной) в момент
![]() .
Если
.
Если
![]() является матрицей Гурвица, то есть ее
собственные значения содержат вещественные
отрицательные части чисел, то вектор
является матрицей Гурвица, то есть ее
собственные значения содержат вещественные
отрицательные части чисел, то вектор
![]() при
при
![]() стремится к нулю. Иначе говоря, по
окончании переходного процесса система
переходит из начального состояния
стремится к нулю. Иначе говоря, по
окончании переходного процесса система
переходит из начального состояния
![]() в начало координат
в начало координат
![]() .
.
В приложении к
электрическим цепям
![]() означает наличие напряжений на емкостях
и токов через индуктивности в момент
означает наличие напряжений на емкостях
и токов через индуктивности в момент
![]() ,
которые, в свою очередь, характеризуют
энергию электрического поля конденсаторов
и магнитного поля индуктивных катушек.
Второе слагаемое в (5.19), выраженное
интегралом, характеризует влияние на
поведение системы внешних воздействий
в форме вектора управления
,
которые, в свою очередь, характеризуют
энергию электрического поля конденсаторов
и магнитного поля индуктивных катушек.
Второе слагаемое в (5.19), выраженное
интегралом, характеризует влияние на
поведение системы внешних воздействий
в форме вектора управления
![]() ,
не равного нулю. Необходимо отметить,
что интегрирование ведется только по
переменной
,
не равного нулю. Необходимо отметить,
что интегрирование ведется только по
переменной
![]() .
.
Особый интерес
представляет режим, соответствующий
![]() .
Например, если электрическая цепь
подключается к источникам постоянных
ЭДС и токов, то, как было показано в главе
4, вектор
.
Например, если электрическая цепь
подключается к источникам постоянных
ЭДС и токов, то, как было показано в главе
4, вектор
![]() (в механических системах аналогичные
режимы наблюдаются тогда, когда на
систему воздействуют постоянные силы).
(в механических системах аналогичные
режимы наблюдаются тогда, когда на
систему воздействуют постоянные силы).
Уравнение (5.19) можно привести к виду:
![]() (5.0)
(5.0)
Уравнение (5.21)
целесообразно использовать для расчета
переходных процессов, поскольку в
алфавите MatLAB содержится
матричная экспоненциальная функция
![]() .
С помощью MatLAB можно также
получить функцию обращения матрицы
.
С помощью MatLAB можно также
получить функцию обращения матрицы
![]() ,
функцию формирования единичной матрицы
требуемой размерности
,
функцию формирования единичной матрицы
требуемой размерности
![]() ,
возвращающую квадратную единичную
матрицу размерности
,
возвращающую квадратную единичную
матрицу размерности
![]() .
Иначе говоря, уравнение (5.21) решается
без интегрирования дифференциальных
уравнений, но только в тех случаях, когда
.
Иначе говоря, уравнение (5.21) решается
без интегрирования дифференциальных
уравнений, но только в тех случаях, когда
![]() является неособенной матрицей. Последнее
ограничение является существенным.
является неособенной матрицей. Последнее
ограничение является существенным.
-
Моделирование динамических систем с двумя накопителями энергии при параметрических возмущениях Для определенности рассмотрим модель динамической системы с двумя накопителями энергии:
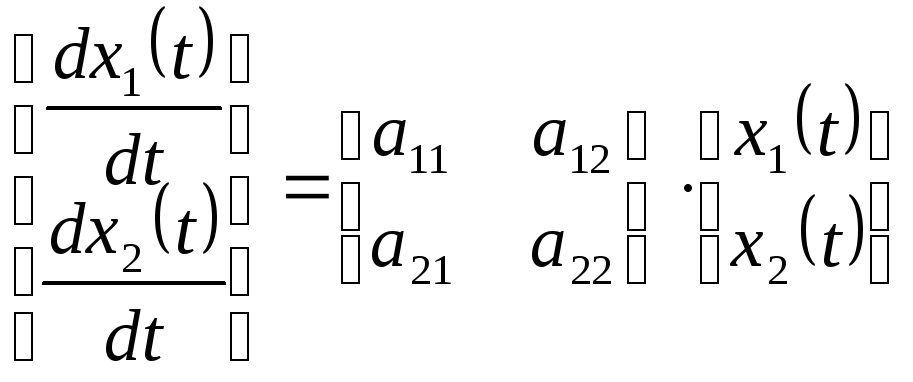 ,
при
,
при
![]() .
.
Динамические
свойства системы определяются собственными
значениями матрицы
![]() .
Модели для различных собственных
значений мы можем получить путем
возмущения параметра
.
Модели для различных собственных
значений мы можем получить путем
возмущения параметра
![]() .
Выберем
.
Выберем
![]() ,
,
![]() ,
,
![]() и сохраним их на всех режимах постоянными.
В таблице 5.1 приведены собственные
значения матрицы A,
изменяемые в диапазоне – от чисто мнимых
до вещественных отрицательных и неравных
собственных чисел - путем вариации
и сохраним их на всех режимах постоянными.
В таблице 5.1 приведены собственные
значения матрицы A,
изменяемые в диапазоне – от чисто мнимых
до вещественных отрицательных и неравных
собственных чисел - путем вариации
![]() .
.
Таблица 5.1
|
№ режима |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Режим №1 моделируется при чисто мнимых корнях. Режимы 26 характеризуются тем, что корни являются комплексно-сопряженными с отрицательными вещественными частями. Режим №7 соответствует кратным корням. Наконец, режим №8 моделируется при вещественных отрицательных и неравных корнях.
Моделирование
произведем на всех режимах при ненулевых
начальных условиях. Пусть вектор
![]() .
Основная программа для моделирования
восьми режимов представлена файлом
.
Основная программа для моделирования
восьми режимов представлена файлом
![]() ,
а вспомогательная – файлом
,
а вспомогательная – файлом
![]()
Файл
![]()
%Investigation of the second-order electric circuits.
%The main file "mmm13.m" and the complementary file "sah35.m".
Echo off
clc
t0=0;
tfinal=40;
y0=[2.5 12.5]';
%[t, y]=ode23('sah35', t0, tfinal, y0);
tol=1.e-3; %Accuracy
trace=-2.2;
[t, y]=ode23('sah35', t0, tfinal, y0, tol, trace);
subplot(223)
plot(t, y), title('Circuits time history'), grid,
pause,
subplot(224)
plot(y(:,1), y(:,2)), title('Phase plane plot'),
grid,
pause
Файл
![]()
%File "sah35.m".
%The behavior of dynamical system (electrical circuit) model.
%Two energy capacitance.
function yprime=sah35(t, y);
%This program is auxiliary and implemented with the
%main program (file "mmm13.m").
%Matrix coefficients: a11=0, a12=1, a21=-1, a22=-2.5
yprime=[0 1; -1 -2.5]*[y(1) y(2)]'+[1 0]'*4*0;
Содержание основной
программы в целом повторяет ранее
описанную программу (файл
![]() ).
Здесь также используется внешний файл
).
Здесь также используется внешний файл
![]() .
Отличие состоит только во введении
операторов смены графических окон
.
Отличие состоит только во введении
операторов смены графических окон
![]() и
и
![]() ,
которые позволяют вывести соответствующие
кривые на экран в малые графические
окна, составляющие по размерам ј экрана.
В частности,
,
которые позволяют вывести соответствующие
кривые на экран в малые графические
окна, составляющие по размерам ј экрана.
В частности,
![]() и
и
![]() размещают два окна в верхней половине
экрана, а первоначально приведенные
размещают два окна в верхней половине
экрана, а первоначально приведенные
![]() и
и
![]() размещают графики в двух окнах,
расположенных в нижней половине экрана
дисплея.
размещают графики в двух окнах,
расположенных в нижней половине экрана
дисплея.
Вспомогательный
файл
![]() ,
содержащий функцию, представленную в
виде матричного уравнения (5.17), за счет
принятого равным нулю вектора управления
(последняя строка программы) позволяет
решать дифференциальное уравнение
,
содержащий функцию, представленную в
виде матричного уравнения (5.17), за счет
принятого равным нулю вектора управления
(последняя строка программы) позволяет
решать дифференциальное уравнение

при
заданном
![]() ,
где
,
где
![]() на каждом режиме принимает значения,
приведенные во втором столбце таблицы
5.1.
на каждом режиме принимает значения,
приведенные во втором столбце таблицы
5.1.
Результаты моделирования представлены на рисунках (5.35.10)



Для каждого режима приведены временные характеристики и фазовый портрет. Видно, что при чисто мнимых корнях (режим №1) энергия в системе не рассеивается, и колебания переменных состояния являются гармоническими (с неизменной амплитудой). На фазовой плоскости этому режиму соответствует замкнутая кривая.
Режимы 26
при соответствующих комплексно-сопряженных
корнях (см. таблицу 5.1) представляют
собой затухающие колебания. Чем больше
по абсолютному значению коэффициент
![]() ,
то есть
,
то есть
![]() ,
тем быстрее затухают периодические
колебания и тем меньше собственная
частота. В режиме №8 процесс становится
апериодическим (модель апериодического
звена второго порядка, рис. 5.10). Коэффициент
,
тем быстрее затухают периодические
колебания и тем меньше собственная
частота. В режиме №8 процесс становится
апериодическим (модель апериодического
звена второго порядка, рис. 5.10). Коэффициент
![]() характеризует скорость рассеяния
энергии в системе. Чем он больше (по
модулю), тем быстрее затухает переходный
процесс.
характеризует скорость рассеяния
энергии в системе. Чем он больше (по
модулю), тем быстрее затухает переходный
процесс.