1.7. Оценивание параметров по критерию минимума среднего абсолютного значения остатков
Выбрав р = 1, мы имеем оценку среднего абсолютного значения остатков. B отличие от метода наименьших квадратов, где для минимума критерия качества получено математическое выражение путем взятия производной и приравнивания ее нулю, минимизация средней абсолютной оценки таким способом невозможна, так как J1(x) не может быть дифференцирована для всех значений x. Поэтому для поиска минимума J1(x) мoгyт быть использованы определенные формы решения задач линейного программирования, базирующиеся на интерполяционном процессе по группе точек, в которых произведены измерения.
Обобщенная линейная задача аппроксимации по критерию минимума среднего абсолютного значения остатков может быть сформулирована следующим образом. По заданным измерениям yi, i = 1,..., m, требуется оценить n-мерный вектор x, при котором выполняются условия
![]() (1.53)
(1.53)
и x доставляет минимум критерию качества
![]() (1.54)
(1.54)
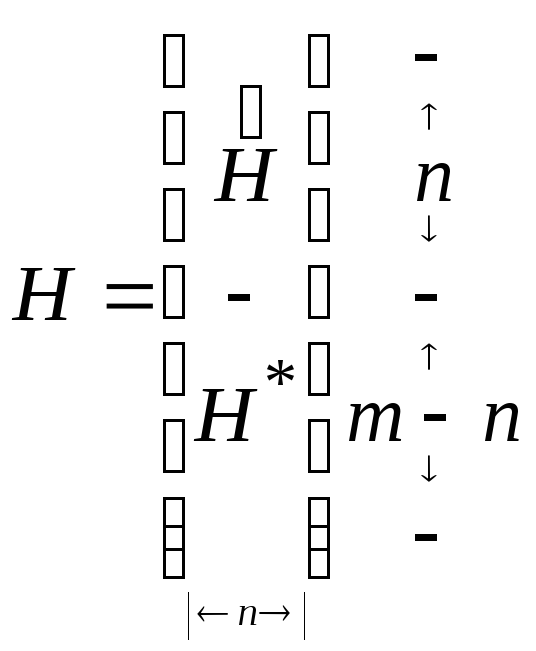
Запишем H размерности (m x n ), состоящую из т строк, отвечающих уравнениям (1.53)
![]()
где ..…………………………
![]()
Известно, что если столбцовый ранг матрицы H равен k n , то наилучшая оценка J1 (x) определяется на множестве из k измерений, выбранных из у1, y2,…, ym . Следовательно, если имеются т измерений и n известных векторов Hj, j= 1,..., n, то при ранге матрицы Н, равном k,функция
![]()
являющаяся
наилучшей оценкой по критерию
![]() ,
точно интерполирует, по крайней мере,
k
измерений.
Напомним, что оценка по критерию
,
точно интерполирует, по крайней мере,
k
измерений.
Напомним, что оценка по критерию
![]() не обязательно должна удовлетворять
этому условию. Гиперплоскость вообще
может не проходить через какую-либо
экспериментальную точку, в то время как
минимум суммы наименьших квадратов
будет обеспечен.
не обязательно должна удовлетворять
этому условию. Гиперплоскость вообще
может не проходить через какую-либо
экспериментальную точку, в то время как
минимум суммы наименьших квадратов
будет обеспечен.
Решение линейной задачи по минимизации (1.54) может быть получено с помощью одного из известных алгоритмов, описанных в литературе. Однако, можно предложить очень эффективный вычислительный алгоритм, базирующийся по структуре на двухступенчатом решении. C этой целью запишем (1.54) в следующем виде:
![]() (1.55)
(1.55)
Очевидно, мы вправе полагать, что минимуму (1.55) соответствуют значения
 (1.56)
(1.56)
………..
![]()
Применяя это же условие к критерию (1.54), будем иметь
 (1.57)
(1.57)
……………..
![]()
Система (1.56) содержит т уравнений с n неизвестными. Для переопределенной системы мы не можем обеспечить условие (1.56). Поэтому на первой ступени решения (1.57) ограничимся приближением, соответствующим минимуму критерия J2 , т.е. получим оценку методом наименьших квадратов (см. формулу 1.15)
![]()
Определим остатки для каждого измерения и получим систему уравнений
 (1.58)
(1.58)
……. ……. ……. ……. ……. ……. ……. …..
![]() .
.
Если ранг H равен k, причем k n, то для наилучшей оценки x по критерию J1 оцениватель должен обеспечить точное прохождение гиперплоскости через k точек из всех измерений, входящих в вектор у. При этом выбранные точки должны иметь наименьшие остатки.
Ha
второй ступени решения, сформировав
вектор
![]() из
уравнений
(1.58), мы можем выполнить сортировку r
в порядке возрастания его элементов. C
этой целью в среде MatLAB
воспользуемся
оператором
из
уравнений
(1.58), мы можем выполнить сортировку r
в порядке возрастания его элементов. C
этой целью в среде MatLAB
воспользуемся
оператором
![]() и получим матрицу, содержащую строку
rl
и строку I,
содержащую индексы, использованные при
сортировке.
и получим матрицу, содержащую строку
rl
и строку I,
содержащую индексы, использованные при
сортировке.
Для
определенности положим, что k
=
n,
т.е.
матрица H
имеет полный ранг. Тогда вектор rl
можно представить в виде блоков
![]() :
:
 (1.59)
(1.59)
где
![]() - (n
Ч
1)- вектор, содержащий наименьшие остатки,
- (n
Ч
1)- вектор, содержащий наименьшие остатки,
![]() - вектор, в который
вошли все оставшиеся ri
,
определенные
системой (1.58).
- вектор, в который
вошли все оставшиеся ri
,
определенные
системой (1.58).
Аналогично
разделим матрицу H
на два блока
![]() размерности (nЧn)
и
размерности (nЧn)
и
![]() -
матрицу
-
матрицу
![]()
 (1.60)
(1.60)
Уравнения, входящие в первый блок, можно представить как
![]() (1.61)
(1.61)
где
![]() - вектор;
- вектор;
![]() -
квадратная матрица х
- (nЧ1)
- вектор. Решение (1.7-9) определим путем
инверсии
-
квадратная матрица х
- (nЧ1)
- вектор. Решение (1.7-9) определим путем
инверсии
![]() :
:
![]() (1.62)
(1.62)
Мы получим наилучшую оценку по критерию J1. Далее нетрудно определить вектор остатков
![]()
![]() (1.63)
(1.63)
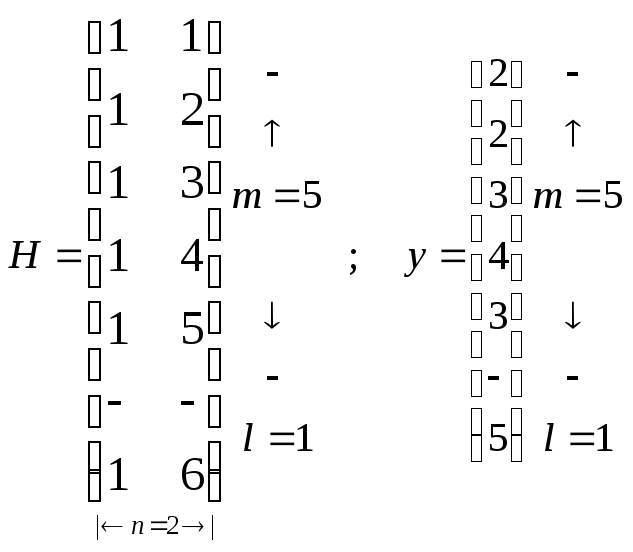
Для
иллюстрации "работы" алгоритма,
представленного системой уравнений
(1.55![]() 1.63),
возвратимся вновь к примеру построения
модели наблюдателя, параметры которого
оцениваются по экспериментальным данным
в точках (1, 2), (2, 2), (3, 3), (4, 4), (5, 3):
1.63),
возвратимся вновь к примеру построения
модели наблюдателя, параметры которого
оцениваются по экспериментальным данным
в точках (1, 2), (2, 2), (3, 3), (4, 4), (5, 3):
![]()
Необходимо
оценить коэффициенты а1
и
а2
по
критерию минимума эвклидовой нормы при
условии, что должно точно выполняться
ограничение
![]() ,
где С
= [1,б], d=
= [5].
,
где С
= [1,б], d=
= [5].
Согласно (1.60) матрица Н будет иметь вид
Для
оценки
![]() методом наименьших квадратов воспользуемся
формулой
методом наименьших квадратов воспользуемся
формулой
B результате для матрицы H размерности (5Ч2) будем иметь
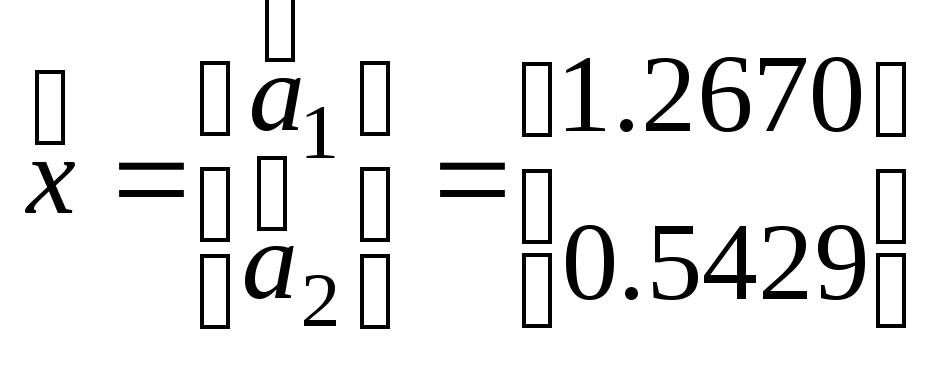
и, следовательно, в соответствии с (1.58), вектор остатков

Так
как ранг матрицы H
равен 2, процедура оценивания должна
состоять в "пригонке" лишь двух
точек, через которые должна проходить
прямая
![]() .
Эти точки должны соответствовать первому
и третьему элементам вектора r.
Однако по условиям ограничений эта же
прямая должна проходить через точку с
координатами (6, 5). Следовательно, вместо
точки (1, 2), для которой справедливо
.
Эти точки должны соответствовать первому
и третьему элементам вектора r.
Однако по условиям ограничений эта же
прямая должна проходить через точку с
координатами (6, 5). Следовательно, вместо
точки (1, 2), для которой справедливо
![]() ,
необходимо ввести координаты (6, 5).
Тогда, согласно (1.60), матрица
,
необходимо ввести координаты (6, 5).
Тогда, согласно (1.60), матрица
Оптимальная оценка по критерию J1