

-
Динамические системы с двумя накопителями энергии
Для динамических
систем, содержащих одну массу и одну
пружину (аналогично – в электрических
цепях – индуктивность и емкость) и
находящихся под действием постоянной
силы (постоянной ЭДС источника
электроэнергии), можно предложить
решения в аналитическом виде. Действительно,
при наличии двух накопителей электроэнергии
матрицы в уравнении (5.48) можно записать:
 ,
,
![]() .
.
Сила, воздействующая
на систему,
![]() на интервале
на интервале
![]() приводит к изменению переменных состояния
– перемещения и скорости тела. Если
приводит к изменению переменных состояния
– перемещения и скорости тела. Если
![]() и вектор начальных условий (на левой
границе) равен
и вектор начальных условий (на левой
границе) равен
![]() ,
то поведение динамической системы будет
зависеть от корней характеристического
уравнения (собственных значений матрицы
,
то поведение динамической системы будет
зависеть от корней характеристического
уравнения (собственных значений матрицы
![]() ).
).
Корни комплексно-сопряженные.
Это условие выполняется при таких численных значениях элементов матрицы, которые отвечают неравенству:
 , (5.0)
, (5.0)
поскольку собственные значения
 (5.0)
(5.0)
Неравенство (5.51) характеризует малый уровень диссипации (рассеяния) энергии, что приводит к появлению колебательных режимов в электрических цепях и динамических системах.
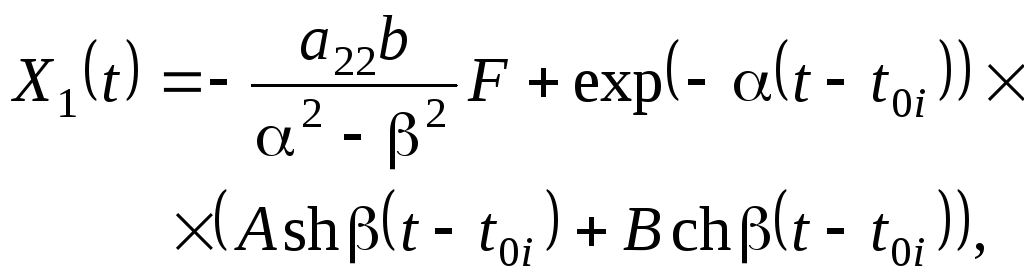
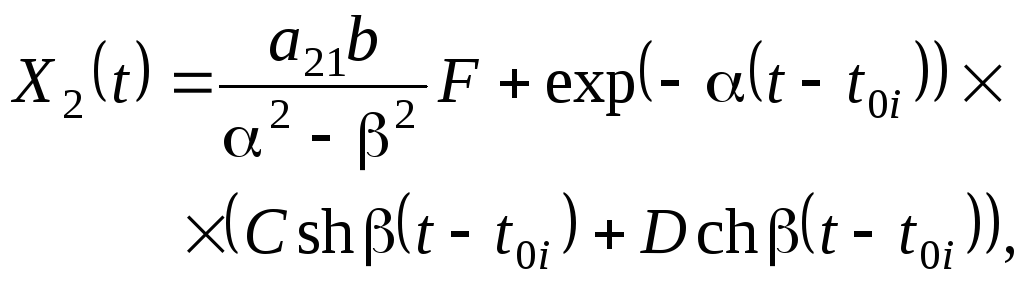
Искомые переменные состояния определим с помощью следующих зависимостей:
 (5.0)
(5.0)
 (5.0)
(5.0)
В уравнениях (5.535.54) расчетные коэффициенты находятся с помощью следующих соотношений:
 ;
;
 , (5.0)
, (5.0)
 , (5.0)
, (5.0)
 , (5.0)
, (5.0)
 (5.0)
(5.0)
Нетрудно видеть,
что при
![]() аргумент
аргумент
![]() .
.
Коэффициенты, входящие в уравнение (5.54), вычисляются по формулам:
 , (5.0)
, (5.0)
 , (5.0)
, (5.0)
 , (5.0)
, (5.0)
причем
![]() ,
если
,
если
![]() .
.
Кратные корни.
Из (5.52) следует,
что
![]() ,
если выражение под корнем равно нулю:
,
если выражение под корнем равно нулю:
 (5.0)
(5.0)
Режим, характеризуемый
равенством (5.62), может быть получен путем
изменения коэффициентов
![]() и
и
![]() (увеличение активного сопротивления в
электрической цепи, либо коэффициента
при первой производной в дифференциальном
уравнении динамической системы второго
порядка). На практике этот режим
встречается достаточно редко. Однако,
решения уравнений для этого режима
также полезно привести:
(увеличение активного сопротивления в
электрической цепи, либо коэффициента
при первой производной в дифференциальном
уравнении динамической системы второго
порядка). На практике этот режим
встречается достаточно редко. Однако,
решения уравнений для этого режима
также полезно привести:
 (5.0)
(5.0)
 (5.0)
(5.0)
В уравнениях (5.63)
и (5.64) коэффициенты
![]() ,
,
![]() ,
,
![]() и
и
![]() вычисляются по следующим формулам:
вычисляются по следующим формулам:
 (5.0)
(5.0)
 (5.0)
(5.0)
 (5.0)
(5.0)
 (5.0)
(5.0)
Параметр
![]() определяется, как и ранее, с помощью
уравнения (5.55).
определяется, как и ранее, с помощью
уравнения (5.55).
Вещественные неравные корни
Дальнейшее увеличение рассеяния энергии в системе ведет к тому, что:
 , (5.0)
, (5.0)
собственные
значения матрицы
![]() становятся вещественными и различными,
а переходный процесс – апериодическим.
Для расчета переменных состояния можно
использовать следующие зависимости:
становятся вещественными и различными,
а переходный процесс – апериодическим.
Для расчета переменных состояния можно
использовать следующие зависимости:
 (5.0)
(5.0)
 (5.0)
(5.0)
 (5.0)
(5.0)
Коэффициенты
![]() ,
,
![]() ,
,
![]() ,
,
![]() и
и
![]() определяются с помощью ранее приведенных
уравнений (5.555.60).
Для справки напомним, что гиперболический
синус и косинус вычисляются с помощью
экспонент:
определяются с помощью ранее приведенных
уравнений (5.555.60).
Для справки напомним, что гиперболический
синус и косинус вычисляются с помощью
экспонент:
 .
.
Полученные
зависимости (5.515.72)
приведены для расчета переходного
процесса на
![]() -ом
участке (временном интервале). Исходными
данными для расчета на
-ом
участке (временном интервале). Исходными
данными для расчета на
![]() -ом
интервале должны быть, естественно,
соответствующие
-ом
интервале должны быть, естественно,
соответствующие
![]() ,
,
![]() и сила
и сила
![]() ,
а также
,
а также
![]() .
.
При
этом начальные условия должны быть
равны конечным условиям на
![]() -ом
интервале:
-ом
интервале:
![]() и
и
![]() .
.
Отметим также, что полученные формулы могут быть легко запрограммированы, а выбор одной из трех групп формул для расчета может быть произведен по результатам оценки, выполненной с помощью соотношений (5.51), (5.62) и (5.69).