-
Моделирование –цепей. Аналитические решения
В четвертой главе
была рассмотрена процедура составления
дифференциальных уравнений путем
приведения исходной
![]() -цепи
к резистивной форме. Возвратимся теперь
к электрической цепи, изображенной на
рис. 5.11 а) и остановимся на решении
дифференциальных уравнений, используя
матричный метод анализа переходных
процессов.
-цепи
к резистивной форме. Возвратимся теперь
к электрической цепи, изображенной на
рис. 5.11 а) и остановимся на решении
дифференциальных уравнений, используя
матричный метод анализа переходных
процессов.
В ектор
состояния
ектор
состояния
![]() содержит две составляющие: ток
содержит две составляющие: ток
![]() и напряжение
и напряжение
![]() ,
то есть:
,
то есть:
![]() .
.
Уравнения динамики цепи имеют вид:
![]() , (5.0)
, (5.0)
где
![]() – ЭДС источника электроэнергии,
– ЭДС источника электроэнергии,
 (5.0)
(5.0)
Поведение
![]() -цепи
зависит от собственных чисел матрицы
-цепи
зависит от собственных чисел матрицы
![]() ,
которые мы можем изменять путем вариации
значений активных сопротивлений,
индуктивности и емкости.
,
которые мы можем изменять путем вариации
значений активных сопротивлений,
индуктивности и емкости.
Рассмотрим несколько частных случаев.
-
Сопротивления ,
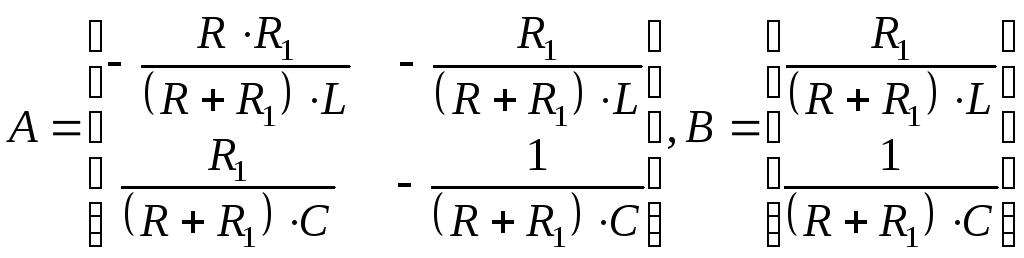
Элементы матриц уравнения (5.23) принимают следующие значения:
 ,
,
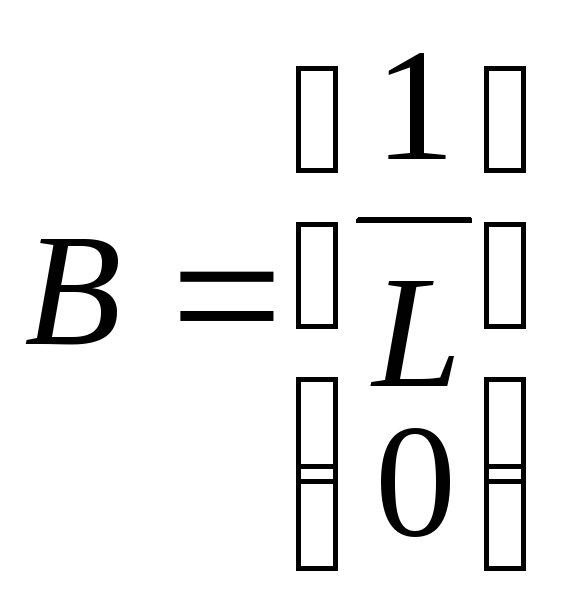 (5.0)
(5.0)
Электрическая
цепь становится неразветвленной,
состоящей из последовательно соединенных
![]() и
и
![]() (рис. 5.11 б)).
(рис. 5.11 б)).
Поскольку активные сопротивления в цепи отсутствуют, динамическая система становится консервативной, и теоретически переходный процесс должен протекать без рассеяния (потерь) энергии.
До замыкания ключа
![]() ток через индуктивность и напряжение
на емкости равны нулю. Следовательно,
вектор начальных условий
ток через индуктивность и напряжение
на емкости равны нулю. Следовательно,
вектор начальных условий
![]() .
.
Для определения характеристического уравнения системы (5.22) составим определитель (детерминант) матрицы:
 (5.0)
(5.0)
Поскольку собственные
значения матрицы
![]() численно совпадают с корнями
характеристического уравнения (5.25), то
они равны:
численно совпадают с корнями
характеристического уравнения (5.25), то
они равны:
 ,
где
,
где
![]() – собственная частота цепи (рис. 5.11 б)).
– собственная частота цепи (рис. 5.11 б)).
Для удобства проведения математических преобразований воспользуемся операторным методом. Применение операторного метода позволяет в области изображений (частотной области) обращаться с матричным дифференциальным уравнением как с алгебраическим.
Процедура решения состоит в следующем. Сначала с помощью таблиц преобразований Лапласа осуществляется операция перевода дифференциального уравнения из области оригиналов (временная область) в область изображений (частотная область). Затем выполняются решения алгебраического уравнения в частотной области относительно вектора состояния, записанного в операторной форме. На последнем этапе также с помощью таблиц преобразований Лапласа производится переход от алгебраического уравнения в частотной области к уравнению во временной области (переход из области изображений в область оригиналов). Все данные таблиц преобразований Лапласа в среде MatLAB можно найти в приложении Symbolic Toolbox - пакете символьной математики [20].
При нулевых начальных условиях переход в область изображений для слагаемых уравнения (5.22) будет заключаться в использовании следующих данных:
![]()


 ,
,
![]() ,
,
![]() , (5.0)
, (5.0)
г де
де
![]() – оператор Лапласа, есть знак соответствия
между выражениями во временной области
(слева от знака) и частотной области
(справа от знака).
– оператор Лапласа, есть знак соответствия
между выражениями во временной области
(слева от знака) и частотной области
(справа от знака).
С учетом (5.26) получим операторную форму записи матричного дифференциального уравнения (5.22):
![]() (5.0)
(5.0)
Обращаясь с формулой
(5.27) как с алгебраическим матричным
уравнением, мы вправе записать:
![]() .
.
Его решение относительно вектора переменных состояния в операторной форме:
![]() (5.0)
(5.0)
С учетом (5.24) уравнение (5.28) примет вид:
 (5.0)
(5.0)
Обратная матрица
в уравнении (5.29) определится с помощью
стандартной процедуры инверсии:
 ,
где
,
где
![]() – присоединенная для
– присоединенная для
![]() матрица,
матрица,
![]() – определитель матрицы
– определитель матрицы
![]() .
В рассматриваемом случае инверсная
матрица для
.
В рассматриваемом случае инверсная
матрица для
![]() :
:
 .
.
Таким образом, в операторной форме ток через индуктивность:
 (5.0)
(5.0)
Напомним, что согласно таблицам преобразований Лапласа, выполняется условие соответствия:
 (5.0)
(5.0)
Воспользуемся этим соответствием для перехода из области изображений в область оригиналов. Току через индуктивность, определенному формулой (5.30), во временной области соответствует выражение:
 , (5.0)
, (5.0)
где
 – амплитуда тока. Таким образом, ток в
электрической цепи изменяется по закону
синуса.
– амплитуда тока. Таким образом, ток в
электрической цепи изменяется по закону
синуса.
Напряжение на емкости в операторной форме, согласно (5.29), равно:
 . (5.0)
. (5.0)
Из правил выполнения
преобразований Лапласа известно, что
интегрирование функции в области
оригиналов (при нулевых начальных
условиях) соответствует делению на
оператор
![]() этой функции в области изображений.
Обращаясь вновь к уравнению (5.33) и
соответствию (5.31), мы видим, что в
знаменателе (5.33) содержится оператор
этой функции в области изображений.
Обращаясь вновь к уравнению (5.33) и
соответствию (5.31), мы видим, что в
знаменателе (5.33) содержится оператор
![]() .
Следовательно, выражение
.
Следовательно, выражение
 в частотной области соответствует
интегралу правой части (5.31) во временной
области.
в частотной области соответствует
интегралу правой части (5.31) во временной
области.
Поэтому для
напряжения на емкости как функции
времени имеем:
![]() ,
где
,
где
![]() – постоянная интегрирования, определяемая
из начальных условий. Действительно,
напряжение
– постоянная интегрирования, определяемая
из начальных условий. Действительно,
напряжение
![]() .
Тогда постоянная интегрирования
.
Тогда постоянная интегрирования
![]() .
.
Подставляя это
выражение в записанное выше выражение
для
![]() ,
мы получим:
,
мы получим:
![]() . (5.0)
. (5.0)
Напряжение на индуктивности определим по формуле:
 . (5.0)
. (5.0)
Для наглядного
представления кривых, определяемых
формулами (5.32), (5.34) и (5.35), построим графики
с помощью MatLAB и выведем их на печать.
Составим программу, представленную
файлом
![]() .
.
Программа содержит
текстовые комментарии, которые начинаются
со знака «%». Затем задается вектор
времени
![]() ,
изменяющийся от 0 до 6
,
изменяющийся от 0 до 6![]() (при шаге дискретности
(при шаге дискретности
![]() ).
Принятые расчетные значения:
).
Принятые расчетные значения:
![]() ;
;
![]() .
Построение графиков выполняется
оператором
.
Построение графиков выполняется
оператором
![]() .
По окончании построения графиков
оператором
.
По окончании построения графиков
оператором
![]() задается пауза. Обратите внимание на
то, что все вычисления производятся в
процессе выполнения оператора
задается пауза. Обратите внимание на
то, что все вычисления производятся в
процессе выполнения оператора
![]() .
.
Файл
![]()
%File “sah36.m”.
%Plots for electrical system.
%LC-circuit with DC source
Im=0.5; E=2;
x=0:0.02*pi:6.0*pi;
subplot(221);
plot(x, Im*sin(x), x, E*(1-cos(x)), x, E*cos(x)), grid
pause
Графические построения приведены на рис.5.12.
Из приведенных
графиков следует, что кривая напряжения
на емкости располагается выше оси
абсцисс (то есть
![]() не принимает отрицательных значений).
Напряжение имеет постоянную составляющую
не принимает отрицательных значений).
Напряжение имеет постоянную составляющую
![]() и составляющую
и составляющую
![]() ,
изменяющуюся с собственной частотой
,
изменяющуюся с собственной частотой
![]() .
В любой момент времени сумма напряжений
на емкости и индуктивности равна
постоянному значению, равному
.
В любой момент времени сумма напряжений
на емкости и индуктивности равна
постоянному значению, равному
![]() ,
что отвечает закону Кирхгофа:
,
что отвечает закону Кирхгофа:
![]()