

-
Краткие сведения о решателях дифференциальных уравнений
Для решения обыкновенных дифференциальных уравнений с заданными начальными условиями (задачи Коши) в системе MatLAB используются функции-решатели. Они позволяют пользователю выбирать метод решения, вводить начальные условия и назначать специальные опции для повышения информативности выполняемых вычислительных операций .
Решение дифференциальных уравнений обычно производится с помощью функций класса ОDE, номера которых выбираются в зависимости от назначения [34]:
функция ОDE45 – наиболее употребляемая, порядок метода – переменный;
функция ОDE23 – используется при низких требованиях к точности;
функция ОDE23S –применяется при низких требованиях к точности и необходимости решения систем уравнений в неявной форме Коши (например, в виде M*dx/dt=F(x,t); явная форма имеет структуру dx/dt=f(x,t) );
функция ОDE23t – если допустима умеренная точность и если решаются осцилляционные задачи без демпфирования;
функция ОDE23tb – при низких требованиях к точности решения уравнений в неявной форме Коши с нестационарной матрицей при производных;
функция ОDE113 – при высоких требованиях к точности и решении уравнений со сложными правыми частями.
Синтаксис функции:
[t,x,s]=ode45(‘файл-функция’,[t0 tf],x0)
Здесь [t0 tf] –временной интервал интегрирования,
x0 – вектор- столбец начальных условий,
t – текущее время ( выводимое на каждом шаге интегрирования);
x – вектор переменных состояний;
s – сведения о ходе вычислений (при выводе расчетных данных может не использоваться).
В средах MatLAB последних версий содержатся операторы, предназначенные для решения двухточечных граничных задач.
В каждом файле
содержится программа, предназначенная
для численного интегрирования
дифференциальных уравнений методом
Рунге-Кутта. Программой предусматривается
автоматический выбор шага интегрирования.
Для решения задач с использованием
решателя
![]() необходимо знать начальное время
интегрирования, конечное время
интегрирования, вектор начальных
условий, а в строке, выполняющей процедуру
интегрирования, – в скобках указать
файл- функцию, где содержатся
дифференциальные уравнения модели
динамики системы. Если требуется вывести
на дисплей решение в графической форме,
необходимо заполнить правильно строки
с оператором
необходимо знать начальное время
интегрирования, конечное время
интегрирования, вектор начальных
условий, а в строке, выполняющей процедуру
интегрирования, – в скобках указать
файл- функцию, где содержатся
дифференциальные уравнения модели
динамики системы. Если требуется вывести
на дисплей решение в графической форме,
необходимо заполнить правильно строки
с оператором
![]() .
.
Поясним описанную процедуру на примере интегрирования линейного дифференциального уравнения с двумя накопителями энергии.
Предположим, что необходимо определить переходный процесс в динамической системе, описываемой матричным уравнением:
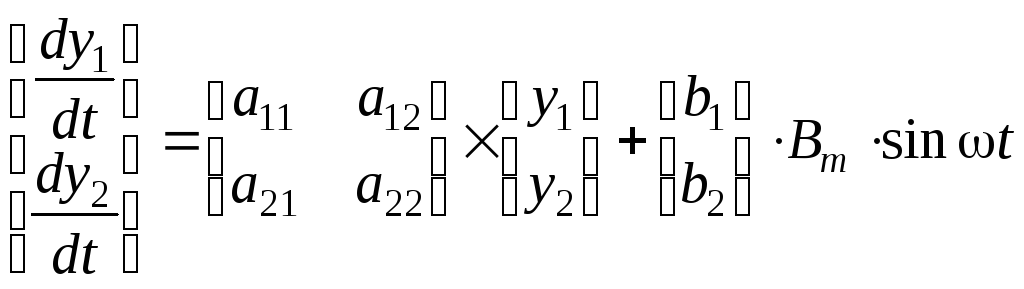 , (5.0)
, (5.0)
где для определенности примем следующие значения постоянных коэффициентов и элементов матриц:
 (5.0)
(5.0)
Вектор
начальных условий
![]() ,
время интегрирования
,
время интегрирования
![]() .
Заданная погрешность интегрирования
.
Заданная погрешность интегрирования
![]() не указана (по умолчанию
не указана (по умолчанию
![]() ).
).
Собственные
значения матрицы
![]() являются комплексно-сопряженными
числами с отрицательной вещественной
частью:
являются комплексно-сопряженными
числами с отрицательной вещественной
частью:
![]() .
.
Решение задачи
выполняется с помощью двух программ,
представленных файлами
![]() и
и
![]() .
Первая программа является основной, а
вторая – вспомогательной (файл-функцией),
служащей для записи правой части
уравнения (5.1) со значениями коэффициентов,
соответствующими данным (5.2).
.
Первая программа является основной, а
вторая – вспомогательной (файл-функцией),
служащей для записи правой части
уравнения (5.1) со значениями коэффициентов,
соответствующими данным (5.2).
Файл «MMM.M»
%Investigation of the second-order dynamical systems.
%The main file ‘mmm.m’ and the complementary file ‘sah2.m’.
echo off
clc
%To simulate a system, we create a function M-file that returns
%state derivatives. Given state and time values. For this example,
%we’ve created a file called SAH2.M. Here’s what it looks like:
R=[0 1; -1 0]
eig(R)
pause %Strike any key to continue.
сlc
%To simulate the differential equation defined in SAH2 over the
%interval 0<t<20, we invoke ODE23:
t0=0;
tfinal=40;
y0=[2.5 12.5]’; %Define initial conditions.
%[t, y]=ode23(‘sah2’, t0, tfinal, y0):
pause %Strike any key to start ODE23 solution.
tol=1.e-3; %Accuracy
trace=-2.2;
[t, y]=ode23(‘sah2’, t0, tfinal, y0, tol, trace);
plot(t, y), title (‘Second-order equation time history’), grid,
pause
plot(y(:,1),y(:,2)), title(‘Second-order equation - phase plane plot’),
grid,
pause
Файл «SAH2.M»
%File ‘sah2.m’.
%The behavior of dynamical system (electrical circuits model).
%Two energy capacitance.
function yprime=sah2(t, y);
%This program is auxiliary and implemented with the
%main program (file ‘mmm.m’).
%Matrix coefficients: a11=0, a12=-1, a21=1, a22=-0.2
yprime=[0 –1; 1 –0.2]*[y(1) y(2)]’+[1 0]’*4*sin(3*t);
Остановимся кратко
сначала на описании
![]() .
Комментарии к программе содержатся в
строках, начинающихся со знака «%».
Рабочая часть файла представляется
лишь двумя строками – четвертой и
восьмой. Четвертая строка содержит
оператор
.
Комментарии к программе содержатся в
строках, начинающихся со знака «%».
Рабочая часть файла представляется
лишь двумя строками – четвертой и
восьмой. Четвертая строка содержит
оператор
![]() (функция) и синтаксическое определение
этой функции. Функция с именем
(функция) и синтаксическое определение
этой функции. Функция с именем
![]() является функцией времени
является функцией времени
![]() и вектора
и вектора
![]() .
.
Уравнение (5.1) в
векторной форме записано в последней
(восьмой) строке. После знака равенства,
стоящего за функцией
![]() ,
записана матрица
,
записана матрица
![]() ,
которая умножена на вектор-столбец
,
которая умножена на вектор-столбец
![]() (обратите внимание на знак транспонирования).
К этой части уравнения добавляется (в
виде суммы) второе слагаемое матричного
уравнения, представляющее собой
воздействие внешнего синусоидального
сигнала на динамическую систему.
Вспомогательная программа должна быть
обязательно записана в файл
(обратите внимание на знак транспонирования).
К этой части уравнения добавляется (в
виде суммы) второе слагаемое матричного
уравнения, представляющее собой
воздействие внешнего синусоидального
сигнала на динамическую систему.
Вспомогательная программа должна быть
обязательно записана в файл
![]() ,
к которому в процессе решения периодически
будет обращаться основной файл
,
к которому в процессе решения периодически
будет обращаться основной файл
![]() .
.
Основной файл
![]() ,
также содержит комментарии, следующие
за каждым знаком «%» в соответствующих
строках, и операторы, обеспечивающие
выполнение следующих операций:
,
также содержит комментарии, следующие
за каждым знаком «%» в соответствующих
строках, и операторы, обеспечивающие
выполнение следующих операций:
![]() – оператор,
отключающий режим отображения листинга
на дисплей;
– оператор,
отключающий режим отображения листинга
на дисплей;
![]() – очищает экран
от записей, содержащихся на нем.
– очищает экран
от записей, содержащихся на нем.
В программе
используется также операция
![]() ,
позволяющая определить собственные
значения матрицы
,
позволяющая определить собственные
значения матрицы
![]() .
После вывода результата вычислений на
экран устанавливается пауза
.
После вывода результата вычислений на
экран устанавливается пауза
![]() .
Далее следуют строки с заданным начальным
временем интегрирования
.
Далее следуют строки с заданным начальным
временем интегрирования
![]() ,
конечным временем
,
конечным временем
![]() и вектором начальных условий
и вектором начальных условий
![]() .
Обратите также внимание на то, что
.
Обратите также внимание на то, что
![]() представляет собой вектор-столбец.
представляет собой вектор-столбец.
Интегрирование
выполняется решателем
![]() ,
при записи которого в круглых скобках
указываются данные, используемые в
процессе расчета. Здесь содержится файл
,
при записи которого в круглых скобках
указываются данные, используемые в
процессе расчета. Здесь содержится файл
![]() (расширение
(расширение
![]() не указывается), а также численные
значения других параметров, определяющих
режим работы внешнего файла. По завершении
расчетов на дисплей с помощью оператора
не указывается), а также численные
значения других параметров, определяющих
режим работы внешнего файла. По завершении
расчетов на дисплей с помощью оператора
![]() выводятся зависимости
выводятся зависимости
![]() и
и
![]() как функции времени, а оператор
как функции времени, а оператор
![]() служит для нанесения координатной сетки
из пунктирных линий. Чтобы изображение
не исчезло с экрана, мы используем
оператор
служит для нанесения координатной сетки
из пунктирных линий. Чтобы изображение
не исчезло с экрана, мы используем
оператор
![]() .
Наконец, после нажатия клавиши <Enter>
получим изображение процесса на фазовой
плоскости, где по оси
.
Наконец, после нажатия клавиши <Enter>
получим изображение процесса на фазовой
плоскости, где по оси
![]() отложена переменная
отложена переменная
![]() ,
а по оси
,
а по оси
![]() – переменная
– переменная
![]() .
.
Решение
дифференциального уравнения во временной
области представлено на рис. 5.1, а на
фазовой плоскости – на рис. 5.2. В процессе
анализа кривых, приведенных на рис. 5.1,
рекомендуется обратить внимание на
выполнение начальных условий в момент
![]() ,
а также на то, что с течением времени
переходный процесс затухает, и колебания
стремятся к вынужденным составляющим,
определяемым синусоидальным сигналом
от внешнего источника.
,
а также на то, что с течением времени
переходный процесс затухает, и колебания
стремятся к вынужденным составляющим,
определяемым синусоидальным сигналом
от внешнего источника.
В изображении фазового портрета особый интерес представляет область, характеризуемая наложением собственных затухающих колебаний на вынужденные колебания системы.
Чтобы внести новые
коррективы в модель системы, необходимо
войти в редактор, вызвать файл
![]() ,
в последней строке программы записать
требуемые значения элементов матриц
состояния и управления, а также параметры
сигнала внешнего источника (частоту,
амплитуду, фазу). Затем надо произвести
запись откорректированной программы
в тот же файл, либо в другой (если
необходимо сохранить исходный). Затем
следует с помощью редактора открыть
файл
,
в последней строке программы записать
требуемые значения элементов матриц
состояния и управления, а также параметры
сигнала внешнего источника (частоту,
амплитуду, фазу). Затем надо произвести
запись откорректированной программы
в тот же файл, либо в другой (если
необходимо сохранить исходный). Затем
следует с помощью редактора открыть
файл
![]() и также внести коррективы, изменив время
интегрирования (в зависимости от
собственных значений матрицы
и также внести коррективы, изменив время
интегрирования (в зависимости от
собственных значений матрицы
![]() ),
ошибку интегрирования, начальные условия
и др. Необходимо, в случае изменения
наименования вспомогательного файла,
указать его в строке содержащей
),
ошибку интегрирования, начальные условия
и др. Необходимо, в случае изменения
наименования вспомогательного файла,
указать его в строке содержащей
![]() .
Затем записать откорректированную
программу в файл под исходным, либо
новым именем (обязательно с расширением
.
Затем записать откорректированную
программу в файл под исходным, либо
новым именем (обязательно с расширением
![]() ).
Выход из редактора и вход в систему
MatLAB может осуществляться любым из
способов, принятых пользователем для
работы. Для расчетов по программе
необходимо набрать на экране монитора
наименование файла
).
Выход из редактора и вход в систему
MatLAB может осуществляться любым из
способов, принятых пользователем для
работы. Для расчетов по программе
необходимо набрать на экране монитора
наименование файла
![]() (без расширения), либо вызвать иной
основной файл с принятым именем.
(без расширения), либо вызвать иной
основной файл с принятым именем.
Следует иметь
ввиду, что по завершении вычислений все
расчетные результаты сохраняются. Можно
в режиме прямых вычислений вывести их
на экран в той форме, которая необходима.
Сначала можно определить размерность
вектора или матрицы с помощью функции
![]() .
При нажатии клавиши <Enter>
на экране появятся два числа. Теперь
можно вывести на экран любой вектор,
либо его часть. Например, с помощью
оператора
.
При нажатии клавиши <Enter>
на экране появятся два числа. Теперь
можно вывести на экран любой вектор,
либо его часть. Например, с помощью
оператора
![]() на экране отображаются строки с 21 по
40-ю в виде двух столбцов. В первом столбце
будут содержаться расчетные данные
вектора
на экране отображаются строки с 21 по
40-ю в виде двух столбцов. В первом столбце
будут содержаться расчетные данные
вектора
![]() ,
а во втором
,
а во втором
![]() .
.
В процессе вычислений по программе можно образовать матрицу, содержащую в первом столбце время, а во втором и третьем – переменные состояния, а затем вывести данные вычислений на экран и на печать. Все эти операции выполняются в системе MatLAB исключительно просто, а главное – в режиме прямых вычислений.
Если возникает
необходимость определения данных по
графикам, можно изменить масштабы по
осям
![]() ,
,
![]() и вывести только ту часть графических
изображений, которая представляет
интерес в данном конкретном случае.
и вывести только ту часть графических
изображений, которая представляет
интерес в данном конкретном случае.
Программа
![]() предназначена также для интегрирования
дифференциальных уравнений. Она
обеспечивает меньшую погрешность
вычислений (в сравнении с
предназначена также для интегрирования
дифференциальных уравнений. Она
обеспечивает меньшую погрешность
вычислений (в сравнении с
![]() )
за счет использования улучшенной
процедуры Рунге-Кутта.
)
за счет использования улучшенной
процедуры Рунге-Кутта.
В процессе
моделирования переходных режимов мы
предполагаем возвращение к программам
типа
![]() и
и
![]() .
Поэтому описание некоторых деталей
работы с программами будет дано в
последующих параграфах.
.
Поэтому описание некоторых деталей
работы с программами будет дано в
последующих параграфах.