

2.7. Модель оценки элементов матрицы преобразования
координат при управлении промышленным роботом
Изложенные в первой главе методы оценки параметров моделей систем широко используются для решения практических задач, связанных с обработкой результатов измерений при наличии помех. Покажем, каким образом процедуры МНК можно применить для повышения точности позиционирования промышленных роботов-манипуляторов в системах компьютерного управления энергоемкими технологическими процессами на водном транспорте.
Промышленные роботы и манипуляторы способны выполнять сложные пространственные перемещения тяжелых грузов при выполнении грузовых операций в портах, обеспечивать высокое качество тепловой резки металлов, производить сварочные работы на судостроительных и судоремонтных предприятиях, осуществлять сборочные и тяжелые рутинные операции при создании и ремонте судовых механизмов и машин, выполнении технологических операций в агрессивных средах, на больших глубинах при освоении шельфа и др.
Компьютерное
управление промышленным роботом связано
с реализацией траекторных процессов и
изменением пространственно-временных
координат, в которых осуществляется
перемещение его рабочих органов, в том
числе - при выполнении операций по смене
захвата. Операторы, осуществляющие
управление робототехническим комплексом,
для получения высокой точности выполнения
технологических операций должны
производить калибровку, что связано с
обеспечением соответствия координат
точки
![]() робота на рабочей плоскости координатам
робота на рабочей плоскости координатам
![]() компьютерной системы [50]. При изменении
положения робота на плоскости
компьютерной системы [50]. При изменении
положения робота на плоскости
![]() и, в частности, назначении очередного
рабочего участка для выполнения
технологических операций требуется
«перенастраивать» координаты в рабочей
области и приводить их в соответствие
с координатами
и, в частности, назначении очередного
рабочего участка для выполнения
технологических операций требуется
«перенастраивать» координаты в рабочей
области и приводить их в соответствие
с координатами
![]() .
Назначение новых координат необходимо
производить в случаях, когда требуется
обеспечить прецизионное управление
приводами звеньев робота, а также при
появлении ошибок, вследствие нагрузок
и увеличения зазоров в сопрягающихся
деталях.
.
Назначение новых координат необходимо
производить в случаях, когда требуется
обеспечить прецизионное управление
приводами звеньев робота, а также при
появлении ошибок, вследствие нагрузок
и увеличения зазоров в сопрягающихся
деталях.
Для
задания осей координат в базисе рабочего
пространства робота выберем три точки
![]() ,
,
![]() и
и
![]() таким образом, чтобы каждая пара точек
таким образом, чтобы каждая пара точек
![]() ,
,
![]() и
и
![]() ,
,
![]() образовывала прямоугольную систему
координат, в которой должны располагаться
все точки траектории движения робота.
Поскольку каждой точке
образовывала прямоугольную систему
координат, в которой должны располагаться
все точки траектории движения робота.
Поскольку каждой точке
![]() траектории движения робота должна
соответствовать точка
траектории движения робота должна
соответствовать точка
![]() компьютерного управляющего комплекса,
обеспечивающего управление приводами
звеньев и вывод траекторного процесса
на дисплей, то задаваемые координатные
оси должны быть представлены своим
компьютерного управляющего комплекса,
обеспечивающего управление приводами
звеньев и вывод траекторного процесса
на дисплей, то задаваемые координатные
оси должны быть представлены своим
![]() -эквивалентом.
В компьютерном базисе можно задать оси
прямоугольных координат с высокой
точностью, таким образом, что точкам в
базисе робота будут соответствовать
[50] :
-эквивалентом.
В компьютерном базисе можно задать оси
прямоугольных координат с высокой
точностью, таким образом, что точкам в
базисе робота будут соответствовать
[50] :
![]() - начало координат
- начало координат
![]() - расстояние от
начала координат по оси
- расстояние от
начала координат по оси
![]()
![]() - расстояние от
начала координат по оси
- расстояние от
начала координат по оси
![]()
Для
однородных координат в различных базисах
по трем приведенным выше парам точек
может быть установлена матрица
преобразования
![]() ,
обеспечивающая линейную связь для всего
множества
,
обеспечивающая линейную связь для всего
множества
![]() и
и
![]() с помощью соотношения:
с помощью соотношения:
 ,
где
,
где
 (2.61)
(2.61)
Элементы
матрицы
![]() определяются в результате решения
уравнений
определяются в результате решения
уравнений
 (2.62)
(2.62)
 (2.63)
(2.63)
 (2.64)
(2.64)
Нетрудно видеть, что условия (2.62), (2.63) и (2.64) выполняются однозначно, если
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Матрица
преобразования
![]() имеет вид
имеет вид
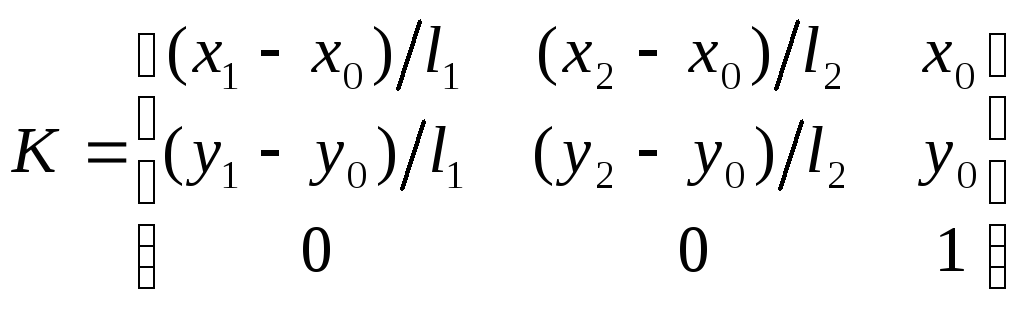 .
(2.65)
.
(2.65)
Заметим, что (2.65)
является матрицей полного ранга, и
поэтому возможно вычисление
![]() по измеренным
по измеренным
![]() и наоборот. Согласно (2.61), будем иметь
и наоборот. Согласно (2.61), будем иметь
 .
(2.66)
.
(2.66)
Однако
в «жесткой» системе уравнений при
наличии погрешностей в процессе измерений
![]() полностью сохраняется эта погрешность
в матрице K.
Она без коррекции будет линейно
преобразовываться с помощью (2.66). Вместе
с тем, при наличии дополнительных
измерений в точках
полностью сохраняется эта погрешность
в матрице K.
Она без коррекции будет линейно
преобразовываться с помощью (2.66). Вместе
с тем, при наличии дополнительных
измерений в точках
![]() и определении им эквивалентных координат
в базисе
и определении им эквивалентных координат
в базисе
![]() возможно получить переопределенную
систему уравнений для оценки элементов
матрицы
возможно получить переопределенную
систему уравнений для оценки элементов
матрицы
![]() и, таким образом, минимизировать вектор
среднеквадратической ошибки.
и, таким образом, минимизировать вектор
среднеквадратической ошибки.
Рассмотрим процедуру оценки.
Предположим,
что элементы матрицы
![]() необходимо получить по
необходимо получить по
![]() парам измерений координат в базисах
управляющего компьютера
парам измерений координат в базисах
управляющего компьютера
![]() и робота
и робота
![]() .
Введем матрицы размерности
.
Введем матрицы размерности
![]() :
:
 ,
,
 .
.
Тогда оценка
элементов
![]() ,
минимизирующая среднеквадратическую
ошибку измерений, может быть произведена
по формуле
,
минимизирующая среднеквадратическую
ошибку измерений, может быть произведена
по формуле
![]() (2.67)
(2.67)
Процедура оценки по формуле (2.67) эквивалентна алгоритму идентификации параметров дискретной динамической системы, рассмотренному ранее в работе авторов [22].
Приведем
пример. Оценим элементы
![]() для следующих измерений:
для следующих измерений:
 ,
,
 .
.
Используя формулу (2.67), выполним оценки элементов матрицы преобразования координат. В результате (в полном формате) будем иметь
 ,
,
после чего можно возвратиться к формулам (2.61) и (2.66) для выполнения практических расчетов, которые в среде MatLAB могут быть выполнены в режиме прямых вычислений.
Теперь
оценим элементы матрицы
![]() и положения осей
и положения осей
![]() ,
,
![]() только по измерениям, произведенным по
расположенной системе точек на выделенной
только по измерениям, произведенным по
расположенной системе точек на выделенной
![]() плоскости. Пусть для
плоскости. Пусть для
![]() получены численные значения векторов
получены численные значения векторов
![]()
![]()
![]()
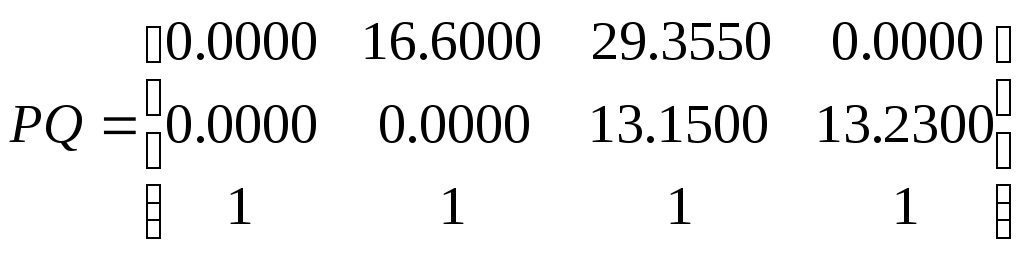
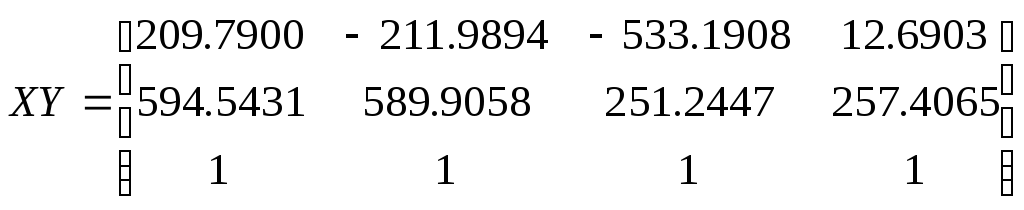
![]() Образуем
матрицы
Образуем
матрицы
![]() и
и
![]() и убедимся в том, что по формуле (2.67)
вновь получается ранее приведенное
и убедимся в том, что по формуле (2.67)
вновь получается ранее приведенное
![]() .
.
Далее,
выбрав
![]() и
и
![]() ,
рассчитаем для точек в базисе
,
рассчитаем для точек в базисе
![]()
![]() ,
,
![]() и
и
![]()
соответствующие
им точки в базисе
![]() :
:
 - начало координат,
- начало координат,
 - точка на оси
- точка на оси
![]() ,
,
 - точка на оси
- точка на оси
![]() .
.
Задачу аппроксимации
траектории движения робота предлагается
решать в такой последовательности.
Сначала в координатах
![]() необходимо назначить
необходимо назначить
![]() интерполяционных узлов. Затем с помощью
матрицы преобразования требуется найти
их эквиваленты в координатах
интерполяционных узлов. Затем с помощью
матрицы преобразования требуется найти
их эквиваленты в координатах
![]() и построить сплайн, по которому следует
управлять приводами робота. Затем
сплайн, эквивалентный найденному в
координатах робота
и построить сплайн, по которому следует
управлять приводами робота. Затем
сплайн, эквивалентный найденному в
координатах робота
![]() определяется с помощью
определяется с помощью
![]() .
.
Для выполнения расчетов матриц преобразования и сплайнов составлен скрипт-файл в среде MatLAB, фрагмент которого приводится ниже.
% Прецизионное управление роботом-манипулятором.
% ПОСТРОЕНИЕ СПЛАЙНОВ
%...........................................................
% Оценка элементов матрицы преобразования K по измерениям
% в четырех точках:
p=[0.0000 16.6000 29.3550 0.0000];
q=[0.0000 0.0000 13.1500 13.2300];
x=[209.7900 -211.9894 -533.1908 212.6903];
y=[594.5431 589.9058 251.2447 257.4065];
PQ=[p;q;ones(1,4)]
XY=[x;y;ones(1,4)]
K=inv(PQ*PQ')*PQ*XY'
pause
%K'=[-25.408397 0.219219 209.789976;
% -0.279355 -25.482732 594.543059;
% 0.000000 0.000000 1.000000]
%***********************************************************
% СПЛАЙН-АППРОКСИМАЦИИ
% Интерполяционные узлы в координатах (X,Y):
Xs=[70.0 6.6 -120.3 -247.1 -310.5 -373.7 -405.3 -436.7 -468.0 -499.0]
Ys=[593.0 587.2 565.4 538.5 517.5 486.2 460.4 421.8 370.5 280.9]
% Расчетные значения интерполяционных узлов в базисе (P,Q):
PQs=inv(K')*[Xs;Ys;ones(1,10)];
Ps=PQs(1,:);
Qs=PQs(2,:);
% Построение сплайна в базисе (P,Q):
ps_int=[5.5:0.1:28.0];
qs_int=spline(Ps,Qs,ps_int);
v=size(ps_int);
% Сплайн в базисе (X,Y):
XYspline=K'*[ps_int;qs_int;ones(1,v(2))];
% Графические построения:
subplot(211)
plot(Ps,Qs,'.',ps_int,qs_int),grid
xlabel('Ps'), ylabel('Qs')
pause
subplot(212)
plot(-Xs,-Ys,'.',-XYspline(1,:),-XYspline(2,:)),grid
xlabel('-Xs'), ylabel('-Ys')
Первый
блок файла предназначен для оценки
![]() ,
а второй – для сплайн аппроксимации
траектории движения.
,
а второй – для сплайн аппроксимации
траектории движения.
На приведенном
рис.2.12 (в верхней части) в координатах
![]() строится график, на котором точками
нанесены координаты интерполяционных
узлов, а сплошной линией – сплайн. В
нижней части рис.2.12 представлен эквивалент
этого графика в
строится график, на котором точками
нанесены координаты интерполяционных
узлов, а сплошной линией – сплайн. В
нижней части рис.2.12 представлен эквивалент
этого графика в
![]() -базисе.
Видно, что матрица
-базисе.
Видно, что матрица
![]() обеспечивает линейные
обеспечивает линейные

Рис. 2.12. Узлы интерполяции и сплайны в (Ps,Qs) и (Xs,Ys )- базисах
преобразования, которые связаны с процедурами растяжения и сжатия координат точек одного базиса относительно другого.