

ОБРАЗОВАНИЕ. ТРАНСПОРТ. ИННОВАЦИИ. СТРОИТЕЛЬСТВО
Сборник материалов III Национальной научно-практической конференции
_______________________________________________________________________________________
УДК 629.1.04
ПОВЫШЕНИЕ БЕЗОПАСНОСТИ РАБОТ НА КРАНАХ-МАНИПУЛЯТОРАХ УСТАНОВЛЕННЫХ НА АВТОМОБИЛЬНОМ ШАССИ
К.Г. Пугин1 2,доцент, доктор технических наук;
О.Н. Мехонин1,аспирант
1 Федеральное государственное бюджетное образовательное учреждение высшего образования «Пермский национальный исследовательский политехнический университет», Пермь, Россия
2Федеральное государственное бюджетное образовательное учреждение высшего образования «Пермский государственный аграрно-технологический университет
имени академика Д.Н. Прянишникова», Пермь, Россия
Аннотация. В статье рассмотрены условия повышения безопасности проведения работ при использовании крано-манипуляторных установок на автомобильных шасси. Показано, что существующие методики расчета грузовой устойчивости кранов не учитывают некоторые конструктивные особенности кранов установленных на автомобильном шасси. Представлена математическая модель позволяющая учесть жесткость шасси при определении опорного контура крана-манипулятора. Расчетная базапредставляет собой двухосное автомобильное шасси, кран-манипулятор установлен за кабиной автомобиля.
Ключевые слова: кран-манипулятор, устойчивость, безопасность, автомобильное шасси, ребро опрокидывания.
IMPROVEMENT OF SAFETY WHEN CARRYING OUT WORKS
ON THE CRANES-MANIPULATORS INSTALLED ON THE CAR CHASSIS
K.G. Pugin1 2, Associate Professor, Doctor of Technical Sciences;
O.N. Mehonin1, graduate student
1Federal State Budgetary Educational Institution of Higher Education
«Perm National Research Polytechnic University», Perm, Russia
2 Federal State Budgetary Educational Institution of Higher Education «Perm State Agro-Technological University named after Academician D.N. Pryanishnikov», Perm, Russia
Abstract. The article discusses the conditions for improving the safety of work when using cranemanipulator installations on automobile chassis. It is shown that existing methods for calculating the cargo stability of cranes do not take into account some design features of cranes mounted on a truck chassis. A mathematical model is presented that allows you to take into account the rigidity of the chassis when determining the supporting contour of the crane. The calculation base is a biaxial automobile chassis, a crane is installed behind the car cab.
Keywords: loader crane, stability, safety, automobile chassis, tipping rib.
Одно из главных требований, предъявляемым к грузоподъёмным машинам, является обеспечение безопасности при проведении работ. Это связано с тем, что груз может иметь большой вес, подъем может, осуществляется на большую высоту, при своем падении или потери устойчивости воздействие груза на человека будет фатальным. Именно поэтому при проектировании и изготовлении грузоподъёмных машин данному вопросу уделяется особое внимание. Аварии на кранах происходят по всему миру в не зависимости от технического развития стран [1, 2]. По мере увеличения использования кранов-манипуляторов (КМУ), увеличивается и число несчастных случаев в частности связанных с опрокидыванием кранов. Согласно статистикеприведенной корейскими специалистами общее количество несчастные случаи, связанные с КМУ, составляют примерно 6065% от всех несчастных случаев связанных с кранами[3]. Ряд европейских исследователей,
44
Направление 1. Транспортное и строительное машиностроение
_______________________________________________________________________________________
занимающихся обеспечением безопасности в строительной отрасли, в частности JukkaTakala(Финляндия) в своем докладе на международной конференции
(XVIIWorldCongressonSafetyandHealthatWork) проходимой в Швейцарии в 2005 г., утверждает, что количество несчастных случаев в строительной отрасли не поддается количественной оценке из-за отсутствия информации вследствие сокрытия таких фактов строительными организациями. Несчастные случаи на строительных объектах, в независимости от степени тяжести, приводят к потере ресурсов. Аварии на стройплощадках неизбежны, но можно контролировать риски возникновения таких аварий [4]
Анализ статистических данных аварийности указывает на то, что при эксплуатации грузоподъемных машинчасто происходит нарушение регламента проведения работ. Для избегания возникновения аварийных ситуаций по этой причине, необходимо на стадии проектирования заложить в конструкцию машины большее количество систем способных предотвратить нарушение регламента. В связи с ежегодным увеличением количества единиц КМУ находящихся в эксплуатации рассмотрение вопроса повышения безопасности при выполнении работ является актуальным.
Автомобильный кран – манипулятор представляет собой грузоподъёмную машину, состоящую из базового автомобильного шасси и крано-манипуляторной установки. Возможность установки кранового оборудования на автомобильное шасси определяется расчетами, исходя из допустимых нагрузок на оси транспортного средства и условия грузовой устойчивости. В каждом случае необходимо произвести расчеты занимающие значительное время от общего процесса изготовления. В этой связи важно использовать методику расчета, позволяющую максимально точно отразить конструктивные особенности создаваемой машины, обеспечив безопасность ее эксплуатации.Аварийные ситуации, в частности потеря устойчивостиКМУ,могутпроисходить из-за подъемагруза, не предусмотренного конструкцией КМУ, сильного ветра или при потере несущей способности грунта строительной площадкипри подъеме и перемещении КМУ груза.
Внастоящее время в РФ основными нормативными документами, в сфере грузоподъемного оборудования, являются Федеральные нормы и правила в области промышленной безопасности: «Правила безопасности опасных производственных объектов, на которых используются подъемные сооружения», «Правила устройства и безопасной эксплуатации грузоподъемных крановманипуляторов ПБ 10-257-98», «Правила устройства и безопасной эксплуатации грузоподъемных кранов ПБ 10-382-00». Однако в методике расчета грузовой устойчивости автомобильных крановманипуляторов лишь частично учитывается тип применяемой подвески шасси, количество аутригеров, отсутствуют положения, регламентирующие опорные площадки аутригеров, не учитывается жесткость подвески базового шасси.Все это вносит значительную погрешность в расчет грузовой устойчивости КМУ.
Внастоящее время коэффициент устойчивости крана-манипулятора должен быть больше 1,15. Обеспечение грузовой устойчивости возможно за счет увеличения удерживающего момента. Однако это влечет за собой увеличение массы базовой машины, стоимости, снижение ее эффективности.
Ранее авторамибыло проанализировано возможное смещения ребер опрокидывания автомобильного
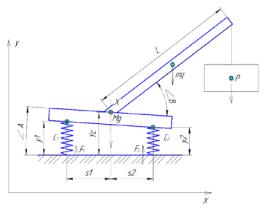
крана-манипулятора, возникающего из-за сжатия упругих элементов подвески базового шасси при подъеме груза [5-8]. В качестве примера была взята крановая установкаустановленная на двухосномавтомобильном шасси, с зависимой рессорной подвеской,поскольку именно зависимая подвеска является наиболее распространенной для выпускаемых в настоящее время автомобильных кранов-манипуляторов. В качестве функции отклика на смещение было выбрано значение коэффициента грузовой устойчивости. При этом была использована упрощенная физическая модель КМУ представленная на рисунке 1.
45
ОБРАЗОВАНИЕ. ТРАНСПОРТ. ИННОВАЦИИ. СТРОИТЕЛЬСТВО
Сборник материалов III Национальной научно-практической конференции
_______________________________________________________________________________________
Рисунок 1 – Упрощенная физическая модель КМУ на автомобильном шасси.
y1,y2 – высота основания шасси в точке крепления подвески, C1,C2 – жесткость элементов подвески, F1,F2 – силы реакции крана-манипулятора, s1, s2 – расстояние от центра тяжести шасси до мест крепления подвески, Р – вес груза, <A – поперечный угол наклона шасси,
<B – угол наклона стрелы, L- длина стрелы, Mg – центр масс шасси, mg – центр масс стрелы.
Полученные расчеты показали, что смещение ребра опрокидывания при изменении геометрических размеров подвески, может изменить итоговое значение коэффициента грузовой устойчивости от 0 до 9,5%. При кажущейся не значительной величине, необходимо указать, что расчет проводился без учета инерционных нагрузок, которые возникнут в действительности и без учета возможного проседания площадок опирания аутригеров.
Анализ научных изданий показал наличие различных методических подходов и использование большого количества физических и математических моделей применяемых для определения нагрузок, возникающих в элементах КМУ вследствие перемещения груза при выполнении работ, устойчивости КМУ[8-10]. В первых математических моделях, используемых для расчета конструкций автомобильных кранов, не учитывалось изменение геометрии расположения центра масс основных элементов при изменении жесткости опорной поверхности или упругой деформацииэлементов входящих в конструкцию аутригеров и рамы транспортного средства.В настоящее время проведены исследования, которые показывают большую значимость для коэффициента устойчивости КМУ от выше указанных параметров.
Висследованиях проведенных совместно тайванскими и китайскими учеными из университетов
«NationalChiaoTungUniversity» и «TaHwaInstituteofTechnology,QionglinShiangHsinchuCounty», (Taiwan, RepublicofChina) представленсимплексный метод линейного программирования для оценки допустимой силы нескольких аутригеров в условиях ограниченной устойчивости площадки опирания. Определение минимального и максимального усилия, возникающего на аутригерах при выполнении работ, дает возможность реализовать автоматическую систему способную предотвратить опрокидывание КМУ. По заявлению авторов фиксация нагрузки возникающей на каждом аутригере является эффективным средством предотвращения возникновения и других внештатных ситуаций [10].
Висследованиях проведенных совместно университетами «Engineering, MusashiInstitute» и «NationalInstituteofIndustrialSafety» (Япония) на основе экспериментальных данных дано теоретическое обоснование возможности управления несущей способности отдельных аутригеров при выполнении грузовых операциях для кранов-манипуляторов на автомобильном шасси. Были выполнены различные виды анализа, в том числе экспериментальные данные по сохранению устойчивости КМУ при ее потере одним или несколькими аутригерами. В результате изучения результатов экспериментов и моделирования выяснилось, что автомобильные краны становятся крайне неустойчивыми в результате высокой скорости потери несущей способности аутригеров [11].
Учитывая проведенные ведущими научными центрами исследования, в сфере устойчивости КМУ, был сделан вывод о необходимости доработать физическую модель КМУ, использованную нами для оценки смещения ребер опрокидывания автомобильного крана-манипулятора, возникающего из-за сжатия упругих элементов подвески базового шасси при подъеме груза (рисунок 1). Необходимо учитывать жесткость (несущую способность) опорной поверхности, на которую опираются аутригеры, так как их работоспособность, как показали исследования японских ученых, определяется несущей способностью опорной поверхности. Доработанная физическая модель КМУ для определения смещения ребер опрокидывания, с учетом жесткости шасси и несущей способности опорной поверхности представлена на рисунке 2.
46

Направление 1. Транспортное и строительное машиностроение
_______________________________________________________________________________________
Рисунок2– Упрощенная модель КМУ с учетом жесткости аутригеров.
y1,y2 – высота основания шасси в точке крепления подвески, C1,C2 – жесткость элементов подвески, C3,C4 – жесткость связи аутригер - опорная поверхностьF1,F2 – силы реакции кранаманипулятора,F3,F4– силы реакции на аутригерах s1, s2 – расстояние от центра тяжести шасси до мест крепления подвески, Р – вес груза, <A – поперечный угол наклона шасси, <B – угол наклона стрелы,
L –длина стрелы, Mg – центр масс шасси, mg – центр масс стрелы.
Несущая способность опорной поверхности, в предлагаемой схеме, заменена жесткостью связи аутригер - опорная поверхность. Это допущение требует учета реологических свойств грунтов и скорости нагружения аутригеров. Степень их влияния на коэффициент устойчивости КМУ возможно получить, основываясь на данных полученных при натурном эксперименте. В дальнейшем будет произведен расчет смещения ребра опрокидывания с учетом жесткости подвески базовой машины и упругой деформацией аутригеров и осадки грунта в зоне опорной площадок выносных опор.
Заключение
Проведенный обзор научной литературы посвященной повышению безопасности автомобильных кранов-манипуляторов показал, что количество аварий с участием кранов-манипуляторов не поддается точной оценке вне зависимости от уровня ее развития. Повысить безопасность КМУ возможно с помощью новых систем стабилизации базовых шасси, действие которых основываются на показаниях силовой загрузки аутригеров.
Расчет коэффициента устойчивости, с использованием статических схем нагружения, дает не точные данные. В настоящее время коэффициент устойчивости для КМУ снижен до 1,15, ошибка в расчетах в 10% может привести к аварии при его эксплуатации.Увеличение значения коэффициента устойчивости ведет к снижению эффективности КМУ (повышению металлоемкости, снижению грузоподъемности и ухудшениюгрузовысотных характеристик). Использование методики определения устойчивости основанной на контролеусилий на каждом аутригере, позволяет определить устойчивость крана при работе в реальном времени, может быть эффективным средством точного прогнозирования риска опрокидывания КМУ.
Библиографический список
1.Anezirisa, O.N. Towards risk assessment for crane activities. / O. N. Anezirisa, I. A. Papazoglou, M. L. Mud // Safety Science. – 2008. – vol.46, – No.6. – pp.872-884.– URL: https://www.researchgate.net/publication/229350415_Towards_risk_assessment_for_crane_activities(датаобращения:
10.03.2020)
2.Richard, L. Review of Crane Safety in the Construction Industry / RichardL.,Neitzel, Noah S. Seixa, Kyle K. Ren A Review. – DOI: 10.1080/10473220127411// Applied Occupational and Environmental Hygiene. – 2001. – 16:12. – рp. 1106-1117.
3.Oladiran, Olatunji Joseph Control measures of Accidents: Nigerian Building Projects’ Case: Proceedings of CIB- 2008-Transformation through Construction, 15-17 November, Dubai. – URL:https://www.researchgate.net/publication/329787114_Control_measures_of_accidents (датаобращения: 10.03.2020).
47
ОБРАЗОВАНИЕ. ТРАНСПОРТ. ИННОВАЦИИ. СТРОИТЕЛЬСТВО
Сборник материалов III Национальной научно-практической конференции
_______________________________________________________________________________________
4.Мехонин, О.Н. Влияние расположения ребер опрокидывания автомобильного крана-манипулятора на значение коэффициента грузовой устойчивости / О.Н.Мехонин, К.Г. Пугин // Актуальные вопросы применения инженерной науки: сборник материалов Международной студенческой научно-практической конференции / Рязанский государственный агротехнологический университет им. П.А. Костычева. – Рязань, 2019. – С. 48-53
5.Мехонин, О.Н. К вопросу размещения крано-манипуляторной установки на полуприцепах специального назначения c учетом их грузовой устойчивости / О. Н. Мехонин, К. Г. Пугин // Агротехнологии XXI века: материалы Всероссийской научно-практической конференции с международным участием, посвященной 100-летию высшего аграрного образования на Урале / Пермский государственный аграрно-технологический университет имени академика Д. Н. Прянишникова. – Пермь, 2019. – С. 347-350.
6.Мехонин, О.Н. Использование крано-манипуляторных установок на шасси малотоннажных грузовых автомобилей / О.Н.Мехонин, К.Г.Пугин, Р.В. Щеткин// Модернизация и научные исследования в транспортном комплексе. – 2019. – Т. 1. – С. 85-88.
7.Мехонин, О.Н. Влияние смещения зависимой подвески на шасси автомобильных кранов-манипуляторов при подъеме груза на значение коэффициента грузовой устойчивости / О.Н.Мехонин, К.Г.Пугин, Р.В. Щеткин // Химия. Экология. Урбанистика. – 2019. – Т. 2. – С. 139-143.
8.Лагерев, И.А. Динамика трехзвенных гидравлических кранов-манипуляторов / И.А. Лагерев, А.В. Лагерев. – Брянск: БГТУ, 2012. – 196 с.
9.Kacalak, Wojciech&Budniak, Zbigniew&Majewski, Maciej. Simulation model of a mobile crane with ensuring its stability (in Polish).ModelowanieInżynierskie - Modelling in Engineering.– 2016. – Vol 29. – pp.35-43. – URL:https://www.researchgate.net/publication/312590802_Simulation_model_of_a_mobile_crane_with_ensuring_its_sta bility_in_Polish(датаобращения: 10.03.2020).
10.Jeng, SL.Outrigger force measure for mobile crane safety based on linear programming optimization / SL.Jeng,
C.F. Yang and W. C. Chieng. – DOI: 10.1080/1539773090348270 // Mechanics Based Design of Structures and Machines.– 2010. – vol.38. – No.2. –pp.145-170.– URL:https://www.researchgate.net/publication/245329177_Outrigger_Force_Measure_for_Mobile_Crane_Safety_Based _on_Linear_Programming_Optimization(датаобращения 10.03.2020)
11. Tamate, S. Analysis of instability in mobile cranes due to ground penetration by outriggers / S. Tamate, N.Suemasa, T.Katada. // Journal of Construction Engineering and Management.– 2005. –Volume 131. Issue 6.– pp.689703. https://doi.org/10.1061/(ASCE)0733-9364(2005)131:6(689)(датаобращения: 10.03.2020).
48