

2629
.pdfФедеральное агентство по образованию
ГОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
В.С. Щербаков, А.В. Жданов
ОПТИМИЗАЦИЯ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МЕХАНИЗМОВ СТРОИТЕЛЬНЫХ И ДОРОЖНЫХ МАШИН
Монография
Омск
СибАДИ
2010
УДК 625.76.08(021) ББК 39.311-06-05
Щ 61
Рецензенты:
д-р техн. наук, проф. С.В. Корнеев (ОмГТУ); д-р техн. наук, доц. В.Н. Сорокин (ОмГТУ)
Монография одобрена редакционно-издательским советом СибАДИ.
Щербаков В.С., Жданов А.В.
Щ 61 Оптимизация конструктивных параметров гидравлических рулевых механизмов строительных и дорожных машин: монография / В.С. Щербаков,
А.В. Жданов. – Омск: СибАДИ, 2010. – 176 с.
ISBN 978–5–93204–548–0
В монографии представлен обзор существующих конструкций гидравлических рулевых механизмов, математическое моделирование системы рулевого управления строительных и дорожных машин с шарнирносочлененной рамой, решение задач анализа и синтеза с целью оптимизации основных конструктивных параметров гидравлических рулевых механизмов.
Работа может быть использована студентами при выполнении дипломных проектов и аспирантами в научно-исследовательской деятельности.
Ил. 115. Табл. 9. Библиогр.: 99 назв.
ISBN 978–5–93204–548–0 |
© ГОУ «СибАДИ», 2010 |
ОГЛАВЛЕНИЕ |
|
ВВЕДЕНИЕ………………………………………………………….................... |
5 |
1. ГИДРАВЛИЧЕСКИЕ РУЛЕВЫЕ МЕХАНИЗМЫ. УСТРОЙСТВО, |
|
ПРИНЦИП ДЕЙСТВИЯ, ПАРАМЕТРЫ И ТРЕБОВАНИЯ...................... |
7 |
1.1.Общие сведения об устройстве гидропривода рулевого управления.
Принцип действия ………………………………………................................. 7
1.2.Обзор существующих конструкций гидравлических рулевых механизмов и анализ тенденций их развития………………………...……... 8
1.3.Обзор предшествующих исследований по гидросистемам
рулевого управления…………..………………………………….….…….… |
15 |
1.4. Основные параметры гидравлических рулевых механизмов |
|
и требования к гидросистемам рулевого управления………………............ |
17 |
1.5. Критерии эффективности и пути рационализации рабочих |
|
процессов гидросистем рулевого управления………………………….….. |
24 |
2. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ |
|
РУЛЕВОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНЫХ И ДОРОЖНЫХ |
|
МАШИН С ШАРНИРНО-СОЧЛЕНЕННОЙ РАМОЙ……………............ |
28 |
2.1. Математическая модель гидросистемы рулевого управления..……… |
28 |
2.1.1.Расчетная схема гидросистемы рулевого управления……………. 29
2.1.2.Блок-схема гидросистемы рулевого управления…………………. 32
2.1.3.Математическое описание элементов гидросистемы
рулевого управления………………………………………………............ |
33 |
2.1.4. Обобщенная математическая модель гидросистемы |
|
рулевого управления………………………………………………….….. |
50 |
2.2. Математическая модель стохастических возмущающих |
|
воздействий, действующих на систему рулевого управления………..….. |
52 |
2.2.1.Математическая модель микрорельефа……………..................... 52
2.3.Имитационная модель поворота машины
сшарнирно-сочлененной рамой…………………………………………..... 57
2.3.1.Выбор и обоснование расчетной схемы………………………….. 59
2.3.2.Описание элементов машины…………………………………….. 62
2.3.3.Математическая модель сопротивлений в зоне контакта колес
с поверхностью, возникающих в процессе поворота машины……….. |
64 |
2.3.4. Обобщенная имитационная модель и визуализация |
|
процесса поворота………………………………………………………... |
66 |
3. ТЕОРЕТИЧЕСКИЕ ИССЛЕДОВАНИЯ ГИДРОСИСТЕМЫ |
|
РУЛЕВОГО УПРАВЛЕНИЯ……………………………………………....... |
71 |
3.1.Анализ гидросистемы рулевого управления………………………...... 71
3.1.1.Факторы, влияющие на формирование переходных процессов
в системе и степень их влияния ………………………………………… 71
3.1.2. Конструктивные параметры гидравлических рулевых механизмов, подлежащие анализу ……….……………………………... 73
3.1.3.План вычислительного эксперимента……………………………. 74
3.1.4.Управляющее воздействие………………………………............... 75
3.1.5.Границы и интервалы варьирования анализируемых
параметров………………………….…………………………………….. 76
3.1.6.Устойчивость гидросистемы рулевого управления……............... 77
3.1.7.Влияние основных конструктивных параметров
гидравлических рулевых механизмов на показатели качества гидросистемы рулевого управления………...……………………........... 87
3.2.Методика синтеза гидравлических рулевых механизмов ………........ 102
3.2.1.Задача оптимизации………………………….………...................... 104
3.2.2.Аппроксимация зависимостей…………………………………….. 107
3.2.3.Решение задачи условной оптимизации……………………….…. 124
3.2.4.Решение задачи безусловной оптимизации………………………. 126
3.2.5.Оптимальные значения конструктивных параметров
гидравлических рулевых механизмов ………………………..………..… 129 3.2.6. Исследование траекторий поворота машины с базовым
иоптимизированным гидравлическим рулевым механизмом …...……. 140
3.3.Инженерная методика выбора основных конструктивных
параметров гидравлических рулевых механизмов …………….................. |
143 |
3.4. Программный продукт для расчета основных конструктивных |
|
параметров гидравлических рулевых механизмов....................................... |
146 |
4. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ |
|
ГИДРАВЛИЧЕСКОГО РУЛЕВОГО МЕХАНИЗМА…………………...... |
152 |
4.1.Стендовые испытания гидравлического рулевого механизма……….. 152
4.1.1.Объект и аппаратура экспериментальных исследований………... 152
4.1.2.План эксперимента и уточнение коэффициентов
математической модели…………………………………………….......... |
162 |
4.2. Подтверждение адекватности математической модели…………….… |
165 |
Библиографический список………………………...................................….. |
170 |
ВВЕДЕНИЕ
В основном все пневмоколесные строительные и дорожные машины (СДМ) имеют общий принцип изменения направления движения посредством поворота управляемых передних или задних колес или складывания шарнирных полурам. Современное состояние развития СДМ характеризуется многообразием их типов и видов и, в частности, различием систем управления поворотом. Управление поворотом осуществляется за счет применения системы рулевого управления.
Система рулевого управления – система, включающая все элементы машины, расположенные между оператором и соприкасающимися с опорной поверхностью колесами и участвующие в управлении поворотом машины. По принципу действия системы рулевого управления подразделяются на механические, гидромеханические, гидравлические, электрические и комбинированные.
Наиболее широкое распространение в управлении поворотом СДМ с шарнирно-сочлененной рамой получили гидросистемы рулевого управления (ГРУ), основной функциональной подсистемой которых является гидравлический рулевой механизм (ГРМ). Это объясняется конструктивными особенностями машин с шарнирносочлененной рамой и тем, что усилие поворота таких СДМ значительно выше, чем других транспортных средств.
Наиболее перспективными являются ГРМ, имеющие в рабочем контуре гидромотор, обеспечивающий дозированную подачу рабочей жидкости к исполнительным гидроцилиндрам и осуществляющий гидрообъемную отрицательную обратную связь. В специальной технической литературе к ГРМ применяются термины: насос-дозатор, гидравлический руль или гидроруль, что означает, по сути, то же самое.
Несовершенство динамических характеристик ГРМ приводит к снижению (ухудшению) качества рабочих процессов ГРУ, что в свою очередь отрицательно сказывается на функционировании системы рулевого управления машины в целом.
При повороте рулевого колеса в процессе движения машины возникает, так называемое, рысканье, то есть отклонение машины от заданной траектории. Рысканье возникает из-за нестабильности переходных процессов в ГРУ, и обуславливается показателями
качества выходных характеристик ГРМ.
При больших скоростях движения в транспортном режиме рысканье оказывает наибольшее влияние на качество процесса поворота. Из-за того, что оператор непрерывно управляет рулевым колесом, возрастают отклонения от траектории, снижаются запасы устойчивости машины при входе в поворот и увеличивается время выхода на установившуюся траекторию движения, что может представлять угрозу для безопасности движения, поэтому оператор вынужден снижать скорость машины. В результате чего снижается эффективность в условиях эксплуатации.
Поскольку ГРМ является основным функциональным механизмом всей ГРУ, то повышение качества динамических характеристик гидросистемы может быть достигнуто путем оптимизации конструктивных параметров ГРМ.
Анализ работы отечественных предприятий, выпускающих ГРМ, выявил отсутствие систем автоматизированного проектирования гидравлических рулей и научно обоснованных методик выбора их основных конструктивных параметров, основанных на методах оптимизационного синтеза. Выбор конструктивных параметров ГРМ до сих пор производится традиционными инженерными методами, что не всегда приводит к положительному результату. Напротив, повышается количество брака и, зачастую, экспериментально подобрав значения конструктивных параметров, при которых выходные характеристики считаются руководством предприятия удовлетворительными, дальнейшая работа по повышению показателей для этой системы прекращается, таким образом, не всегда принимаются оптимальные конструкторские решения.
Все это повышает трудоемкость проектирования и производства, не способствует улучшению характеристик выпускаемых ГРМ, ухудшает конкурентоспособность отечественных систем даже на внутреннем рынке и снижает производительность СДМ, на которые они устанавливаются.
В связи с этим в настоящее время является актуальной проблема разработки научно обоснованной методики оптимизационного синтеза основных конструктивных параметров ГРМ и выпуск отечественной системы с характеристиками, не уступающими импортным аналогам.
1. ГИДРАВЛИЧЕСКИЕ РУЛЕВЫЕ МЕХАНИЗМЫ. УСТРОЙСТВО, ПРИНЦИП ДЕЙСТВИЯ, ПАРАМЕТРЫ И ТРЕБОВАНИЯ
1.1.Общие сведения об устройстве гидропривода рулевого управления. Принцип действия
Система рулевого управления включает в себя три основные подсистемы: ГРУ, механизм поворота машины (рулевая трапеция или шарнирно-сочлененная рама) и возмущающие воздействия внешней среды (микрорельеф грунта).
ГРМ является отдельным автономным агрегатом, функциональным механизмом, входящим в состав ГРУ, связанным с исполнительными гидроцилиндрами, питающим насосом и гидробаком только гидролиниями. ГРМ дозирует и распределяет рабочую жидкость к исполнительным гидроцилиндрам пропорционально углу и скорости вращения рулевого колеса. Эта особенность ГРМ обеспечивает полную свободу компоновки на машине, позволяет упростить конструкцию и снизить материалоемкость машины. Применение ГРМ открывает большие возможности в типизации схем ГРУ и унификации их основных элементов. Наряду с этим обеспечивается более легкое управление, и улучшаются условия труда оператора /48, 49/.
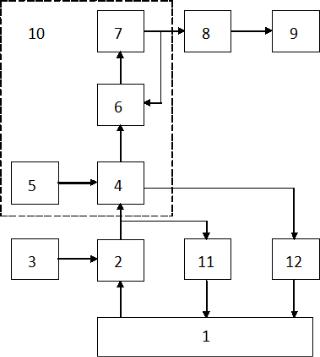
На рис. 1.1 представлена типовая блок-схема ГРУ. Система содержит гидробак 1, источник давления рабочей жидкости 2, приводной двигатель 3, ГРМ 10, исполнительный механизм 8, рулевой привод 9, предохранительное устройство 11 и фильтрующее устройство 12.
ГРМ, как и всякое следящее гидравлическое устройство, состоит из задающего (рулевое колесо) 5, распределительного (золотник) 4, согласующего (гидромотор обратной связи) 7 и дифференциального (гильза) 6 устройств. Дифференциальное устройство связывает между собой задающее, распределительное и согласующее устройства и осуществляет операцию вычитания входного (поворота рулевого колеса) и выходного (поворот вала гидромотора обратной связи) сигналов, передавая разность сигналов распределительному устройству, контролирующему величину рассогласования следящей системы /39/.
Принцип действия ГРУ заключается в следующем: при
отсутствии воздействия на задающее устройство ГРМ поток рабочей жидкости от источника питания поступает в гидробак.
При повороте рулевого колеса срабатывает распределительное устройство и распределяет рабочую жидкость в соответствующую полость исполнительного механизма, соединяя другую полость со сливом. Как видно из блок-схемы (см. рис. 1.1) согласующее устройство включается последовательно в гидролинию исполнительного механизма. Исполнительный механизм воздействует на рулевой привод – происходит поворот машины. При этом рабочая жидкость воздействует на ротор гидромотора обратной связи (согласующее устройство), который через дифференциальное устройство согласует систему, обеспечивая пропорциональное перемещение штокагидроцилиндра (исполнительный механизм) /39, 46/.
Рис. 1.1. Типовая блок-схема гидросистемы рулевого управления
1.2. Обзор существующих конструкций гидравлических рулевых механизмов и анализ тенденций их развития
Анализ отечественных и зарубежных ГРМ показал, что наиболее широкое распространение в СДМ получили одноконтурные и двухконтурные схемы, выполненные на базе насоса-дозатора в
качестве обратной связи между управляющим устройством и исполнительным механизмом /39, 49/.
Приведены и проанализированы некоторые конструкции ГРМ как отечественных, так и зарубежных производителей.
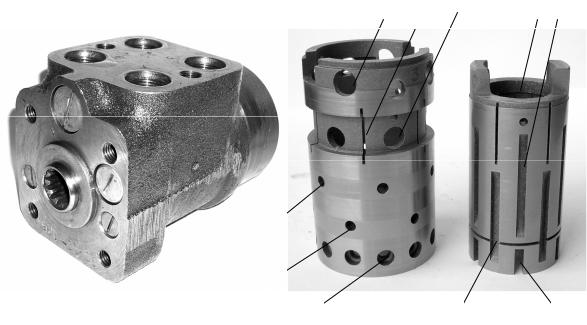
На рис. 1.2 представлен общий вид и конструкция гидрораспределителя рулевого механизма НДП, выпускаемого на заводе ОАО «Омскгидропривод».
1 |
10 |
9 |
|
2 |
8 |
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
5 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
||
а) |
|
|
||||||
Рис. 1.2. Гидравлический рулевой механизм НДП: а общий вид; б конструкция гидрораспределителя
Работа представленной конструкции осуществляется следующим образом.
При повороте рулевого колеса, рабочая жидкость через напорные отверстия 1 попадает в полость золотника 2, из полости золотника через пазы 3 жидкость проходит через отверстия гидромоторного ряда 4 на гидромотор обратной связи, из гидромотора жидкость поступает через отверстия 4 в напорные пазы золотника 5, из которых через напорные отверстия 6 поступает в полости исполнительных гидроцилиндров. Вытесняемая из сливной полости гидроцилиндра жидкость через сливные отверстия 7 проходит в сливные пазы 8, из которых через отверстия 9 уходит на слив в гидробак. Избыток жидкости, не поступивший в гидромотор обратной связи, уходит на слив через каналы разгрузки насоса 10.
Недостатки конструкции:
-выходной вал соединяется с золотником посредством полумуфты или компенсатора, что при износе вызывает повышенные люфты и радиальные биения вала при больших скоростях вращения рулевого колеса;
-напорная полость в корпусе располагается со стороны выходного вала, что вызывает утечки через уплотнения выходного вала;
-жидкость под давлением проходит внутри золотника, при упоре повышенное давление в полости золотника, способствует его радиальной деформации, что может вызвать заклинивание гидрораспределителя.
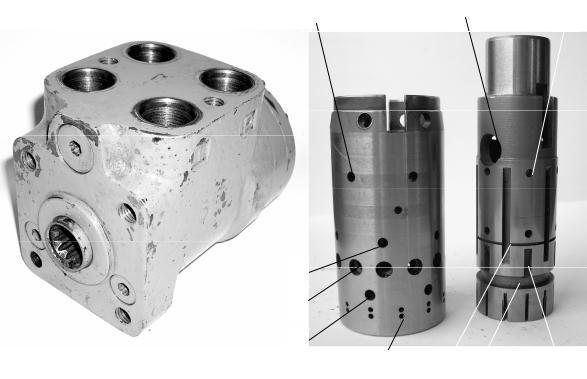
На рис. 1.3 представлены общий вид и конструкция белорусского рулевого механизма, выпускаемого на Могилевском заводе.
7 |
|
|
|
|
|
9 |
|
8 |
|
|
|
|
|
|
6 |
|
|
|
4 |
|
|
|
1 |
5 |
2 |
3 |
10 |
|||
а) |
|
|
б) |
Рис. 1.3. Гидравлический рулевой механизм, выпускаемый Могилевским заводом:
а общий вид; б конструкция гидрораспределителя
Преимущества данного конструктивного исполнения очевидны: выходной вал выполнен заодно с золотником, что исключает