

2629
.pdfРис. 3.39. Аппроксимация зависимостей времени регулирования расхода в ГРУ от величины диаметра отверстий гидромоторного ряда при различных значениях рабочего объема гидромотора
Уравнения регрессии tПП = f(d0), аппроксимирующие зависимости времени регулирования расхода в ГРУ при включении от величины
диаметров отверстий гидромоторного ряда d0 (рис. 3.39): - для q1 = 80 ∙ 10-6 м3:
tПП = –3,254E-06d6 + 0,0006d5 – 0,04687d4 + 1,9222d3 – |
(3.35) |
|
– 44,1164d2 + 537,1968d – |
2711,374 |
|
с величиной достоверности R² = 0,999. |
|
|
- для q2 = 125 ∙ 10-6 м3: |
|
|
tПП = –1,0049E-05d5 + 0,001567d4 – 0,09747d3 + |
(3.36) |
|
+ 3,0205d2 – 46,621d + |
286,688 |
|
с величиной достоверности R² = 0,999. |
|
|
- для q3 = 160 ∙ 10-6 м3: |
|
|
tПП = – 0,0001978d3 + 0,01885d2 – 0,5727d + 5,8518 |
(3.37) |
|
с величиной достоверности R² = 0,999. |
|
- для q4 = 200 ∙ 10-6 м3: |
|
tПП = – 7,4981∙10-5d3 + 0,00711d2 – 0,2115d + 2,353 |
(3.38) |
с величиной достоверности R² = 0,999. |
|
- для q5 = 250 ∙ 10-6 м3: |
|
tПП = 3,4502∙10-6d5 – 0,0005292d4 + 0,03226d3 – |
(3.39) |
– 0,9765d2 + 14,6755d – 87,2095 |
с величиной достоверности R² = 0,999. Определение нелинейной регрессии F = f(γ, q).
Получим уравнения регрессии M = f(γ), аппроксимирующие зависимости коэффициента колебательности расхода в ГРУ при отключении от величины угла зоны нечувствительности
гидрораспределителя (рис. 3.40): - для q1 = 80 ∙ 10-6 м3:
M = 0,3627γ4 – 8,9659γ3 + 81,107γ2 – 317,764γ + 454,43 |
(3.40) |
|
с величиной достоверности R² = 0,997. |
|
|
- для q2 |
= 125 ∙ 10-6 м3: |
|
|
M = – 0,0577γ5 + 1,7614γ4 – 21,025γ3 + |
|
|
+122,628γ2 – 348,851γ + 386,65 |
(3.41) |
с величиной достоверности R² = 0,999. |
|
|
- для q3 |
= 160 ∙ 10-6 м3: |
|
|
M = – 0,0575γ5 + 1,6961γ4 – 19,4812γ3 + |
|
|
+ 108,703γ2 – 293,955 γ+ 307,54 |
(3.42) |
с величиной достоверности R² = 0,996. |
|
|
- для q4 |
= 200 ∙ 10-6 м3: |
|
M = – 0,0506γ5 + 1,4887γ4 – 17,048γ3 + 94,787γ2 – |
|
|
|
– 255,184γ + 265,511 |
(3.43) |

с величиной достоверности R² = 0,995.
- для q5 = 250 ∙ 10-6 м3: |
|
M = – 0,0466γ5 + 1,3691γ4 – 15,6606γ3 + |
|
+86,9521γ2 – 233,723γ + 242,739 |
(3.44) |
с величиной достоверности R² = 0,995.
Получим уравнения регрессии σ = f(γ), аппроксимирующие зависимости величины перерегулирования расхода в ГРУ при включении от величины угла зоны нечувствительности распределителя (рис. 3.41):
-для q1 = 80 ∙ 10-6 м3:
σ= 0,005394γ5 – 0,2401γ4 + 3,6167γ3 – 23,5568γ2 +
+ 63,6584γ – 41,8301 |
(3.45) |
с величиной достоверности R² = 0,983.
Рис. 3.40. Аппроксимация зависимостей коэффициента колебательности расхода в ГРУ при отключении от величины угла зоны нечувствительности при различных значениях рабочего объема
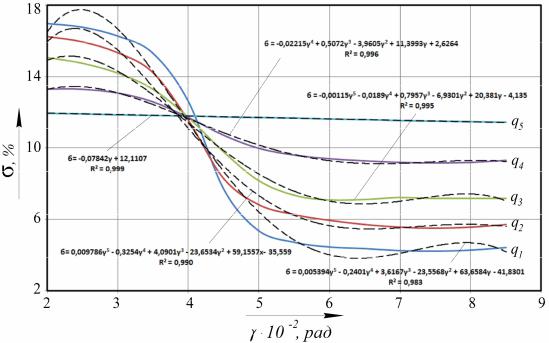
Рис. 3.41. Аппроксимация зависимостей величины перерегулирования расхода в ГРУ при включении от величины угла зоны нечувствительности при различных значениях рабочего объема гидромотора
-для q2 = 125 ∙ 10-6 м3:
σ= 0,009786γ5 – 0,3254γ4 + 4,0901γ3 – 23,6534γ2 +
+ 59,1557γ – 35,559 |
(3.46) |
свеличиной достоверности R² = 0,990.
-для q3 = 160 ∙ 10-6 м3:
σ= – 0,00115γ5 – 0,0189γ4 + 0,7957γ3 –
– 6,9301γ2 + 20,381γ – 4,135 |
(3.47) |
свеличиной достоверности R² = 0,995.
-для q4 = 200 ∙ 10-6 м3:
σ = – 0,02215γ4 + 0,5072γ3 – 3,9605γ2 + 11,3993γ + 2,6264 (3.48)
свеличиной достоверности R² = 0,996.
-для q5 = 250 ∙ 10-6 м3:
σ = – 0,07842γ + 12,1107 |
(3.49) |
с величиной достоверности R² = 0,999.
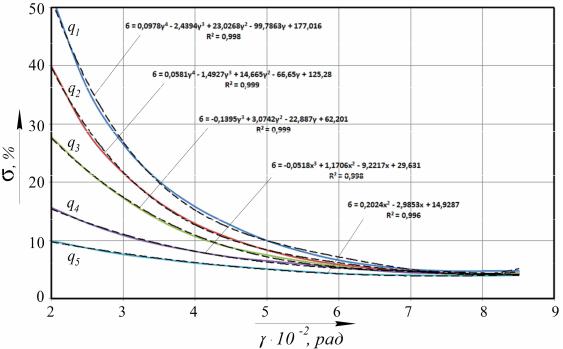
Получим уравнения регрессии σ = f(γ), аппроксимирующие зависимости величины перерегулирования расхода в ГРУ при отключении от величины угла зоны нечувствительности
распределителя (рис. 3.42): - для q1 = 80 ∙ 10-6 м3:
σ = 0,0978γ4 – 2,4394γ3 + 23,0268γ2 – 99,7863γ + 177,016 (3.50)
свеличиной достоверности R² = 0,998.
-для q2 = 125 ∙ 10-6 м3:
σ = 0,0581γ4 – 1,4927γ3 + 14,665γ2 – 66,65γ + 125,28 (3.51)
свеличиной достоверности R² = 0,999.
-для q3 = 160 ∙ 10-6 м3:
σ = – 0,1395γ3 + 3,0742γ2 – 22,887γ + 62,201 |
(3.52) |
свеличиной достоверности R² = 0,999.
-для q4 = 200 ∙ 10-6 м3:
σ = – 0,0518γ3 + 1,1706γ2 – 9,2217γ + 29,631 |
(3.53) |
свеличиной достоверности R² = 0,998.
-для q5 = 250 ∙ 10-6 м3:
σ = 0,2024γ2 – 2,9853γ + 14,9287 |
(3.54) |
с величиной достоверности R² = 0,996.
Уравнение регрессии τ = f(γ), аппроксимирующее зависимость времени чистого запаздывания срабатывания ГРУ от величины угла зоны нечувствительности распределителя выглядит следующим образом:
τ = γ. |
(3.55) |
Получим уравнения регрессии tПП = f(γ), аппроксимирующие зависимости величины времени регулирования расхода в ГРУ при отключении от величины угла зоны нечувствительности
гидрораспределителя (рис. 3.43):
- для q1 = 80 ∙ 10-6 м3: |
|
tПП = 0,002447γ3 – 0,0432γ2 + 0,1712γ + 0,4222 |
(3.56) |
с величиной достоверности R² = 0,999. |
|
- для q2 = 125 ∙ 10-6 м3: |
|
tПП = 0,001242γ3 – 0,0236γ2 + 0,0823γ + 0,5061 |
(3.57) |
с величиной достоверности R² = 0,999. |
|
- для q3 = 160 ∙ 10-6 м3: |
|
tПП = – 0,0002638γ3 + 0,001622γ2 – 0,0384γ + 0,6436 |
(3.58) |
с величиной достоверности R² = 0,999. |
|
- для q4 = 200 ∙ 10-6 м3: |
|
tПП = – 0,00171γ3 + 0,0258γ2 – 0,1537γ + 0,7697 |
(3.59) |
с величиной достоверности R² = 0,999. |
|
Рис. 3.42. Аппроксимация зависимостей величины перерегулирования расхода в ГРУ при отключении от величины угла зоны нечувствительности распределителя при различных значениях рабочего объема гидромотора
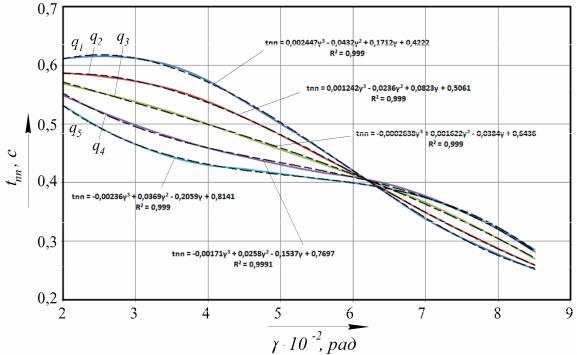
Рис. 3.43. Аппроксимация зависимостей времени регулирования расхода в ГРУ при отключении от величины угла зоны нечувствительности
распределителя при различных значениях рабочего объема гидромотора
- для q5 = 250 ∙ 10-6 м3:
tПП = – 0,00236γ3 + 0,0369γ2 – 0,2059γ + 0,8141 |
(3.60) |
с величиной достоверности R² = 0,999.
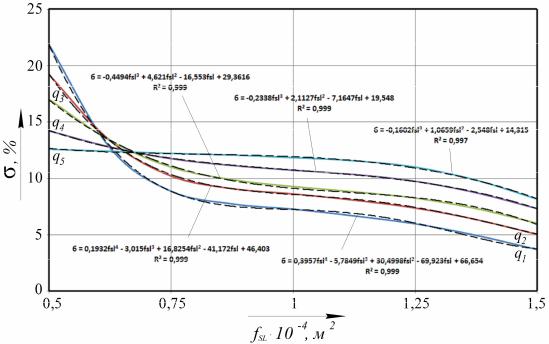
Определение нелинейной регрессии F = f(fSL, q).
Получим уравнения регрессии σ = f(fSL), аппроксимирующие зависимости величины перерегулирования расхода в ГРУ от величины площади проходных сечений каналов разгрузки в гидрораспределителе (рис. 3.44):
-для q1 = 80 ∙ 10-6 м3:
σ= 0,3957fSL 4 – 5,7849fSL 3 + 30,4998fSL 2 – 69,923fSL + 66,654 (3.61)
свеличиной достоверности R² = 0,998.
-для q2 = 125 ∙ 10-6 м3:
σ= 0,1932 fSL 4 – 3,015 fSL 3 + 16,8254 fSL2 – 41,172 fSL + 46,403 (3.62)
свеличиной достоверности R² = 0,999.
-для q3 = 160 ∙ 10-6 м3:
σ = – 0,4494fSL |
3 + 4,621fSL |
2 – 16,553fSL + 29,3616 |
(3.63) |
свеличиной достоверности R² = 0,999.
-для q4 = 200 ∙ 10-6 м3:
σ = – 0,2338fSL |
3 + 2,1127fSL |
2 – 7,1647fSL + 19,548 |
(3.64) |
свеличиной достоверности R² = 0,999.
-для q5 = 250 ∙ 10-6 м3:
σ = – 0,1602fSL |
3 + 1,0659fSL |
2 – 2,548fSL + 14,315 |
(3.65) |
с величиной достоверности R² = 0,997.
Получим уравнения регрессии tПП = f(fSL), аппроксимирующие зависимости величины времени регулирования расхода в ГРУ от величины площади проходных сечений каналов разгрузки в гидрораспределителе (рис. 3.45):
- для q1 = 80 ∙ 10-6 м3:
tПП = – 0,001562fSL |
3 + 0,0219fSL |
2 – 0,1157fSL + 0,3675 |
(3.66) |
свеличиной достоверности R² = 0,999.
-для q2 = 125 ∙ 10-6 м3:
tПП = 0,000754fSL |
3 – 0,002476fSL |
2 – 0,0393fSL + 0,3233 |
(3.67) |
свеличиной достоверности R² = 0,998.
-для q3 = 160 ∙ 10-6 м3:
tПП = 0,0009826fSL |
2 – 0,0359fSL + 0,3248 |
(3.68) |
свеличиной достоверности R² = 0,998.
-для q4 = 200 ∙ 10-6 м3:
tПП = – 0,001723fSL |
3 + 0,00837fSL |
2 – 0,0278fSL + 0,3208 |
(3.69) |
свеличиной достоверности R² = 0,999.
-для q5 = 250 ∙ 10-6 м3:
tПП = – 0,001799fSL 4 + 0,0154fSL 3 – 0,0477fSL 2 + 0,0558fSL + 0,284 (3.70)
с величиной достоверности R² = 0,999.
Рис. 3.44. Аппроксимация зависимостей величины перерегулирования расхода в ГРУ от величины площади проходных сечений каналов разгрузки при различных значениях рабочего объема гидромотора
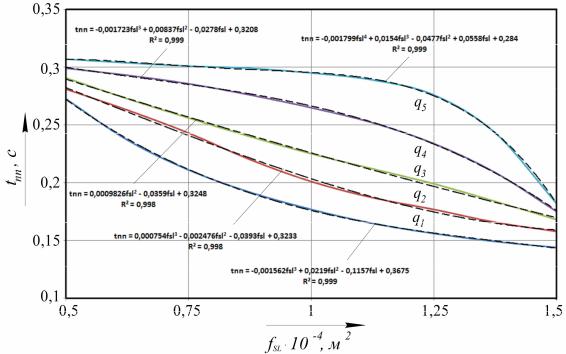
Рис. 3.45. Аппроксимация зависимостей времени регулирования расхода в ГРУ от величины площади проходных сечений каналов разгрузки при различных значениях рабочего объема гидромотора
3.2.3. Решение задачи условной оптимизации
Обзор методов поиска решения в задачах условной оптимизации.
Использование численных методов предполагает знание области возможных изменений решения, и чем эта область уже, то есть чем больше ограничений, тем эффективнее применение численных методов оптимизации. В случае, когда критерий представляет собой линейную функцию решения, а ограничения являются набором линейных неравенств и процесс одношаговый, подобная задача решается методами линейного программирования /9, 10/.
Если критерий и ограничения являются нелинейными функциями решения и процесс одношаговый, то подобная задача решается методами нелинейного программирования. Геометрическое программирование представляет собой математический метод оптимизации, позволяющий решать задачи оптимизации в тех случаях, когда целевая функция и ограничения выражаются нелинейными функциями специального вида /9/.
Методы регулярного поиска хорошо разработаны лишь для