

2629
.pdfM (d0, q) min; |
|
|
||||
25 10 4 м d |
0 |
36 10 |
4м. |
(3.4) |
||
|
|
|
|
|
|
|
- Необходимо выполнить требование по снижению |
||||||
перерегулирования выходной величины в системе: |
|
|||||
σ (d0, q) min; |
|
|
|
|||
25 10 4 м d |
0 |
36 10 4 |
м. |
(3.5) |
||
|
|
|
|
|
|
|
- Должен обеспечиваться поворот машины при минимальном давлении питающего насоса:
p (d0, q) min; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
для q1 |
80 10 6м3:25 10 4 м d0 |
36 10 4 м, |
|
|
|
||||||||||||
|
|
|
|||||||||||||||
для q2 |
125 10 |
6 |
3 |
4 |
м d0 |
36 10 |
4 |
м, |
|
|
|||||||
|
|
м |
:26 10 |
|
|
|
|
||||||||||
для q3 |
160 10 |
6 |
3 |
:26,7 10 |
4 |
м d |
0 36 10 |
4 |
|
|
(3.6) |
||||||
|
|
м |
|
|
м, |
||||||||||||
для q |
4 |
200 10 6 м3:28 10 4 м d |
0 |
36 10 4м, |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
для q |
|
250 10 |
6 |
3 |
|
4 |
м d |
|
36 10 |
4 |
|
|
|
||||
5 |
|
м |
:29,3 10 |
|
0 |
|
м. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
- Необходимо выполнить требование по снижению времени регулирования выходной величины:
tПП (d0, q) min; |
|
(3.7) |
25 10 4м d0 36 10 4 |
|
|
м. |
|
|
|
|
|
Целевые функции показателей качества системы от величины угла зоны нечувствительности гидрораспределителя и граничные условия при включении гидропривода:
- Необходимо выполнить требование по снижению перерегулирования выходной величины в системе:
σВКЛ ( ,q) min ; |
|
|
2 10 2 рад γ 8,5 10 |
2 рад. |
(3.8) |
|
|
|
- Необходимо снижение времени чистого запаздывания при включении:
τ(γ) min ; |
|
|
2 10 2 рад γ 8,5 10 |
2 рад. |
(3.9) |
|
|
|
Целевые функции показателей качества системы от величины угла зоны нечувствительности гидрораспределителя и граничные условия при отключении гидропривода:
- Необходимо выполнить требование по увеличению запасов устойчивости при отключении путем минимизации коэффициента колебательности выходной величины:
M ( ,q) min ; |
|
|
2 10 2 рад γ 8,5 10 |
2 рад. |
(3.10) |
|
|
|
- Необходимо выполнить требование по снижению времени регулирования выходной величины при отключении:
tПП ( ,q) min; |
|
|
2 10 2 рад γ 8,5 10 |
2 рад. |
(3.11) |
|
|
|
- Необходимо выполнить требование по снижению перерегулирования выходной величины в системе при отключении:
σОТКЛ( ,q) min; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
для q |
80 10 6 м3 |
:3,46 10 2 рад γ 8,5 10 2 рад, |
|
|
|||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для q2 |
125 10 |
6 |
м |
3 |
:3,13 10 |
2 |
рад γ 8,5 10 |
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
рад, |
|
|||||||||||||
для q3 |
160 10 6м3 |
:2,75 10 2 рад γ 8,5 10 2 |
|
|
(3.12) |
||||||||||||||||
рад, |
|||||||||||||||||||||
для q4 |
200 10 |
6 |
|
3 |
и q5 250 10 |
6 |
м |
3 |
: |
|
|
|
|
|
|
||||||
|
|
м |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
2 10 |
2 |
рад γ |
8,5 10 |
2 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
рад. |
|
|||||||||
Целевые функции показателей качества системы от величины площади проходных сечений каналов разгрузки в гидрораспределителе и граничные условия:
- необходимо выполнение требования к снижению перерегулирования выходной величины в системе:
σ(fSL,q) min; |
|
|
||
10 4 м2 f |
SL |
1,5 10 4 |
м2. |
(3.13) |
|
|
|
|
|
- необходимо выполнение требования к снижению времени регулирования выходной величины:
tПП(fSL,q) min; |
|
|
||
10 4 м2 f |
SL |
1,5 10 4 |
м2. |
(3.14) |
|
|
|
|
|
Таким образом, поставлена задача оптимизации при помощи задания целевых функций и граничных условий.
3.2.2. Аппроксимация зависимостей
Для получения целевых функций и решения задач оптимизации необходимо аппроксимировать зависимости выходных характеристик, показателей устойчивости и качества ГРУ уравнениями нелинейной регрессии:
-от величины диаметров отверстий гидромоторного ряда гидрораспределителя и рабочих объемов гидромотора обратной связи при включении привода: р(d0, q) (см. рис. 3.21); М(d0, q) (см. рис. 3.9);
σ(d0, q) (см. рис. 3.19) и tПП (d0, q) (см. рис. 3.18);
-от величины угла зоны нечувствительности
гидрораспределителя и рабочих объемов гидромотора обратной связи при включении привода: σ(γ, q) (см. рис. 3.24); τ(γ, q) (см. рис. 3.25) и при отключении: М(γ, q) (см. рис. 3.15); σ(γ, q) (см. рис. 3.28); tПП(γ, q)
(см. рис. 3.29); - от величины площади проходных сечений каналов разгрузки и
рабочих объемов гидромотора обратной связи при включении привода: σ(fSL, q) (см. рис. 3.32); tПП(fSL, q) (см. рис. 3.33).
Обоснование метода аппроксимации.
В предлагаемой работе для аппроксимации вышеперечисленных зависимостей принято решение об использовании метода наименьших квадратов, поскольку он обеспечивает приемлемую
точность и используется в распространенных программных продуктах типа MatCAD или MS EXCEL.
Согласно этому методу наилучшими параметрами а1, а2 … аm в эмпирической зависимости считаются те, для которых сумма квадратов отклонений минимальна /30, 73/:
n |
2 |
|
|
f xi, a1, a2... am |
|
|
|
F(a1, a2... am ) yi |
min. |
(3.15) |
i 1
В силу необходимости условия экстремума функции многих переменных, частные производные этой функции по варьируемым параметрам обращаются в нуль /30, 73/:
|
|
|
F(a1, a2... am ) |
0, |
|||||||
|
|
|
|||||||||
|
|
|
|
|
a1 |
|
|
|
|||
|
|
|
|
|
|
) |
|
||||
|
|
F(a |
1 |
, a |
2 |
... a |
m |
0, |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
a2 |
|
|
||||
|
|
|
|
|
|
(3.16) |
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
. . . . . . . . . |
|||||||||
|
|
|
|
|
, a |
|
... a |
|
) |
|
|
|
|
F(a |
1 |
2 |
m |
0. |
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
am |
|
|
||||
|
|
|
|
|
|
|
|
||||
Частные производные |
функции |
|
F(a1, a2... am )по варьируемым |
||||||||
параметрам: |
|
|
|
|
|
|
|
|
|
|
|
|
F(a1, a2... am ) |
n |
|
|
|
|
|
|
|
|
|
|
2 yi |
f xi, a1, a2... am fa1 xi , a1, a2... am . (3.17) |
|||||||||
|
a |
||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
||
По остальным параметрам а2, а3 … аm частные производные имеют аналогичный вид.
n |
f xi, a1, a2 |
... am fa1 xi, a1, a2... am |
0, |
|
yi |
|
|||
i 1 |
|
|
|
|
|
|
|
. . . . |
(3.18) |
. . . . . . . . . . . . . . . . . . . |
||||
n |
f xi, a1, a2 |
... am fam xi, a1, a2... am |
|
|
yi |
0. |
|
||
|
|
|
|
|
i 1 |
|
|
|
|
Решение этой системы относительно а1, а2 … аm дало искомые наилучшие значения числовых параметров.
Очень важной характеристикой регрессионных зависимостей является мера их достоверности, которая оценивается величиной R2, находящейся в пределах /45/:
0 ≤ R2 ≤ 1. |
(3.19) |
При R2 = 0 величины, для которых определяются уравнения регрессии, являются независимыми; при R2 = 1 имеет место функциональная (а не статистическая) зависимость. Принято считать допустимым R2 ≥ 0,7 /45/.
Известно, что функции с двумя переменными при графическом представлении аппроксимируются поверхностью, однако, даже имея мощный математический аппарат довольно сложно получить приемлемую точность, поскольку аппроксимация поверхностей производится в форме пользователя и описание поверхности полиномом выше второй степени связано с определенными трудностями. Поэтому в предлагаемой работе, так как одна из переменных, а именно, рабочий объем гидромотора обратной связи изменяется дискретно, можно перейти от уравнений множественной регрессии к уравнениям парной регрессии при каждом значении дискретно изменяющейся величины.
Программный продукт MS Excel позволяет находить уравнение парной регрессии для построенного графика y = f(x). Это производится по следующему алгоритму нахождения парной регрессии с помощью программного продукта MS Excel /45/:
1.Ввести массив с исходными данными.
2.Построить зависимость.
3.Указать на аппроксимируемую кривую и вставить линию тренда (рис. 3.35).
4.Исходя из вида статистических данных, выбрать тип регрессии
идля полиномиальной регрессии – степень.
5.Включить отображение полученного уравнения.
6.Оценить достоверность аппроксимации величиной R2. Степень полинома определяется максимальным значением
величины достоверности R2.
Определение нелинейной регрессии F = f(d0,q): Воспользовавшись вышеприведенным алгоритмом, получим
уравнения регрессии p = f(d0), аппроксимирующие зависимости установившихся значений давления в гидрораспределителе от
величины диаметра отверстий гидромоторного ряда d0 (рис. 3.36): - для q1 = 80 ∙ 10-6 м3:
p = 0,0074d3 + 0,7868d2 – 27,9157d + 336,703 |
(3.20) |
с величиной достоверности R² = 0,999.
Рис. 3.35. Диалоговое окно построения линии тренда |
|
- для q2 = 125 ∙ 10-6 м3: |
|
p = 9,0891∙10-5d6 0,0171d5 + 1,3406d4 55,8626d3 + |
|
+ 1306,6544d2 16271,283d + 84320,23 |
(3.21) |
с величиной достоверности R² = 0,999.
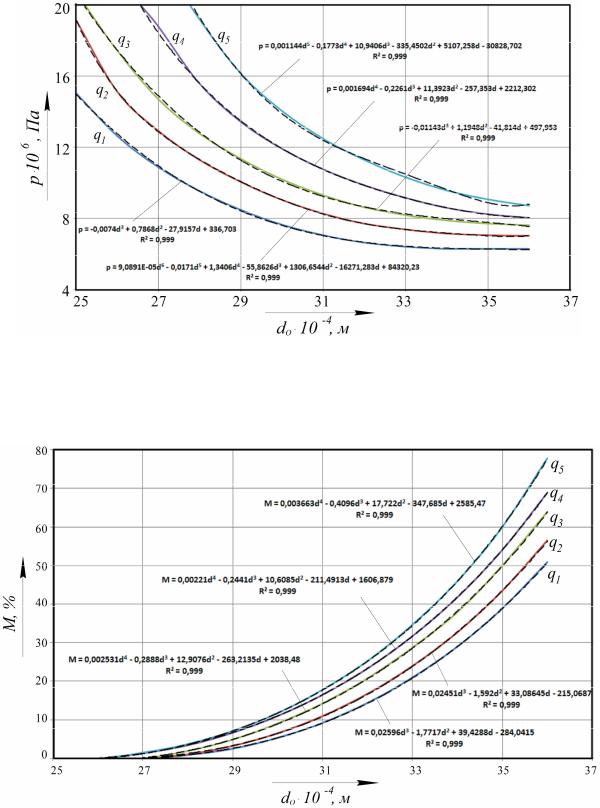
- для q3 = 160 ∙ 10-6 м3: |
|
p = 0,01143d3 + 1,1948d2 41,814d + 497,953 |
(3.22) |
с величиной достоверности R² = 0,999.
Рис. 3.36. Аппроксимация зависимостей давления перед гидрораспределителем от величины диаметра отверстий гидромоторного ряда при различных значениях рабочего объема гидромотора
Рис. 3.37. Аппроксимация зависимостей коэффициента колебательности расхода в ГРУ при включении от величины диаметра отверстий гидромоторного ряда при различных значениях рабочего объема
- для q4 = 200 ∙ 10-6 м3: |
|
p = 0,001694d4 0,2261d3 + 11,3923d2 257,353d + 2212,302 |
(3.23) |
с величиной достоверности R² = 0,999. |
|
- для q5 = 250 ∙ 10-6 м3: |
|
p = 0,001144d5 0,1773d4 + 10,9406d3 – 335,4502d2 + |
|
+ 5107,258d – 30828,702 |
(3.24) |
с величиной достоверности R² = 0,999.
Уравнения регрессии М = f(d0), аппроксимирующие зависимости коэффициента колебательности расхода в ГРУ при включении от
величины диаметра отверстий гидромоторного ряда d0 (рис. 3.37): - для q1 = 80 ∙ 10-6 м3:
M = 0,02596d3 1,7717d2 + 39,4288d 284,0415 |
(3.25) |
свеличиной достоверности R² = 0,999.
-для q2 = 125 ∙ 10-6 м3:
M = 0,02451d3 1,592d2 + 33,08645d 215,0687 |
(3.26) |
свеличиной достоверности R² = 0,999.
-для q3 = 160 ∙ 10-6 м3:
M = 0,002531d4 0,2888d3 + 12,9076d2 263,2135d + 2038,48 (3.27)
свеличиной достоверности R² = 0,999.
-для q4 = 200 ∙ 10-6 м3:
M = 0,00221d4 0,2441d3 + 10,6085d2 211,4913d + 1606,879 (3.28)
свеличиной достоверности R² = 0,999.
-для q5 = 250 ∙ 10-6 м3:
M = 0,003663d4 0,4096d3 + 17,722d2 347,685d + 2585,47 (3.29)
с величиной достоверности R² = 0,999.
Уравнения регрессии σ = f(d0), аппроксимирующие зависимости величины перерегулирования расхода в ГРУ при включении от величины диаметра отверстий гидромоторного ряда d0 (рис. 3.38):
-для q1 = 80 ∙ 10-6 м3:
σ= 0,00132d5 – 0,2057d4 + 12,6497d3 385,2586d2 +
+ 5814,2917d 34807,574 |
(3.30) |
с величиной достоверности R² = 0,998. |
|
- для q2 = 125 ∙ 10-6 м3: |
|
σ = –6,318E-05d6 + 0,01094d5 0,7844d4 + 29,698d3 – |
|
– 625,1638d2 + 6922,663d 31417,31 |
(3.31) |
свеличиной достоверности R² = 0,998.
-для q3 = 160 ∙ 10-6 м3:
σ= 0,0004869d5 – 0,07345d4 + 4,3929d3 – 130,2413d2 +
+1916,225d - 11200,249 (3.32)
свеличиной достоверности R² = 0,999.
-для q4 = 200 ∙ 10-6 м3:
σ= –0,000388d5 + 0,0584d4 – 3,5068d3 + 104,8731d2 –
– 1561,8211d + 9264,613 |
(3.33) |
свеличиной достоверности R² = 0,999.
-для q5 = 250 ∙ 10-6 м3:

σ= – 0,002315d4 + 0,2776d3 – 12,4389d2 + 247,555d – 1838,511 (3.34)
свеличиной достоверности R² = 0,999.
Рис. 3.38. Аппроксимация зависимостей величины перерегулирования расхода в ГРУ от величины диаметра отверстий гидромоторного ряда при различных значениях рабочего объема гидромотора