

2629
.pdfПредставленная на рис. 3.24 зависимость показала, что перерегулирование расхода в системе при включении снижается с увеличением значения зоны нечувствительности до 0,05 – 0,06 рад при использовании гидромотора обратной связи с рабочими объемами q1…q3, при рабочем объеме q4 величина изменяется незначительно, а при q5 – перерегулирование не зависит от величины угла зоны нечувствительности. Связано это с увеличением массы ротора гидромотора и, как следствие, меньшей податливостью всплескам расхода при открытии проходных каналов гидромоторного ряда гидрораспределителя. Необходимо отметить, что значения перерегулирования не превышают 20%, тем не менее, можно дать рекомендации по использованию больших значений углов зоны нечувствительности гидрораспределителя с целью снижения перерегулирования расхода на выходе из системы при включении гидропривода.
Представленная на рис. 3.25 зависимость показала, что время чистого запаздывания прямо пропорционально зависит от величины угла зоны нечувствительности гидрораспределителя, независимо от рабочего объема гидромотора обратной связи. Исходя из представленной зависимости, можно рекомендовать использовать меньшие углы зоны нечувствительности гидрораспределителя с целью снижения времени чистого запаздывания.
Рис. 3.26. Переходные процессы при отключении гидропривода при значениях угла перекрытия каналов гидрораспределителя γ1… γ5

и рабочем объеме гидромотора обратной связи q1 = 80∙10-6 м3
Рис. 3.27. Переходные процессы при отключении гидропривода при значениях угла перекрытия каналов гидрораспределителя γ1… γ5 и рабочем объеме гидромотора обратной связи q5 = 250∙10-6 м3
Из анализа полученных переходных процессов (см. рис. 3.26, 3.27), видно, что зона нечувствительности гидрораспределителя ГРМ оказывает существенное влияние на качество системы при отключении. Важнейшим показателем качества в данном случае является перерегулирование, которое, по сути, при прекращении
воздействия на рулевоеколесо недопустимо. Зависимость |
|
величины |
|||
перерегулирования |
расхода |
от |
величины |
угла |
зоны |
нечувствительности распределителя при различных рабочих объемах гидромотора обратной связи представлена на рис. 3.28.
Как видно из графика (см. рис. 3.28), перерегулирование возрастает при уменьшении значения угла зоны нечувствительности, причем при меньших рабочих объемах гидромотора обратной связи характеристика имеет большую крутизну, связано это с изменениями параметров ротора гидромотора обратной связи при увеличении рабочего объема. Таким образом, для рабочего объема q1 = 80∙10-6 м3 величина перерегулирования достигает допустимого значения при угле зоны нечувствительности 3,46 ∙ 10-2 рад; для q2 = 125∙10-6 м3 –
при 3,13∙ 10-2 рад; для q3 = 160∙10-6 м3 – при 2,75 ∙ 10-2 рад; для q4 = 200∙10-6 м3 и q5 = 250∙10-6 м3 перерегулирование не превышает
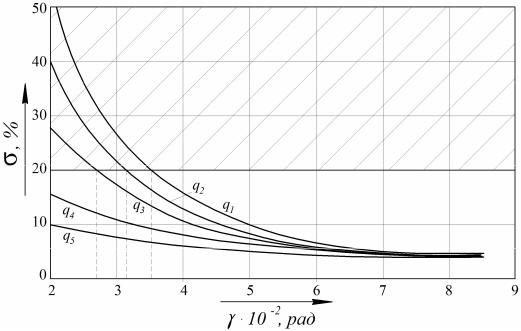
допустимого значения.
Рис. 3.28. Зависимость величины перерегулирования расхода при отключении от величины угла зоны нечувствительности распределителя при различных значениях рабочего объема гидромотора обратной связи q1…q5
Для соответствия системы данному показателю качества рекомендуется применять углы положительного перекрытия каналов гидрораспределителя не менее γ2 = 0,035 рад, а с целью максимального снижения перерегулирования, как отрицательного явления, – не менее γ3 = 0,05 рад.
Важное значение имеет и такой показатель качества, как время регулирования падения расхода на выходе из ГРМ при отключении. Зависимость времени регулирования расхода от величины угла зоны нечувствительности гидрораспределителя при различных рабочих объемах гидромотора обратной связи представлена на рис. 3.29.
При увеличении зоны нечувствительности уменьшается время регулирования выходной величины при различных рабочих объемах гидромотора обратной связи, причем при меньших значениях рабочего объема характеристика имеет большую крутизну, что объясняется различной степенью чувствительности ротора при изменении рабочих объемов. Для увеличения быстродействия системы при отключении можно дать рекомендации применять
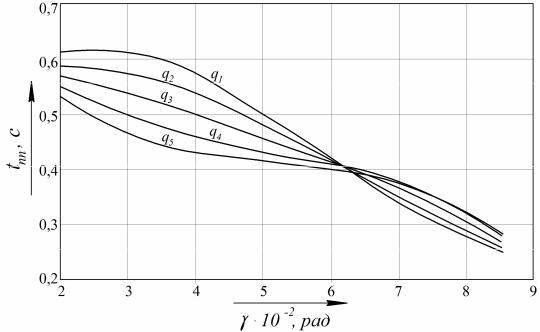
большие углы зоны нечувствительности гидрораспределителя.
Рис. 3.29. Зависимость времени регулирования расхода при отключении от величины угла зоны нечувствительности гидрораспределителя при различных значениях рабочего объема гидромотора обратной связи q1…q5
Таким образом, можно дать следующие рекомендации по углам зоны нечувствительности:
-для обеспечения устойчивости ГРУ при отключении рекомендуется применять углы зоны нечувствительности распределителя не менее 0,02 рад;
-для соответствия допустимому значению перерегулирования при отключении рекомендуется применять углы не менее 0,035 рад;
-обоснование значений углов зоны нечувствительности в полученном диапазоне с целью соответствия показателей устойчивости и качества критерию эффективности и путям рационализации рабочих процессов ГРУ на этапе проектирования является задачей синтеза ГРМ.
Площадь проходных сечений каналов разгрузки, несомненно, влияют на формирование переходных процессов в ГРУ при включении, поэтому для оценки влияния данного параметра на показатели качества системы было необходимо построить графики переходных процессов нарастания расхода на выходе из ГРМ. На рис.
3.30и 3.31 в качестве примера представлены переходные процессы выходной величины при различных значениях площадей проходных
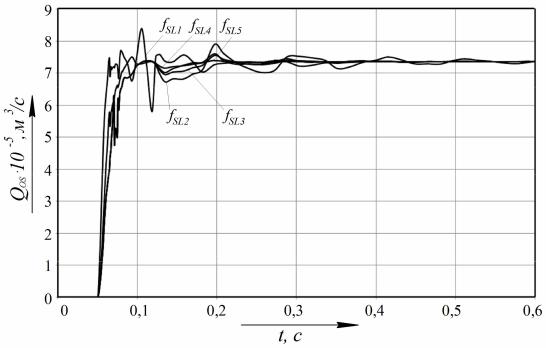
сечений каналов разгрузки fSL1 = 0,5∙10-4 м2; fSL2 = 0,75∙10-4 м2; fSL3 = 10-4 м2; fSL4 = =1,25∙10-4 м2; fSL5 = 1,5∙10-4 м2 при минимальном и максимальном
рабочих объемах гидромотора обратной связи q1 = 80∙10-6 м3 и q5 = =250∙10-6 м3.
Представленные зависимости (см. рис. 3.30, 3.31) показали, что площади проходных сечений каналов разгрузки влияют на качество переходных процессов, возникающих в ГРУ. Для оценки влияния анализируемого параметра на качество протекающих в системе процессов необходимо построить зависимость величины перерегулирования расхода на выходе от величины площади проходных сечений каналов разгрузки при различных значениях рабочего объема гидромотора обратной связи (рис. 3.32).
Исходя из анализа представленной зависимости (см. рис. 3.32), можно сделать вывод, что при уменьшении величины площади проходных сечений каналов разгрузки резко возрастает перерегулирование при меньших рабочих объемах гидромотора, а при увеличении – постепенно уменьшается при всех значениях рабочего объема, что объясняется снижением чувствительности ротора гидромотора вследствие увеличения массы ротора и сил трения в героторной паре.
Рис. 3.30. Переходные процессы в ГРУ при включении привода при значениях площади проходных сечений каналов разгрузки fSL1… fSL5 и рабочем объеме гидромотора обратной связи q1 = 80∙10-6 м3
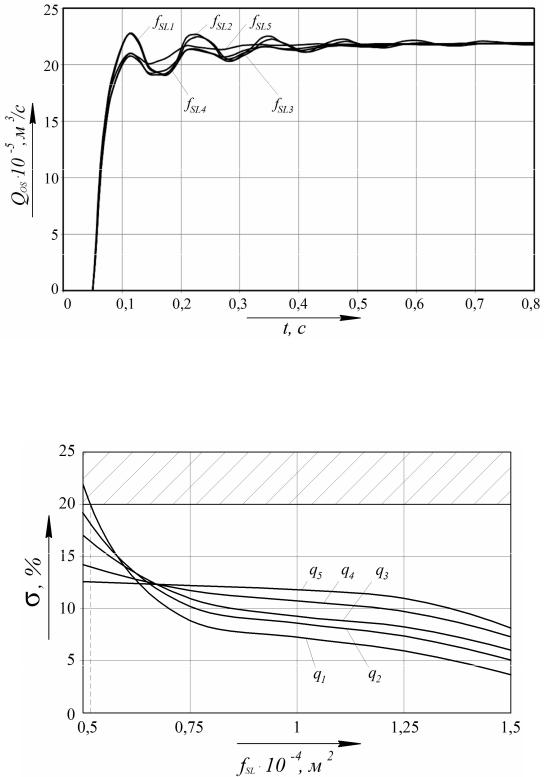
Рис. 3.31. Переходные процессы при включении привода при значениях площади проходных сечений каналов разгрузки fSL1… fSL5 и рабочем объеме гидромотора обратной связи q5 = 250∙10-6 м3
Рис. 3.32. Зависимость величины перерегулирования расхода от величины площади проходных сечений каналов разгрузки при различных значениях рабочего объема
гидромотора обратной связи q1…q5

На рис. 3.33 представлена зависимость времени регулирования выходной величины от варьируемого параметра при различных значениях рабочего объема гидромотора обратной связи. Время переходного процесса уменьшается при увеличении площади проходных сечений каналов разгрузки гидрораспределителя при любых значениях рабочего объема гидромотора обратной связи.
Рис. 3.33. Зависимость времени регулирования расхода от величины площади проходных сечений каналов разгрузки при различных значениях рабочего объема гидромотора обратной связи q1…q5
Таким образом, можно дать следующие рекомендации по выбору значений площадей сечений сливных каналов гидрораспределителя:
-для снижения величины перерегулирования в системе рекомендуется применять большие площади проходных сечений каналов разгрузки;
-для уменьшения времени регулирования рекомендуется также увеличивать площади проходных сечений каналов разгрузки;
-обоснование значений площадей проходных сечений каналов разгрузки в полученном диапазоне с целью соответствия показателей устойчивости и качества критериям эффективности и путям рационализации рабочих процессов ГРУ на этапе проектирования является задачей синтеза ГРМ.
3.2. Методика синтеза гидравлических рулевых механизмов
Суть методики синтеза в общем виде сводится к разработке метода оптимизации, то есть к выбору решения, соответствующего критериям эффективности и путям рационализации рабочих процессов ГРУ, которое производятся на основании сопоставления вариантов по критерию эффективности. Очевидно, что такое сопоставление имеет место при определении области возможных технических решений путем задания альтернатив с последующим расчетом эффективности в каждой из них. В случае же применения моделей математического программирования сравнение вариантов может происходить в процессе выполнения расчетов, а результатом является единственное решение, оптимальное по выбранному критерию эффективности /9, 10/.
Алгоритм оптимизационного синтеза ГРМ (рис. 3.34):
1.Постановка задачи оптимизации: - выбор целевых функций;
-выбор ограничений.
2.Аппроксимация зависимостей выходных характеристик и качественных показателей системы от анализируемых конструктивных параметров с целью получения целевых функций:
- обоснование метода аппроксимации;
-определение уравнений регрессии.
3.Решение задачи условной оптимизации:
- обзор методов поиска решения в задачах условной оптимизации;
- алгоритм перехода к задаче безусловной оптимизации. 4. Решение задачи безусловной оптимизации:
- описание выбранного метода поиска решения в задачах безусловной оптимизации;
- получение рациональных значений анализируемых параметров, как результата решения задачи безусловной оптимизации.
5. Нахождение скорректированного оптимального решения по векторному критерию эффективности.
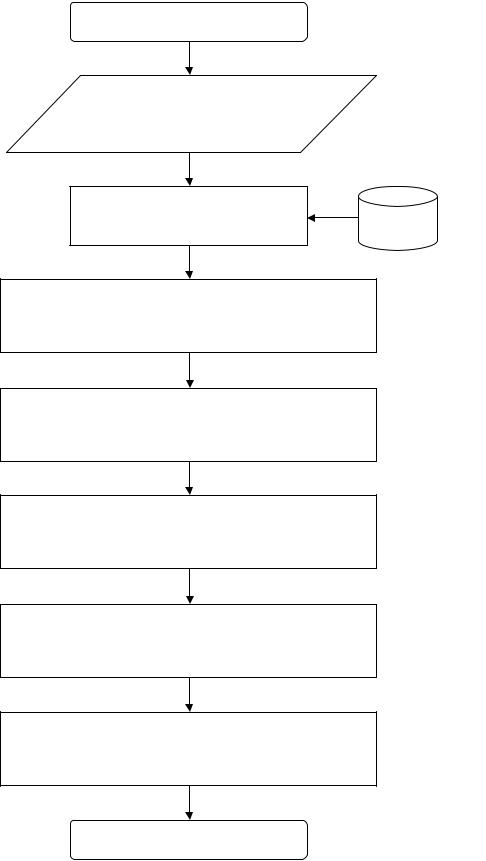
НАЧАЛО
Выявление закономерностей рабочих
процессов ГРУ
Критерий
эффективности
Постановка задачи оптимизации
Аппроксимация выявленных закономерностей методом наименьших квадратов
Переход от задачи условной оптимизации к задаче безусловной оптимизации методом множителей Лагранжа
Решение задачи условной оптимизации методом второго порядка
(метод Ньютона)
Получение оптимальных значений конструктивных параметров ГРМ для каждой целевой функции
Вычисление скорректированных оптимальных значений основных конструктивных параметров ГРМ
КОНЕЦ

Рис. 3.34. Алгоритм оптимизационного синтеза гидравлических рулевых механизмов
3.2.1. Задача оптимизации
Задачи нелинейной оптимизации с точки зрения методов решения делятся на два класса /4, 24, 45/:
- задачи безусловной оптимизации; - задачи условной оптимизации.
Задача безусловной оптимизации представляет собой поиск оптимума целевой функции без всяких дополнительных условий, это записывается /45/:
f(x) → min(max), |
(3.2) |
Такие задачи на практике встречаются крайне редко, но метод их решения служит основой для решения практических задач оптимизации.
Задача условной оптимизации в общем виде записывается в виде /45, 52/:
F = f(xj) → min; gi(xj) ≤ bi;
dj ≤ xj ≤ Dj; (3.3) i = 1…m; j = 1…n.
В систему (3.3) входят три составляющие:
1.Целевая функция показывает, в каком смысле решение должно быть оптимальным, то есть наилучшим, при этом возможны три вида назначения целевой функции: максимизация, минимизация, назначение заданного значения.
2.Ограничения устанавливают зависимостимежду переменными.
3.Граничные условия показывают, в каких пределах могут быть значения искомых переменных в оптимальном решении.
Целевые функции выходных параметров и показателей качества системы от величины диаметров отверстий гидромоторного ряда и граничные условия:
- Необходимо выполнить требование по увеличению запасов устойчивости путем минимизации коэффициента колебательности выходной величины: