

2629
.pdfДля составления расчетной схемы ГРУ необходима гидравлическая схема, изображенная на рис. 2.1 /89/.
Рис. 2.1. Схема гидравлическая принципиальная системы рулевого управления
ГРУ состоит из трехпозиционного шестилинейного распределителя 1 следящего действия, кинематически связанного с рулевым колесом 2 и гидромотором обратной связи 3 и гидравлически связанного первой и третей линиями с исполнительными гидроцилиндрами 4, второй линией с гидробаком 6, пятой линией с питающим насосом 5, обратными клапанами 8 и 9, предохранительным клапаном 7, четвертой и шестой линиями с гидромотором обратной связи 3. В первой и третей линиях трехпозиционного шестилинейного распределителя 1 установлены противовакуумные клапаны 10, 11 и противоударные клапаны 12, 13.
Работа принципиальной схемы ГРУ осуществляется следующим образом.
В нейтральном положении распределителя 1 поток рабочей жидкости от питающего насоса 5 поступает к пятой линии

трехпозиционного шестилинейного распределителя 1 и весь поток рабочей жидкости через вторую линию распределителя 1 поступает в гидробак 6.
При повороте рулевого колеса 2 происходит рассогласование распределителя 1 (например, происходит перемещение золотника вправо). При этом вторая и пятая линии распределителя 1 рассоединяются, а поток рабочей жидкости от питающего насоса 5 через пятую и четвертую линии распределителя 1 поступает на гидромотор обратной связи 3 и далее через шестую и первую линии распределителя 1 в левую полость исполнительного гидроцилиндра 4 и преодолевает приложенную внешнюю нагрузку. Поршень исполнительного гидроцилиндра перемещается вправо. Поток рабочей жидкости из сливной полости исполнительного гидроцилиндра 5 через четвертую и третью линии распределителя 1 поступает в гидробак 5.
На основе рассмотренной гидравлической схемы составлена расчетная схема, которая приведена на рис. 2.2.
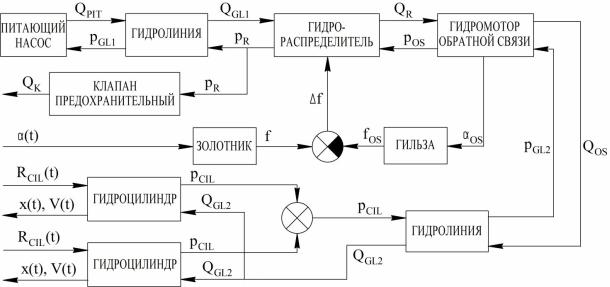
Рис. 2.2. Расчетная схема гидросистемы рулевого управления
Здесь QPIT – подача на выходе из питающего насоса и на входе в гидролинию, соединяющую насос с ГРМ; QGL1 – расход на выходе из гидролинии и на входе в гидрораспределитель; QR – расход на выходе из гидрораспределителя и на входе в гидромотор обратной связи; QSL – расход, поступающий в гидролинию разгрузки; QOS – расход на выходе из гидромотора обратной связи и на входе в гидролинию, соединяющую ГРМ с исполнительными гидроцилиндрами; QGL2 – расход на выходе из гидролинии и на входе в исполнительный гидроцилиндр; RCIL – усилие, приложенное к штоку исполнительного гидроцилиндра, обусловленное силами сопротивления повороту и взаимодействием шин с микрорельефом; pCIL – давление на входе в исполнительный гидроцилиндр и на выходе из гидролинии; pGL2 – давление на входе в гидролинию и на выходе из гидромотора обратной связи; pOS – давление на входе в гидромотор обратной связи и на выходе из гидрораспределителя; pR – давление на входе в гидрораспределитель и на выходе из гидролинии; pGL1 – давление питающего насоса; α(t) – угол поворота рулевого колеса (золотника); αОS(t) – угол поворота ротора гидромотора обратной связи (гильзы); x(t) – перемещение штоков исполнительных гидроцилиндров.
2.1.2. Блок-схема гидросистемы рулевого управления
На основе расчетной схемы формируется блок-схема системы. Блок-схема представляет собой совокупность блоков и связей, которые соответствуют элементам и связям расчетной схемы. Каждый блок блок-схемы представляет собой подсистему или элемент ГРУ, который содержит в себе структурную схему элемента, выполненную на основе дифференциальных уравнений, описывающих этот элемент /31, 32/.
В предлагаемой блок-схеме каждый блок представляет собой гидравлический многополюсник или многомерный динамический объект, поэтому блоки будут иметь несколько присоединительных гидравлических или механических портов, соответствующих входным, выходным, управляющим или возмущающим воздействиям.
Блок-схема ГРУ представлена на рис. 2.3, где f – площадь
проходных сечений каналов гидрораспределителя, обусловленная поворотом золотника; fОS – площадь проходных сечений каналов гидрораспределителя, обусловленная поворотом гильзы; f – регулируемая площадь проходных сечений.
Рис. 2.3. Блок-схема гидросистемы рулевого управления
При математическом описании ГРУ были приняты следующие допущения /19, 31, 32, 53, 54, 56, 58, 81, 95/:
-влияние волновых процессов на динамику привода вследствие сравнительно малой длины магистрали не учитываются;
-температура и вязкость рабочей жидкости, а так же количество нерастворенного воздуха не изменяются в течение переходного процесса;
-коэффициент расхода управляемых дросселей является постоянной величиной;
-неравномерность подачи питающего насоса не учитывается;
-параметры гидроэлементов сосредоточены;
-эксцентриситет в паре «золотник – гильза» не учитывается.
2.1.3. Математическое описание элементов гидросистемы рулевого управления
Математическая модель гидрораспределителя ГРМ.
Гидрораспределитель в совокупности с гидромотором обратной
связи являются управляющим устройством ГРМ, его задачей является не только пуск, остановка или перераспределение потоков рабочей жидкости в системе, но и в совокупности с гидромотором обратной связи – изменение расходов на выходе из системы за счет изменения площадей проходных сечений в зависимости от скорости вращения рулевого колеса.
Гидрораспределитель кранового типа состоит из золотника и гильзы.
При вращении рулевого колеса управляющий золотник смещается на угол α(t), открывая при этом проходные сечения гидромоторного ряда гидрораспределителя, при этом поток рабочей жидкости попадает через гидромотор обратной связи в исполнительный гидроцилиндр, гидромотор обратной связи осуществляет отрицательную обратную связь посредством смещения гильзы золотника распределителя на угол αOS(t), регулируя при этом площади проходных сечений каналов гидрораспределителя f(t) и как следствие расход рабочей жидкости Q(t) на выходе из ГРМ /31, 32, 33/.
Гидрораспределитель представляет собой совокупность местных сопротивлений, кроме того он является нелинейным элементом системы, поэтому целесообразно представить статические характеристики гильзы и золотника распределителя в виде нелинейных зависимостей, а сам распределитель в виде регулируемого дросселя. В паре золотник-гильза при вращении рулевого колеса возникают моменты трения, обусловленные относительной скоростью вращения золотника и гильзы. Момент трения также описывается нелинейной статической характеристикой.
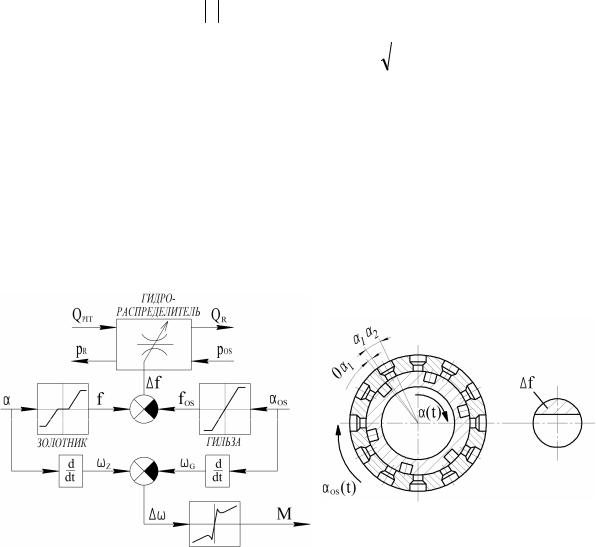
Блок-схема гидрораспределителя представлена на рис. 2.4. Расчетная схема регулирования каналов гидромоторного ряда
гидрораспределителя представлена на рис. 2.5.
Математическая модель гидрораспределителя состоит из математических моделей золотника и гильзы, представленных в виде нелинейных статических характеристик, математической модели регулируемого дросселя и модели трения в распределителе в паре «золотник-гильза».
Статическая характеристика золотника гидрораспределителя описывается следующим уравнением /31/:
fUT , при α α1;
|
|
|
|
|
rZ α |
|
|
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
2 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
r0 |
rZ α |
2r0rZ α rZα |
|
||||||||||
z |
r0 |
|
arccos |
|
|
|
|
|
|
|
||||||||||||
|
1 |
r0 |
|
(2.1) |
||||||||||||||||||
f α |
|
|
|
|
|
|
|
|
|
|
||||||||||||
f |
|
,при α |
|
|
α |
|
α |
|
; |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
UT |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fMAX |
fUT , при |
|
α |
|
α2, |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
где fUT – площадь утечек; fMAX – максимальная площадь проходных сечений; z – число отверстий гидромоторного ряда; r0 – радиус отверстий гидромоторного ряда; rZ – радиус золотника.
Рис. 2.4. Блок-схема гидрораспределителя |
Рис. 2.5. Расчетная схема |
гидравлического рулевого механизма |
регулирования проходных |
|
сечений гидромоторного ряда |
Статическая характеристика гильзы гидрораспределителя описывается следующим уравнением /31/:

|
|
2 |
|
|
|
rZα |
r0 |
rZα |
|||
z |
r0 |
arccos 1 |
|
|
|||||||
|
|||||||||||
|
|
|
|
|
|
r0 |
|
|
|||
|
fUT ,при |
|
α |
|
αOS ; |
|
|
||||
|
|
|
|
||||||||
fOS αOS |
|
|
|
|
|||||||
 2r0rZ α rZ α 2
2r0rZ α rZ α 2
(2.2)
fOS MAX fUT , при α αOS .
Нелинейная зависимость (2.1) представлена на рис. 2.6, где α1…+α1 – зона нечувствительности гидрораспределителя; |α1…α2| – рабочая зона гидрораспределителя; |α2…∞| – зона насыщения.
Рис. 2.6. Зависимость площади проходных сечений гидромоторного ряда гидрораспределителя от угла поворота золотника относительно гильзы
Гидрораспределитель описывается уравнениями расходов через регулируемый дроссель с учетом утечек рабочей жидкости через кольцевое сечение /19, 31, 32, 34, 53, 54, 55, 56, 58/:
QR2 = QR1 – QSL – QUT;
|
|
|
dQR2 |
|
|
μ Δf sign(pR1 |
pR2 ) |
|
||||||||||||||||||
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
dt |
|
2 |
ρ |
1 |
|
p |
|
p |
|
|
Q |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ж |
|
|
|
|
|
R1 |
|
|
R |
2 |
|
|
|
R2 |
|
|
|
|
dQSL |
B μ fSL |
|
|
|
QSL ; |
|||||||||||||||||
|
|
|
|
|
2 ρЖ1 pR1 |
|||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
π r r r 3 |
|
|
|
|
|
3 |
|
|
|
pR1 |
pR2 , |
|||||||||||||
QUT |
|
G G |
Z |
|
1 |
|
|
|
ε2 |
|
||||||||||||||||
|
|
|
|
2 |
||||||||||||||||||||||
|
|
|
|
6 Ж L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
(2.3)
(2.4)
(2.5)
(2.6)
где QR1 и QR2 – расходы жидкости на входе и выходе гидрораспределителя; QSL – расход жидкости, поступающей на слив; pR1 и pR2 – давления на входе и выходе из гидрораспределителя соответственно; B – коэффициент, учитывающий инерционность столба жидкости; μ – коэффициент расхода; ρЖ – плотность рабочей жидкости; rG – радиус гильзы; ν – кинематическая вязкость жидкости; L – длина сопряжения; ε – коэффициент эксцентриситета.
Математическая модель трения в гидрораспределителе.
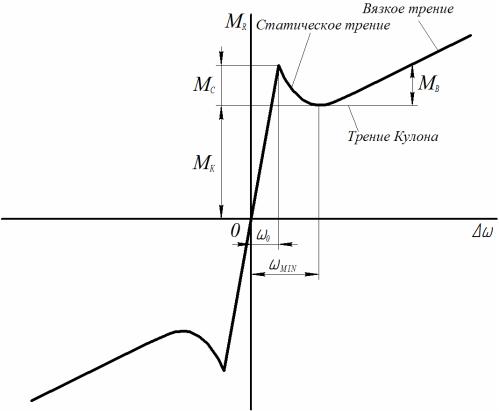
Математическая модель трения описывает силы трения в паре «золотник-гильза». Момент трения МR моделируется как функция относительной скорости ω и является суммой момента статического трения МС, момента трения Кулона МК и момента вязкого трения МВ, как показано на рис. 2.7.
Рис. 2.7. Зависимость момента трения в гидрораспределителе от относительной угловой скорости
Статическое трение – это ниспадающая характеристика, возникающая при низких угловых скоростях. Трение Кулона приводит к постоянному моменту трения при любой угловой

скорости. Вязкое трение противостоит вращению моментом, пропорциональным относительной скорости.
В предлагаемой модели введен небольшой конечный порог угловой скорости ω0, в пределах которого момент трения возрастает прямо пропорционально угловой скорости с коэффициентом пропорциональности kПР = МС + МК / ω0. Этот параметр введен, чтобы повысить вычислительную эффективность при переходе значений относительных угловых скоростей из отрицательной области в положительную и наоборот, поскольку момент трения при механическом контакте тел с распределенной массой в момент, когда
ω= 0 не может мгновенно изменить свое значение с (МС + МК) на
–(МС + МК). Было доказано экспериментально, что значение
скоростного порога в диапазоне между 10-3 и 10-5 рад/с – хороший компромисс между точностью и вычислительной надежностью и эффективностью. Необходимо отметить, что на крутящий момент трения, вычисленный с этим допущением, фактически не влияет относительное вращение, когда момент понижается ниже уровня трения страгивания. Тела будут вращаться друг относительно друга с очень маленькой скоростью, пропорциональной действующему крутящему моменту /31/.
Трение в гидрораспределителе описывается уравнениями /31/:
(МК + МС∙exp(-cV|Δω|))∙signΔω + hRΔω, при |Δω| ≥ ω0;
МR(Δω) = |
Δω |
hRω0 (МК МС exp( cV ω0 )) |
, при |
|
Δω |
|
ω ; |
(2.7) |
||
|
|
|||||||||
|
|
|
||||||||
|
|
|
|
|
||||||
|
|
ω0 |
|
|
|
0 |
|
|||
|
|
|
|
|
|
|
||||
|
|
Δω = ωZ – ωG ; |
(2.8) |
|||||||
|
|
Δω |
dΔ |
, |
(2.9) |
|||||
|
|
|
||||||||
|
|
|
dt |
|
||||||
где ωZ, ωG – абсолютные угловые скорости золотника и гильзы гидрораспределителя соответственно; Δω – относительная угловая скорость; М – крутящий момент трения; МС – момент статического трения; МК – момент трения Кулона; сV – коэффициент перехода между статическим и трением Кулона; hR – коэффициент вязкого трения распределителя; ω0 – порог относительной угловой скорости.
Коэффициент cV используется для перехода между статическим и трениями Кулона. Его значение назначается из следующих соображений: статический компонент трения достигает приблизительно 95 % от его установившегося значения при скорости 3/cV, и 98 % при скорости 4/cV, которое позволяет установить относительное значение cV ≈ 4/ωMIN, где ωMIN – относительная скорость, при которой крутящий момент трения принимает минимальное значение /31/.
Выражения (2.1)…(2.9) с учетом принятых допущений позволяют представитьгидрораспределительввидеструктурнойсхемы(рис.2.8).