

2629
.pdfВ качестве возмущающего воздействия, возникающего в результате взаимодействия ходового оборудования колесной машины с внешней средой, принимаются координаты микрорельефа.
Математическое моделирование процесса поворота машины проводилось в приложении SimMechanics. SimMechanics – это отдельная библиотека пакета Simulink среды MATLAB, предназначенная для моделирования механического движения твердых тел. Основное ее назначение – это моделирование пространственных движений твердотельных машин и механизмов на стадии инженерного проектирования, используя законы теоретической механики /94/.
При использовании библиотеки SimMechanics, интегрированной в Simulink, могут быть использованы все возможности системы MATLAB, в частности, добавление к модели механической системы компонентов из других библиотек Simulink и расширений системы.
К достоинствам реализации моделирования механических систем при помощи SimMechanics в Simulink, могут быть отнесены простота создания моделей не слишком подготовленными пользователями и высокая скорость вычислений при моделировании движений многозвенных объектов с большим числом степеней свободы в больших перемещениях. Механическая система представляется связанной блочной диаграммой, подобно другим моделям Simulink, с использованием блоков из библиотеки SimMechanics. В качестве задаваемых параметров механических блоков выступают массовоинерционные свойства тел (звеньев механизмов), координаты характерных точек тел (такие, как центры масс, точки приложения внешних и управляющих воздействий, точки присоединения шарниров и сочленений). В отличие от других блоков Simulink, которые выполняют математические действия или обрабатывают сигналы, механические блоки SimMechanics представляют непосредственно физические тела или связи между ними. Моделируемые механические системы могут состоять из любого количества твердых тел, связанных шарнирами, имеющими поступательные и вращательные степени свободы. Возможно
наложение кинематических ограничений, сил и вращающих моментов, взаимных траекторий движения тел /94/.
2.3.1. Выбор и обоснование расчетной схемы
Имитационная модель процесса поворота базируется на следующих допущениях /25/:
-машина представлена в виде двух шарнирно-сочлененных тел, которые могут перемещаться в плоскости, с которой связаны голономными и стационарными связями в виде тел Фохта;
-полурамы представляют собой абсолютно жесткие тела с равномерно распределенной массой;
-поворот машины происходит таким образом, что точка контакта одного из колес передней полурамы трактора является центром поворота этого звена;
-люфты и силы сухого трения в шарнирах отсутствуют;
-колебания полурам в плоскости малы.
На рис. 2.21 изображена расчетная схема шарнирно-сочле- ненной машины. В качестве ее элементов представлены:
-передняя полурама погрузчика с центром масс в точке A;
-задняя полурама погрузчика с центром масс в точке В.
Машина рассматривается в инерциальной системе координат O0X0Z0, начало которой совпадает с центром пятна контакта колеса передней полурамы, остающемся неподвижным при повороте.
Положение полурам в инерциальной системе координат определяется положением соответствующих локальных систем координат, которые связаны соответственно: O1X1Z1 – с передней полурамой; O2X2Z2 – с задней полурамой.
Малые перемещения полурам, обусловленные упруго-вязкими взаимодействиями шин с микрорельефом грунта характеризуются коэффициентами жесткости с1…с5 и коэффициентами вязкости d1…d5.
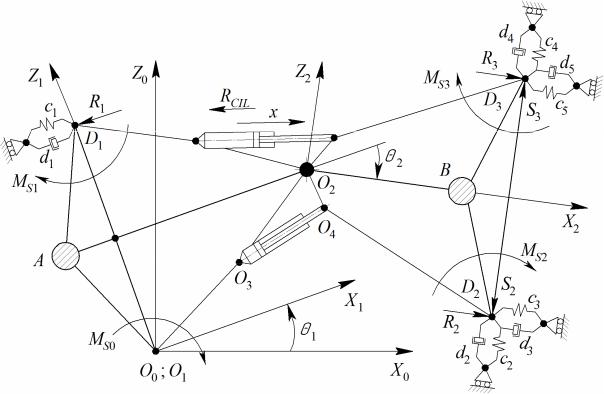
Усилия Ri, Si и моменты MSi сопротивления повороту моделировались в среде Simulink и подводились к шарнирам, соответствующим точкам контакта колес с землей.
На рис. 2.22 представлена принципиальная схема связей для построения Simulink-модели процесса поворота машины с шарнирно-
сочлененной рамой.
Передняя, задняя полурамы машины, а также корпус и шток исполнительных гидроцилиндров реализованы в SimMechanics блоком «Body» тело. Блок «Body» представляет собой твердое жесткое тело (отдельное звено механизма, движения которого моделируются) с определенными пользователем параметрами.
Рис. 2.21. Расчетная схема поворота машины с шарнирно-сочлененной рамой
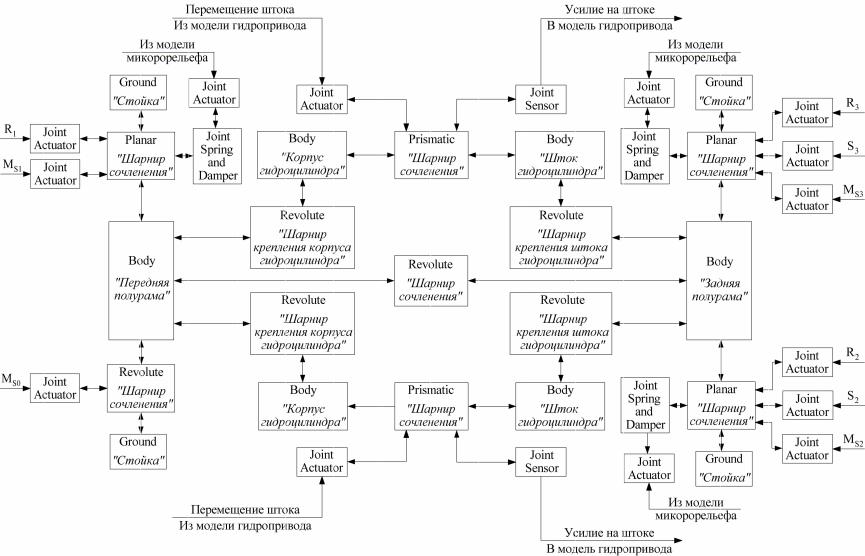
Рис. 2.22. Принципиальная схема связей для построения Simulink-модели процесса поворота машины с шарнирно-сочлененной рамой
2.3.2.Описание элементов машины
Вкачестве задаваемых параметров выступают:
-масса тела, которая может быть выражена в различных единицах;
-тензор инерции тела относительно его центра масс,
представляющий собой матрицу размером 3 3:
|
Jix |
0 |
0 |
|
|
|
|
H |
|
0 |
Jiy |
0 |
|
, |
(2.59) |
|
|
||||||
|
|
0 |
0 |
|
|
|
|
|
|
Jiz |
|
|
|||
где Jix, Jiy, Jiz, – осевые моменты инерции тела относительно осей собственной локальной системы координат, связанной с его центром масс;
-декартовы координаты характерных точек, связанных с телом. В частности, обязательно должны быть указаны координаты центра масс тела, и при необходимости – координаты произвольного числа других характерных точек, таких как центры шарниров, связанных с данным телом, или точки приложения внешних сил и моментов.
-указывается имя системы координат (характерной точки), от начала которой отсчитываются координаты текущей характерной точки. Как минимум одна характерная точка (любая, в том числе это может быть и центр масс тела) должна быть задана в системе координат WORLD, либо в системе координат ADJOINING. Это необходимо, чтобы связать данное тело с соседними неподвижными или подвижными телами. Система координат WORLD – это инерциальная неподвижная система, связанная с Землей, а система координат ADJOINING связана с шарниром, присоединенным к телу (с той частью шарнирного сочленения, которая жестко связана с рассматриваемым телом);
-вектора углов поворота систем координат (начальные условия). Координатные оси любой системы координат в SimMechanics соответствуют правой Эйлеровой системе координат.
Характерные точки передней полурамы:
О0,О1 – точки, связанные с колесом передней полурамы, которое при повороте остается неподвижным и является центром поворота, соединяется через шарнир «Revolute» с землей, кроме того данная точка является началом инерциальной системы координат и
локальной системы координат, связанной с передней полурамой машины; D1 – точка связанная с подвижным колесом передней полурамы, соединяется через шарнир «Planar» с землей, A – центр тяжести передней полурамы, О3 – точка крепления корпуса гидроцилиндра через шарнир «Revolute» к полураме; О2 – шарнир сочленения передней и задней полурам и начало локальной системы координат, связанной с задней полурамой.
Характерные точки задней полурамы:
D2, D3 – точки контакта задних колес с землей, В – центр тяжести задней полурамы, О2 - шарнир сочленения передней и задней полурам, О4 - точка крепления штока гидроцилиндра через шарнир
«Revolute» к полураме.
Характерные точки исполнительных гидроцилиндров:
О3, О4 – точки крепления гидроцилиндров к передней и задней полурамам соответственно.
Для блока «Ground» (стойка) необходимо задать вектор координат [X;Y;Z] одной неподвижной точки механизма относительно глобальной инерциальной системы координат, вектор сил тяжести вида [X;Y;Z], размерность механизма (2-х мерная, либо 3-х мерная схема), способ анализа, тип решающего устройства ограничения, допуски линеаризации, установка/снятие визуального наблюдения
/94/.
Для шарниров необходимо задать оси, вдоль которых происходит перемещение для поступательных примитивов, и оси, вокруг которых происходит вращение для вращательных примитивов, а также количество дополнительных портов для присоединения «Joint Actuator», «Joint Sensor» и упруго-вязкого элемента /94/.
Для блока «Joint Actuator» необходимо задать тип возбуждающего воздействия: силовое воздействие или движение. Для возбуждения движения относительное движение частей примитива должно быть подано в виде векторного сигнала Simulink вида [перемещение; скорость; ускорение] на вход блока «Joint Actuator». В случае силового возбуждения на вход подается скалярный сигнал /94/.
Для блока «Joint Sensor» необходимо задать тип выходного сигнала, это может быть угол поворота части примитива, соединенного с последующим телом, относительно его части, соединенной с предыдущим телом; относительная угловая скорость; относительное угловое ускорение; полный момент сил, вызывающий относительное угловое ускорение; позиция – перемещение части
примитива, соединенной с последующим телом, относительно его части, соединенной с предыдущим телом; относительная скорость; относительное ускорение; полная сила, вызывающая относительное ускорение; кватернион – вектор из четырех компонент, описывающих текущее угловое положение частей сферического примитива; момент реакции относительно оси примитива; сила реакции вдоль оси примитива /94/.
Для блока «Joint Spring & Damper» должны быть заданы значения коэффициента упругости с, коэффициента вязкого трения d и линейного/углового расстояния равновесия между частями примитива /94/.
2.3.3. Математическая модель сопротивлений в зоне контакта колес с поверхностью, возникающих в процессе поворота машины
Влияние внешней среды на процесс поворота машины отражено внешними силами и моментами, действующими на полурамы погрузчика, приложенными к точкам контакта шин с поверхностью земли.
В предложенной имитационной модели поворота взаимодействие шин с землей моделируется при помощи шарнира «Planar», имеющего две поступательные и одну вращательную степени свободы. Поэтому для расчета усилия поворота на штоках исполнительных гидроцилиндров к двум поступательным примитивам шарнира «Planar» через блок «Joint Actuator» необходимо подводить продольные и поперечные реакции грунта на колеса, а к вращательному – моменты сопротивления колес. Для расчета возмущающих усилий на штоках к одному из поступательных примитивов шарнира «Planar» через блок «Joint Spring & Damper»
приводятся координаты микрорельефа из рабочей области Matlab, сгенерированные заранее (см. рис. 2.22).
Продольная реакция грунта на колеса определяется по формуле
/97/:
Ri = Gi ∙ ψi, |
(2.60) |
где Gi – нагрузка, приходящаяся на колесо; ψi – коэффициент использования сцепного веса.

Кривые коэффициента использования сцепного веса в зависимости от буксования шин СДМ могут быть получены пересчетом из зависимости буксования от тяговой силы. Эти кривые могут быть аппроксимированы линейными отрезками /97/.
Поперечная реакция грунта на колеса, согласно гипотезе Рокара, справедливой для случая, когда оси колес параллельны плоскости дороги вычисляется по формуле /97/:
Si = KУi ∙ Gi, |
(2.61) |
где KУi – удельный коэффициент сопротивления боковому уводу шин. Величина коэффициента сопротивления боковому уводу шин зависит от угла увода колес i-й секции и коэффициента буксования, а также соотношения сцепных качеств шины в продольном и боковом
направлениях.
Момент сопротивления повороту колеса определяется по формуле /97/:
MSi = М1 + М2, |
(2.62) |
где М1 – момент сопротивления, возникающий в результате трения между опорными поверхностями колес и грунта; М2 – момент сопротивления, возникающий за счет сдвига почвы боковыми поверхностями колес и грунтозацепами.
Момент сопротивления, возникающий в результате трения между опорными поверхностями колес и грунта определяется по формуле /97/:
|
|
π |
|
|
|
|
|
M1 qК |
|
|
a2 b2 , |
(2.63) |
|||
12 |
|||||||
|
|
|
|
|
|||
где φ – коэффициент трения шины о грунт; а – длина пятна контакта; b – ширина пятна контакта; qК – давление в зоне контакта шины с опорной поверхностью.
qК = pШ Z ∙ A; |
(2.64) |
|||
a |
G |
|
|
|
qKb , |
(2.65) |
|||
|
||||
где pШ – давление в шине колеса; z – показатель степени; А – показатель жесткости.
Момент сопротивления, возникающий за счет сдвига почвы боковыми поверхностями колес и грунтозацепами определяется по
эмпирической формуле /97/:
М2 = krKh2 (0,32+0,5h0,35), (2.66)
где k – коэффициент, зависящий от эластичности шины; rK – свободный радиус колеса; h – глубина колеи.
Таким образом, выражения (2.60…2.66) позволили описать усилия и моменты сопротивления, возникающие в зоне контакта шин с землей, которые использовались в качестве входных сигналов при разработке имитационной модели процесса поворота. Переменные коэффициенты, входящие в состав выражений (2.60…2.66) в среде Simulink моделируются путем задания сигнала, изменяющегося по выявленному закону либо стохастически.
2.3.4. Обобщенная имитационная модель и визуализация процесса поворота
После ввода всех необходимых параметров блоков SimMechanics и соединения их в соответствии с принципиальной схемой связей (см. рис. 2.22) была получена обобщенная модель поворота в среде SimMechanics, представленная на рис. 2.23.
Модель работает следующим образом:
С помощью блока Joint Actuator, присоединенного к шарниру, обеспечивающего поступательную степень свободы штока и корпуса гидроцилиндра относительно оси гидроцилиндра, передается сигнал перемещения штока из модели гидропривода (выходной параметр гидроцилиндра х). Движение штока и корпуса гидроцилиндра передается через вращательные шарниры О3 и О4 на полурамы и машина поворачивается относительно вращательных шарниров О1 и О2. Однако в процессе поворота машины в зонах контакта шин с поверхностью земли возникают силы и моменты сопротивления, обусловленные трением, боковыми уводами, массами полурам, геометрическими параметрами пятна контакта, давлением в шинах и т.д. Поэтому к двум поступательным примитивам шарниров «Planar» связывающих характерные точки машины D1…D3 с землей через блоки «Joint Actuator» подводятся продольные и поперечные реакции грунта на колеса, ак вращательному– моменты сопротивления поворотуколес.
Упруго-вязкое взаимодействие шин с микрорельефом грунта
моделируется телами Фохта. Для этого к одному из поступательных примитивов шарниров «Planar» через блоки «Joint Actuator», в качестве возмущающих воздействий, приводится сигнал, формирующий координаты микрорельефа, из модели стохастических возмущающих воздействий. Тела Фохта преобразовывают этот сигнал в дополнительные возмущающие усилия в шарнирах «Planar».