

2629
.pdfгидромоторного ряда и при значениях этого же параметра ряда существующих конструкций. Для этого были построены зависимости давления питающего насоса, коэффициента колебательности расхода на выходе, величины перерегулирования и времени регулирования от величины рабочего объема гидромотора обратной связи оптимизированной, зарубежной и импортной систем (рис. 3.52).
Рис. 3.52. Зависимости численных значений целевых функций от величины рабочего объема гидромотора обратной связи
Полученные зависимости подтвердили необходимость оптимизации диаметров отверстий гидромоторного ряда. Доказано, что численные значения целевых функций при существующих значениях диаметров отверстий гидромоторного ряда отечественного ГРМ выше, чем при оптимизированных. Значения целевых функций при существующих значениях диаметров отверстий гидромоторного ряда ГРМ импортного производства и при оптимизированных значениях рассматриваемого параметра практически совпадают. Максимальные расхождения численных значений целевых функций зарубежных и отечественных ГРМ по сравнению с оптимизированной системой сведены в табл. 3.2.
Обоснование оптимальных значений углов зоны нечувствительности гидрораспределителя с целью соответствия показателей качества ГРУ путям рационализации рабочих процессов.
Результаты оптимизации величины угла зоны
нечувствительности гидрораспределителя с целью соответствия величины перерегулирования при включении привода целевой функции (3.8): при q1 = =80 ∙ 10-6 м3 оптимальные значения углов зоны нечувствительности принимают значения γ* = 6,492 ∙ 10-2 рад со значением целевой функции σVKL1 = 3,877 %; при q2 = 125 ∙ 10-6 м3 –
значения γ* = 6,505 ∙ 10-2 |
рад со значением целевой функции |
σVKL2 = 5,461 %; при q3 = |
=160 ∙ 10-6 м3 – значения γ* = 6,513 ∙ 10-2 |
рад со значением целевой функции σVKL3 = 6,942 %; при q4 = 200 ∙ 10-6 м3 – значения γ* = =6,757 ∙ 10-2 рад со значением целевой функции σVKL4 = 9,174 %; при q5 = 250 ∙ 10-6 м3 – значения γ* = 8,5 ∙ 10-2 рад со значением целевой функции σVKL5 = 11,468 %.
Таблица 3.2
Максимальные расхождения численных значений целевых функций при существующих значениях диаметров отверстий гидромоторного ряда по сравнению с оптимизированными значениями
Целевые функции |
Зарубежная система, % |
Отечественная система, % |
p ∙ 106, Па |
2,36 |
6,78 |
М, % |
3,17 |
20,71 |
σ, % |
5,23 |
7,25 |
tПП, с |
2,11 |
4,86 |
Результаты оптимизации величины угла зоны нечувствительности гидрораспределителя с целью соответствия времени чистого запаздывания при включении привода целевой функции (3.9): при всех значениях рабочего объема гидромотора обратной связи оптимальные значения углов зоны нечувствительности принимают значения γ* = =2 ∙ 10-2 рад со значением целевой функции τ = 2 ∙ 10-2 с.
Результаты оптимизации величины угла зоны нечувствительности гидрораспределителя с целью соответствия величины перерегулирования при отключении привода целевой функции (3.12): при q1 = =80 ∙ 10-6 м3 оптимальные значения углов зоны нечувствительности принимают значения γ* = 7,842 ∙ 10-2 рад со значением целевой функции σOTKL1 = 4,03 %; при q2 = 125 ∙ 10-6 м3 – значения γ* = 7,991 ∙ 10-2 рад со значением целевой функции σOTKL2 = 4,02 %; при q3 = 160 ∙ 10-6 м3 – значения γ* = 8,347 ∙ 10-2 рад со значением целевой функции σOTKL3 = 4,271 %; при q4 = 200 ∙ 10-6 м3 и q5 = 250 ∙ 10-6 м3 – значения γ* = 8,5 ∙ 10-2 рад со значениями целевой
функции σOTKL4 = 4,077 и σOTKL5 = 4,042 %.
Результаты оптимизации величины угла зоны нечувствительности гидрораспределителя с целью соответствия времени регулирования при отключении привода целевой функции (3.11): при всех значениях рабочего объема гидромотора обратной связи оптимальные значения углов зоны нечувствительности принимают значения γ* = =8,5 ∙ 10-2 рад со значениями целевой функции tПП1 = 0,252 с; tПП2 = =0,259 с; tПП3 = 0,27 с; tПП4 = 0,286 с; tПП5 = 0,281 с.
Результаты оптимизации величины угла зоны нечувствительности гидрораспределителя с целью соответствия коэффициента колебательности при отключении привода целевой функции (3.10): при q1 = 80 ∙ 10-6 м3 оптимальные значения углов зоны нечувствительности принимают значения γ* = 3,971 ∙ 10-2 рад;
при q2 = 125 ∙ 10-6 м3 – значения γ* = 3,594 ∙ 10-2 рад; при q3 = 160 ∙ 10-6
м3 – значения γ* = =3,226 ∙ 10-2 рад; при q4 = 200 ∙ 10-6 м3 – значения γ* = 3,22 ∙ 10-2 рад; при q5 = 250 ∙ 10-6 м3 – значения γ* = 3,203 ∙ 10-2 рад со значениями целевой функции М = 0 %.
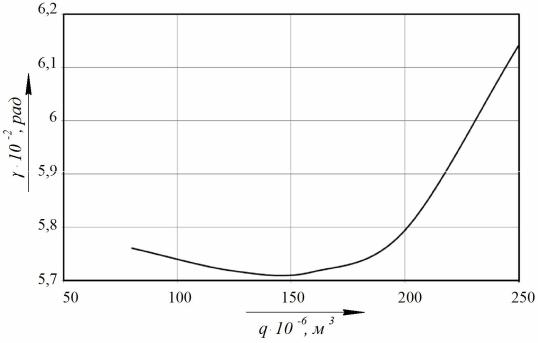
Результаты оптимизации значений угла зоны нечувствительности сведены в табл. 3.3 и представлены в виде графика (рис. 3.53).
Таблица 3.3
Зависимости оптимальных значений углов зоны нечувствительности гидрораспределителя от рабочего объема гидромотора обратной связи и значения целевых функций
q ∙ 10-6, м3 |
γ*∙10-2, рад |
σVKL, % |
τ∙10-2, с |
σOTKL, % |
tПП, с |
М, % |
80 |
5,761 |
4,272 |
5,761 |
7,588 |
0,441 |
0 |
125 |
5,718 |
5,969 |
5,718 |
6,545 |
0,432 |
0 |
160 |
5,717 |
7,129 |
5,717 |
6,031 |
0,427 |
0 |
200 |
5,795 |
9,495 |
5,795 |
5,355 |
0,417 |
0 |
250 |
6,141 |
11,598 |
6,141 |
4,257 |
0,398 |
0 |
Из графика видно, что зависимость лежит в области допустимых значений и при увеличении рабочих объемов гидромотора резко возрастает.
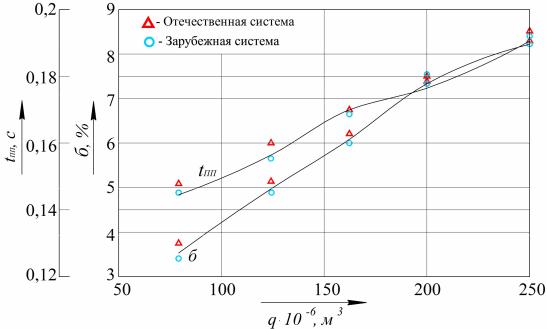
Зависимости величин перерегулирования при включении и отключении, времени чистого запаздывания при включении, времени
переходного процесса при отключении от рабочего объема гидромотора обратной связи при оптимизированных значениях углов зоны нечувствительности распределителя и при значениях углов рулевых управлений зарубежного и импортного производства приведены на рис. 3.54.
Рис. 3.53. Зависимость оптимальных значений углов зоны нечувствительности распределителя от рабочего объема гидромотора обратной связи

Рис. 3.54. Зависимости численных значений целевых функций от величины рабочего объема гидромотора обратной связи
Как видно из графика (см. рис. 3.54) при данном выборе значений углов зоны нечувствительности с увеличением рабочего объема гидромотора обратной связи увеличиваются значения величины перерегулирования расхода на выходе из ГРМ и время чистого запаздывания при включении гидропривода. Перерегулирование и время переходного процесса при отключении, наоборот, понижаются, а коэффициент колебательности принимает значение равное нулю. Все эти факторы говорят об успешной оптимизации параметров.
Максимальные расхождения численных значений целевых функций зарубежных и отечественных ГРУ по сравнению с оптимизированной системой сведены в табл. 3.4.
Таблица 3.4
Максимальные расхождения численных значений целевых функций при существующих значениях угла зоны нечувствительности гидрораспределителя по сравнению с оптимизированными значениями
Целевые функции |
Зарубежная система, % |
Отечественная система, % |
σVKL, % |
4,26 |
12,33 |
τ∙10-2, с |
0,16 |
0,92 |
σOTKL, % |
7,95 |
5,71 |
|
tПП, с |
0,25 |
|
0,56 |
|
|
Обоснование оптимальных значений площадей проходных |
||||
сечений каналов |
разгрузки в |
гидрораспределителе с целью |
|||
соответствия показателей качества ГРУ путям рационализации рабочих процессов.
Результаты оптимизации величины площади проходных сечений каналов разгрузки с целью соответствия величины перерегулирования целевой функции (3.13): при всех значениях рабочего объема гидромотора обратной связи оптимальные значения
площадей проходных сечений каналов |
разгрузки принимают |
|
значения fSL* = |
=1,5 ∙ 10-4 м2 со значениями целевой функции σ1 = |
|
3,676 %; σ2 = =5,034 %; σ3 = 6,032 %; σ4 = 7,327 %; σ5 = 8,163 %.
Результаты оптимизации величины площади проходных сечений каналов разгрузки с целью соответствия времени регулирования целевой функции (3.14): при всех значениях рабочего объема гидромотора обратной связи оптимальные значения площадей
проходных сечений |
каналов |
разгрузки |
принимают |
значения |
fSL* = 1,5 ∙ 10-4 м2 со |
значениями |
целевой |
функции tПП1 |
= 0,144 с; |
tПП2 = 0,158 с; tПП3 = =0,169 с; tПП4 = 0,175 с; tПП5 = 0,182 с.
Результаты оптимизации значений площадей проходных сечений каналов разгрузки сведены в табл. 3.5.
Для подтверждения необходимости оптимизации данного параметра, были приведены значения целевых функций при различных значениях рабочих объемов гидромотора при оптимизированных значениях площадей сливных каналов гидрораспределителя и при существующих площадях отечественных и импортных систем на рис. 3.55.
Из графика видно, что значения показателей качества повышаются с увеличением рабочего объема гидромотора при оптимизированных значениях площадей проходных сечений каналов разгрузки.
Таблица 3.5
Зависимости оптимальных значений площадей проходных сечений каналов разгрузки от рабочего объема гидромотора обратной связи и значения целевых функций
q ∙ 10-6, м3 |
fSL*∙10-4, м2 |
σ, % |
tПП, с |
80 |
1,5 |
3,676 |
0,144 |
125 |
1,5 |
5,034 |
0,158 |
160 |
1,5 |
6,032 |
0,169 |
200 |
1,5 |
7,327 |
0,175 |
250 |
1,5 |
8,163 |
0,182 |
Максимальные расхождения численных значений целевых
функций зарубежных и отечественных ГРУ по сравнению с оптимизированной системой сведены в табл. 3.6.
Таблица 3.6
Максимальные расхождения численных значений целевых функций при существующих значениях площадей проходных сечений каналов разгрузки по сравнению с оптимизированными значениями
Целевые функции |
Зарубежная система, % |
Отечественная система, % |
σ, % |
2,62 |
4,17 |
tПП, с |
0,31 |
1,43 |
Рис. 3.55. Зависимости значений целевых функций от величины рабочего объема гидромотора обратной связи
Таким образом, путем сравнения численных значений целевых функций оптимизированной системы со значениями целевых функций импортной и отечественной систем была подтверждена эффективность оптимизации основных конструктивных параметров гидрораспределителя ГРМ. Максимальные расхождения показателей отечественной системы по сравнению с оптимизированной составили порядка 20,7%, с зарубежной – порядка 7,9%.
3.2.6. Исследование траекторий поворота машины с базовым и оптимизированным гидравлическим рулевым механизмом
Для получения представления о поведении машины в процессе поворота при оптимизированных конструктивных параметрах ГРМ были построены теоретические траектории поворота фронтального погрузчика ТО-30 с базовым и оптимизированным ГРМ.
Чтобы выяснить при каких режимах работы погрузчика оптимизация ГРМ является целесообразной и как режим работы влияет на качество поворота, рассмотрены два режима: транспортный и рабочий (перемещение груза). Режим работы фронтального погрузчика определяется загрузкой рабочего оборудования, изменение которой приводит к изменению координат центра масс и инерционных характеристик машины. В процессе исследований, проведенных на примере погрузчика ТО-30, масса груза в ковше изменялась от 0 до 2,2 тонн.
Траектории были рассчитаны при максимальных скоростях движения на каждой передаче (кроме первой): при 3 м/с на второй передаче,при6 м/снатретейпередачеипри10 м/сначетвертойпередаче.
В качестве примера на рис. 3.56 и 3.57 приведены траектории поворота погрузчика ТО-30 в транспортном и рабочем режимах при указанных скоростях движения и с массой груза в ковше 2,2 тонны. На графиках сплошной линией обозначена идеальная траектория поворота, рассчитанная с учетом кинематики поворота машины с шарнирно-сочлененной рамой.
Траектории рассчитывались при подаче управляющего воздействия, приведенного на рис. 3.2, то есть при равномерном повороте рулевого колеса.
По графикам видно, что идеальные и рассчитанные траектории не совпадают, наблюдается, так называемое, рыскание машины,
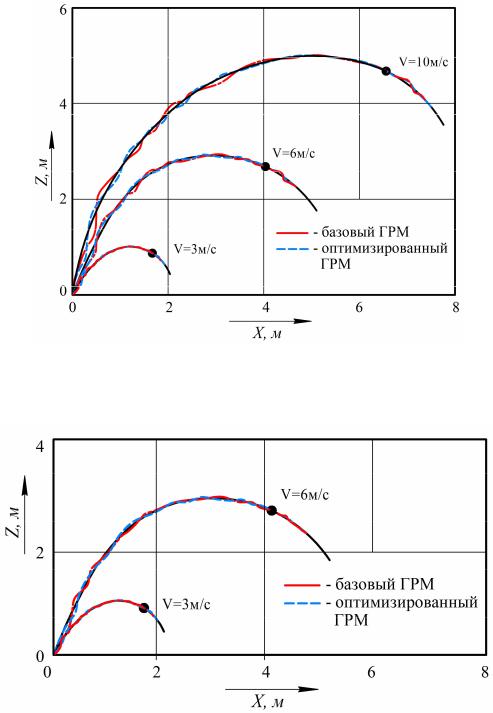
обусловленное несовершенством переходных процессов нарастания и падения расхода и давления рабочей жидкости в ГРУ.
Рис. 3.56. Теоретические траектории поворота фронтального погрузчика ТО-30 с базовым и оптимизированным ГРМ в транспортном режиме при различных скоростях движения
Рис. 3.57. Теоретические траектории поворота фронтального погрузчика ТО-30 с базовым и оптимизированным ГРМ в рабочем режиме при различных скоростях движения
Анализ представленных траекторий позволяет отметить, что при
больших скоростях движения машины качество траектории значительно ухудшается: увеличивается рыскание, увеличивается время выхода машины на заданную траекторию, понижаются запасы устойчивости при повороте. В большей степени рысканье наблюдается в транспортном режиме, при заполнении погрузочного оборудования рысканье уменьшается.
Для доказательства повышения устойчивости и качества траектории поворота машины было проведено сравнение численных значений величины перерегулирования траектории (рысканья машины), времени выхода на заданную траекторию и величины колебательности при выходе на траекторию погрузчика ТО-30 с базовым и оптимизированным ГРМ при различных скоростях движения и режимах работы. Максимальные расхождения показателей качества и устойчивости траектории ТО-30 с оптимизированным ГРМ по сравнению с базовым приведены в табл. 3.7 и 3.8.
Полученные результаты доказали целесообразность оптимизации основанных конструктивных параметров ГРМ. Значительное уменьшение рысканья машины достигалось при наибольших скоростях движения в транспортном режиме. Максимальные расхождения показателей траектории машины с оптимизированным по сравнению с базовым ГРМ составили 14,21% в транспортном режиме и 4,56% при заполненном ковше. То есть наибольший эффект наблюдается в транспортном режиме при максимальных скоростях.
Таблица 3.7
Максимальные расхождения показателей устойчивости и качества процесса поворота погрузчика ТО-30 с базовым и оптимизированным ГРМ при различных скоростях в транспортном режиме
Показатели |
V1 = 3 м/с |
V2 = 6 м/с |
V3 = 10 м/с |
М, % |
2,17% |
7,55% |
14,21% |
σ, % |
1,06% |
3,34% |
9,41% |
tПП, с |
0,75% |
5,13% |
6,36% |
Таблица 3.8
Максимальные расхождения показателей устойчивости и качества процесса поворота погрузчика ТО-30 с базовым и оптимизированным ГРМ при различных скоростях в рабочем режиме
Показатели |
V1 = 3 м/с |
V2 = 8 м/с |