

2629
.pdfотносительно корпуса гидроцилиндра, в общем случае определяется сложной функцией, зависящей от скорости перемещения и соотношения сил, приложенных к выходному звену /37, 80/:
|
dx |
|
|
|
dx |
|
|
|
|
|
|
||||||
RТР sign |
|
|
|
|
, при |
|
0; |
|
|||||||||
dt |
|
|
|||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|||||||
RТР , при |
dx |
|
0 и RP |
RCIL RТР ; |
|
||||||||||||
|
|
(2.37) |
|||||||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
||||||
RТР |
|
dx |
|
|
|
|
|
|
|
|
|
|
|
||||
-RТР , при |
0 и RP RCIL RТР ; |
||||||||||||||||
|
|||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
||
RP RCIL, при |
0 |
и |
|
RP RCIL |
|
|
RТР , |
||||||||||
|
|
||||||||||||||||
|
|||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|||||
где RР – равнодействующая сил давления рабочей жидкости на поршень:
RP pCIL1F1 pCIL2F2 . |
(2.38) |
Исходя из предположения, что в поршневом узле трения влияние уплотнителя, расположенного со стороны сливной полости, пренебрежимо мало, равнодействующая сил сухого трения определяется на основании принципа суперпозиции для функционирующих уплотнителей поршня и штока /31, 37/:
RТР = RТР.ПШ + RТР.ШТ, |
(2.39) |
где RТР.ПШ – сила трения в поршневом узле; RТР.ШТ – сила трения в штоковом уплотнении.
RТР.ПШ = π ∙ DПШ ∙ LПШ ∙ fПШ (р’+ р”); |
(2.40) |
RТР.ШТ = π ∙ DШТ ∙ LШТ ∙ fШТ ∙ р”, |
(2.41) |
где fПШ, fШТ – коэффициент трения поршня и штока соответственно; р’ – контактное давление, возникающее при монтаже уплотнения, изза предварительного прижатия к уплотняемой поверхности; р” – контактное давление, возникающее из-за воздействия на уплотнение
давления рабочей жидкости.
2.1.4. Обобщенная математическая модель гидросистемы рулевого управления
На данном этапе необходимо произвести композицию системы, то есть объединить математические модели элементов и подсистем ГРУ в единуюматематическуюмодель.
Объединение математических моделей отдельных элементов и подсистем в единую математическую модель системы производится в соответствии со следующими принципами:
-для последовательно соединенных элементов / подсистем выходные параметры предыдущего элемента являются входными параметрами последующего, поэтому блоки элементов соединяются в узлах, в которых сходятся одноименные входные и выходные сигналы;
-для параллельно соединенных элементов / подсистем сигналы на входе разветвляются, на выходе – суммируются.
На основе блок-схемы ГРУ, представленной на рис. 2.3 и выражений (2.1…2.41), описывающих элементы этой системы, в соответствии с принципами композиции математической модели была составлена структурная схема ГРУ в целом. Обобщенная структурная схема ГРУ представлена на рис. 2.17, обозначения на рисунке соответствуют обозначениям, ранее используемым при описании.
Коэффициенты передачи звеньев структурной схемы:
kOS1 |
1 |
|
; |
kOS2 = IГМ ; |
kOS3 = hГМ ; |
|||
|
qГМ ηОБ |
|
||||||
kOS4 = kСЖ ; kOS5 = |
qГМ 1 ηОБ |
; |
||||||
|
||||||||
|
|
|
|
|
|
рНОМ |
||
|
kK1 = FK1 ; |
|
kK2 = FK2 ; |
kK3 = 1/mK ; |
||||
kK4 = hК ; |
kK5 |
= с; kK6 = k∙μ; kGL1 |
|
2 |
; |
|||||
|
|
|||||||||
|
|
2 γ LGL |
|
|
|
1 |
|
π dGL νЖ |
||
kGL2 |
|
; |
kGL3 = kУПР ; |
kCIL1 |
; |
kCIL2 = F2 ; |
||||
|
π dGL5 g |
|||||||||
|
|
|||||||||
|
|
|
|
|
F1 |
|
|
|||
|
kCIL3 = kПЕР ; |
kCIL4 = hCIL ; |
kCIL5 = m; |
kCIL6 = F1. |
||||||

Рис. 2.17. Структурная схема гидросистемы рулевого управления
2.2. Математическая модель стохастических возмущающих воздействий, действующих на систему рулевого управления
В процессе поворота колесной машины ходовое оборудование взаимодействует с внешней средой, к которой относятся неровности грунта (микрорельеф), что вызывает стохастические (случайные) возмущающие воздействия, действующие на систему рулевого правления и машину в целом. В связи с этим необходимо произвести анализ математических моделей микрорельефа и разработать математическую модель микрорельефа применительно к предлагаемой базовой машине.
2.2.1. Математическая модель микрорельефа
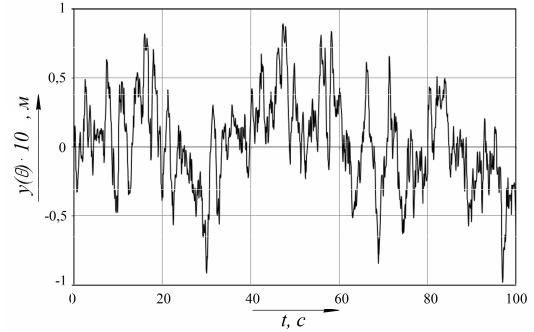
Для получения координат микрорельефа производилась нивелировка участка длиной окружности с радиусом поворота базовой машины, измерения производились через каждые 0,1 метра. Был проведен статистический анализ выборки y(Θ) – случайная зависимость поперечных координат микрорельефа от угла поворота.
Для исключения грубых ошибок из полученных экспериментальных данных по упорядоченной выборке у1 у2 … уn вычислялось математическое ожидание по формуле /15, 38, 40, 95/:
|
|
1 |
n |
|
|
mX |
|
xi , |
(2.42) |
||
n |
|||||
|
|
i 1 |
|
и дисперсия по формуле /15, 38, 40, 95/:
1 |
n |
|
2 |
|
|
DX |
|
i 1 |
xi |
mX , |
(2.43) |
n 1 |
|||||
где хi – значение i-го наблюдения; n – число наблюдений.
Грубой считается ошибка, при которой выполняется неравенство
/15, 38, 40, 95/: |
|
|
|
|
xi mX |
tk,α , |
(2.44) |
|
σX |
||
|
|
|
где tk, – табличное значение параметра распределения Стьюдента при степени свободы k = n – 1 и доверительной вероятности рд = 1 – у;у – уровень значимости ( у = 1 – рД); σХ – среднеквадратическое отклонение.

Принято допущение, что полученные данные замеров подчиняются нормальному закону распределения случайных величин. С учетом этого, истинное значение математического ожидания с вероятностью pД определяется по формуле /15, 38, 40, 43, 95/:
mX |
|
tβσX |
mX |
mX |
|
tβσX |
, |
(2.45) |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
||||||||
|
|
|
n |
|
|
|
|
n |
|
|||
где t – величина, характеризующая для нормального закона распределения число среднеквадратических отклонений, откладываемых от центра рассеивания в обе стороны для того, чтобы вероятность попадания в полученный участок была равна pД.
Среднеквадратическое отклонение определялось по формуле /15, 38, 40, 95/:
|
|
t |
X |
|
X |
X |
|
t |
X |
|
. |
(2.46) |
|
|
|
|
|
|
|||||||
2n |
|
|||||||||||
|
|
|
|
|
|
|
|
2n |
|
|||
Объем необходимых испытаний определяется исходя из заданной относительной погрешности измерений математического ожидания и среднеквадратического отклонения, по формулам /19/:
|
tβ2ψσ2 |
|
||
nm |
|
|
; |
(2.47) |
δ2 |
||||
|
m |
|
||
|
tβ2 |
|
||
nσ |
|
, |
(2.48) |
|
2δσ2 |
||||
где m и – относительные погрешности для математического ожидания и среднеквадратического отклонения соответственно; б – коэффициент вариации измеряемой величины.
Необходимая продолжительность моделирования (реализации) Т определяется исходя из условия обеспечения заданной степени точности и вероятностной надежности оценок статистических средних: математического ожидания, среднеквадратического отклонения и относительной средней квадратической погрешности определения корреляционной функции /19, 58/.
Время записи, удовлетворяющее рассмотренным условиям для нормального стационарного эргодического процесса, находили по формулам /19, 58/:
T τ |
k |
|
tβψb 2 |
; |
(2.49) |
||||||
|
|
|
|
|
|
|
|||||
m |
|
|
|
|
δm |
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
τ |
k |
t |
2 |
|
|
|
|
|
T |
|
|
|
|
β |
; |
|
(2.50) |
|||
2δ |
|
|
|
||||||||
σ |
|
|
2 |
|
|
|
|||||
|
|
|
|
|
|
σ |
|
|
|
||
|
T |
|
|
τk |
, |
|
(2.51) |
||||
|
|
δk2 |
|
||||||||
|
k |
|
|
|
|
|
|||||
где Тm, T , Tk – необходимая длительность моделирования из условия обеспечения допустимой относительной погрешности математического ожидания m, среднеквадратического отклонения и корреляционной функции к; t – коэффициент нормального закона распределения, находился по заданной надежности (доверительной вероятности); б – коэффициент вариации измеряемого параметра;к – время затухания корреляционной функции.
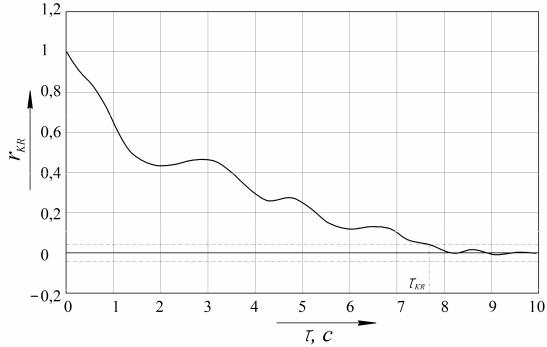
Для определения времени затухания корреляционной функции к, была получена нормированная корреляционная функция для измеряемой в процессе исследования поперечной координаты микрорельефа, изображенная на рис. 2.18.
Построение нормированной корреляционной функции, для дискретной выборки, производилось по следующей формуле /19, 58/:
rKR = RKR / DR, |
(2.52) |
где RKR – ненормированная корреляционная функция анализируемого параметра; DR – дисперсия анализируемого параметра.
|
1 |
n m |
|
|
RKR |
R ti MR R ti m MR , |
(2.53) |
||
|
||||
|
n m i 1 |
|
||
где n – число ординат дискретизации на длине реализации; m – число ординат оценки корреляционной функции, характеризующее интервал корреляции случайного процесса; MR – математическое
ожидание анализируемого параметра; R(ti) – текущее значение из выборки случайного процесса; R(ti+m) – значение из выборки случайного процесса на интервале корреляции.
|
1 |
n |
|
|
MR |
R ti ; |
(2.54) |
||
|
||||
|
ni 1 |
|
||
= m t, |
(2.55) |
|||
где t – время дискретизации выборки случайного процесса.
Рис. 2.18. Нормированная корреляционная функция координат микрорельефа
Время затухания корреляции определяется как максимальное время, за которое нормированная корреляционная функция входит в пределы 0,05 /19, 58/:
rKR( K) = 0,05 rKR(0). |
(2.56) |
По наибольшему значению Т = 24,5с для параметра у, принята длительность моделирования, с учетом начального участка нестационарности Тн 5 с, Тм = Т + Тн = 30 с.
Рекуррентное уравнение для корреляционной функции вида:
R(τ) = σ2∙e-α|τ|∙cos(β|τ|) |
(2.57) |

выглядит следующим образом:
y(n) = a0x(n) + a1x(n –1) + b1y(n –1) + b2y(n –2). |
(2.58) |
На рис. 2.19 показана аппроксимированная корреляционная функция координат микрорельефа у(Θ).
Рис. 2.19. Экспериментальная и аппроксимированная корреляционная функция координат микрорельефа
Отклонения при аппроксимации зависимостей составляли не более 20 %.
На рис. 2.20 в качестве примера представлен фрагмент стохастической модели возмущающего воздействия, создаваемого микрорельефом по корреляционной функции вида (2.57):
Параметры корреляционной функции: = 0,083 м; = 0,112 с-1;
= 0,133 с-1.
-1
0 |
5 |
10 |
15 |
20 |
25 |
Рис. 2.20. Фрагмент стохастической модели возмущающего воздействия, создаваемого микрорельефом
2.3.Имитационная модель поворота машины
сшарнирно-сочлененной рамой
Поворот шарнирно-сочлененной машины осуществляется за счет складывания двух шарнирно-сочлененных полурам. Каждая полурама связана кинематически с исполнительными гидроцилиндрами, которые осуществляют складывание и выпрямление рамы относительно вертикального шарнира. Таким образом, при повороте машины входными параметрами являются перемещение и скорость перемещения штоков исполнительных гидроцилиндров, усилия и моменты сопротивления, приведенные к шинам, а выходными – угол складывания и угловая скорость складывания полурам, а также усилия сопротивления повороту, приведенные к штокам исполнительных гидроцилиндров.
Для расчета модели поворота машины закладывались параметры погрузчика одноковшового фронтального ТО-30, однако представленная модель может быть использована для исследования динамических процессов при повороте любой пневмоколесной машины с шарнирно-сочлененной рамой, путем введения конкретных параметров блоков SimMechanics.