

2629
.pdfпреобразовывались в электрические аналоговые сигналы, которые в свою очередь преобразовывались в цифровой вид при помощи аналого-цифрового преобразователя (АЦП) и регистрировались на мониторе ПК.
Рис. 4.1. Общий вид опытного гидравлического рулевого механизма
Рис. 4.2. Конструкция опытного образца гидравлического рулевого механизма

Рис. 4.3. Общий вид стенда для экспериментальных исследований гидравлических рулевых механизмов

Визуальный контроль параметров производился при помощи манометров МН1…МН5. Перемещение штока исполнительного гидроцилиндра фиксировалось с помощью потенциометрического датчика движения П1. Давление рабочей жидкости на входе в ГРМ, в напорной полости исполнительного гидроцилиндра и в напорной полости нагрузочного гидроцилиндра фиксировалось потенциометрическими датчиками давления Д1, Д2, Д3 типа ДТ-150 соответственно. Установившееся значения расхода, поступающего в исполнительный гидроцилиндр, а также температура рабочей жидкости фиксировались гидротестером Т1 типа ГТ-600.
На рис. 4.4 изображена схема гидравлическая стенда с указанием мест установки датчиков.
Рис. 4.4. Схема гидравлическая стенда для экспериментальных исследований гидравлических рулевых механизмов
с указанием мест установки датчиков
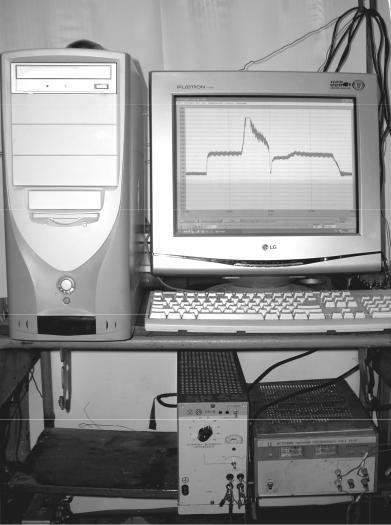
Измерительная аппаратура представляет собой единый измерительный комплекс, смонтированный на подвижной тележке (рис. 4.5). Комплекс измерительной аппаратуры включает:
-персональный компьютер с установленной платой АЦП L-783;
-датчики для измерения регистрируемых параметров;
-гидротестер ГТ-600;
-блок питания постоянного тока Б5-8.
Рис. 4.5. Комплекс измерительной аппаратуры
Платы АЦП L-783 (рис. 4.6) являются современными, быстродействующими и надежными устройствами на базе высокопроизводительной шины PCI 2.1 для ввода, вывода и обработки аналоговой и цифровой информации в персональных IBMсовместимых компьютерах. Благодаря интерфейсу PCI обеспечивается высокая скорость обмена информацией (данными) с

программой пользователя, исключаются конфликты с другими платами, установленными в ПК. На платах полностью отсутствуют какие бы то ни было конфигурационные перемычки и переключатели. Все режимы работы таких плат задаются программным образом. Платы L-783 можно рассматривать и как удобное средство для многоканального сбора информации, и как законченную систему с собственным процессором, позволяющую пользователю реализовывать свои собственные алгоритмы обработки данных на уровне программ установленных на платах современного сигнального процессора (DSP) фирмы Analog Devices, Inc /11, 22/.
Рис. 4.6. Общий вид платы АЦП L-783
Экспериментальные исследования проводились при установившемся тепловом режиме рабочей жидкости Т=353 К. Отклонение температуры рабочей жидкости от указанной при проведении исследований не превышали + 2 К /21, 46/.
Исследования проводились на рабочей жидкости М8Г2 по ГОСТ 8581-78.
При проведении экспериментальных исследований объекта на стенде определялись следующие параметры:
-перемещение штока исполнительного гидроцилиндра;
-давление в гидролинии между питающим насосом и ГРМ;

-давление в полостях исполнительного гидроцилиндра;
-давление в полостях нагрузочного гидроцилиндра;
-расход в гидролинии между ГРМ и исполнительным гидроцилиндром;
-температура рабочей жидкости.
Параметры, определяемые при проведении экспериментальных исследований, измерялись в соответствии с ГОСТ 17108-86.
Для определения координаты перемещения штока исполнительного гидроцилиндра использовался специально изготовленный датчик потенциометрического типа (рис. 4.7) на основе многооборотного резистора СП5–44–01–1, обеспечивающего погрешность измерений, не превышающую + 0,3%. Датчик был подключен по схеме, обеспечивающей линейную запись перемещений /95/.
Давление в полостях исполнительного и нагрузочного гидроцилиндров и в гидролинии между питающим насосом и ГРМ измерялось потенциометрическими датчиками давления повышенной точности типа ТД-150 (рис. 4.8) с максимальной погрешностью, равной 0,8%.
Рис. 4.7. Вращающийся потенциометрический датчик хода штока исполнительного гидроцилиндра
Тарировка датчиков давления производилась на специальном стенде (рис. 4.9). Давление рабочей жидкости, действующее на чувствительный элемент датчика, создавалось плунжерным насосом и контролировалось по образцовому манометру класса точности 0,4 по

ГОСТ 2405-80. Тарировка производилась методом последовательного нагружения и разгружения в диапазоне давлений 0 – 15 МПа с интервалом в 0,5 МПа.
Рис. 4.8. Потенциометрические датчики давления повышенной точности
Рис. 4.9. Тарировка датчиков давления
Тарировка измерительных каналов с целью повышения точности измерений и оценки погрешности повторялась не менее 4 раз. Проведенные тарировки выявили линейность изменения выходных сигналов, позволили определить масштабные коэффициенты, необходимые для определения действительных значений параметров по осциллограммам /58/.
Определение установившегося значения расхода рабочей жидкости, поступающего в исполнительный гидроцилиндр, а также температура рабочей жидкости, производились с использованием гидротестера ГТ-600.
Гидротестер ГТ - 600 предназначен для безразборной диагностики гидроагрегатов, оперативного выявления неисправностей гидропривода, прогнозирования ресурса и оптимальной настройки гидроэлементов дорожных, строительных машин и технологического транспорта /58/.
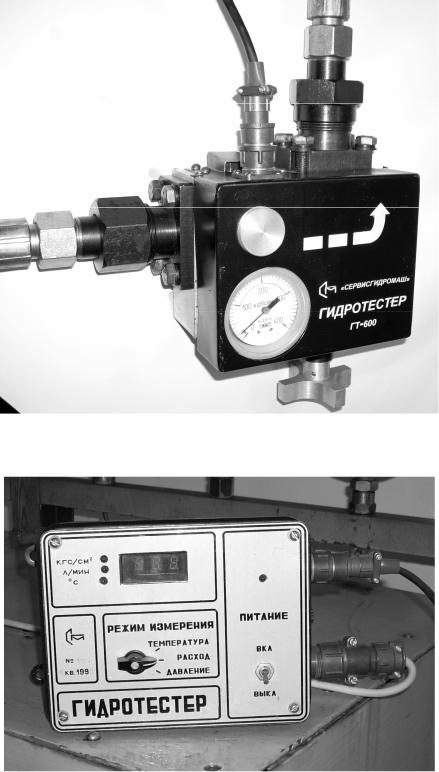
В комплект гидротестера входят: механический и электронный блоки, соединительный кабель и кабель подключения к бортовой сети машины или аккумулятору с помощью зажимов. Механический блок (рис. 4.10) состоит из корпуса в котором установлены датчики расхода, температуры и манометр давления, накрытых специальной крышкой. На крышке установлен подсоединительный разъем. Механический блок снабжен входным и выходным штуцерами, а также нагрузочным устройством, позволяющим создавать номинальное давление без выполнения рабочих операций /58/.
Электронный блок (рис. 4.11) выполнен в виде ударопрочного корпуса в котором установлены печатный монтаж электронных схем, подсоединительные разъемы, органы управления и электронное табло, на котором регистрируются измеренные параметры при максимальной погрешности измерений 1,5% и нелинейности характеристик 1%: расход, температура, давление /58/.
Измерение осуществляется следующим образом. Узел датчиков (механический блок) посредством входного и выходного штуцеров подсоединяется в измеряемую гидролинию в разрыв гидросхемы за диагностируемым элементом. Кабелем соединяется механический блок с электронным блоком, который посредством кабеля питания соединяется с источником питания. Переключатель "Режим измерения" переводится в положение диагностируемого параметра. В положении "Расход" и "Температура" на электронном табло в
цифровом виде высвечивается значение расхода и температуры, а индикаторные лампочки указывают на размерность измеренной величины. Манометр давления на механическом блоке показывает величину давления в кгс/ см 2 .
Рис. 4.10. Механический блок гидротестера ГТ-600
Рис. 4.11. Электронный блок гидротестера ГТ-600
4.1.2. План эксперимента и уточнение коэффициентов математической модели
В соответствии с информацией о местах установки датчиков, приведенной в разд. 4.1.1, был составлен план экспериментальных исследований:
-Задать давление в нагрузочном гидроцилиндре в соответствии со значением, рассчитанным с помощью математической модели.
-Сформировать управляющее воздействие:
При включении гидропривода необходимо:
-Определить координату перемещения штока исполнительного гидроцилиндра.
-Определить установившееся значение расхода на выходе из
ГРМ.
-Определить давление питающего насоса в нейтральном положении гидрораспределителя.
-Определить установившееся значение давления питающего насоса при равномерном вращении рулевого колеса.
-Определить давление в напорной полости исполнительного гидроцилиндра при равномерном вращении рулевого колеса.
-Проверить соответствие установившегося значения давления в напорной полости нагрузочного гидроцилиндра заданному при равномерном вращении рулевого колеса.
При отключении гидропривода (снятие управляющего воздействия) необходимо:
-Определить давление питающего насоса в нейтральном положении гидрораспределителя.
-Определить давление в напорной полости исполнительного гидроцилиндра.
-Определить давление в напорной полости нагрузочного гидроцилиндра.
На рис. 4.12 и 4.13 в качестве примера приведены осциллограммы рабочих процессов ГРУ при включении и при