

Необходимо проверить, обеспечит ли расчетное число машин или установок своевременную обработку подвижного состава
Zм ≥ |
|
|
Qс |
|
, |
(24.7) |
П |
|
(Т − x t |
) |
|||
|
|
т |
м |
|
|
|
где Qс — максимальный поток груза данной номенклатуры, поступающий на станцию за сутки, т; Пт — техническая производительность машинилиустановок, т/ч; Т — продолжительностьработыгрузового фронта, т; х — числоподачвагоновнагрузовойфронт; tм— времяна подачу, уборку или перестановку вагонов одной подачи, ч.
Если в схему механизации входит несколько машин, передающих последовательно груз от одной к другой, то следует подобрать их так, чтобы производительность каждой последующей была равна или несколько превышала производительность предыдущей.
Глава 25. Простейшие механизмы и устройства
25.1. Средства малой механизации и простейшие приспособления
Дляоблегченияручноготруда, ускоренияоперацийприпогрузке и выгрузке и улучшения условий техники безопасности на по- грузочно-разгрузочных работах применяются средства малой механизации и различные простейшие приспособления (роликовые
ишарнирные ломы, домкраты, подъемники, тележки, роликовые конвейеры, слеги, сходни, трапы и др.), а также различный инвентарь и инструмент (ломы, клинья, молотки, кувалды, лестницы, цепи, тросы и др.).
Для перекрытия пространства между дверным проемом вагона
иполом рампы склада применяют соединительные переходные мос-
тки (рис. 25.1). Изготавливают их из рифленых листов стали. Когда уровни пола вагона и рампы склада совпадают, мостки укладывают горизонтально, при разных уровнях — наклонно.
Сходни или трапы используют, когда пол склада расположен на уровне головки рельса и ниже, а также при укладке грузов в штабеля высотой свыше 2 м.
При помощи двухколесных ручных тележек перемещают тарные и штучные грузы массой до 0,5 т. Для перевозки легких тар-
370
ныхиштучныхгрузов, багажа, почты служат трех- и четырехосные тележки. Их используют также в качестве прицепных к механическим тягачам.
При помощи ручной те- |
|
|
лежки с подъемными вилами |
|
|
(рис. 25.2) грузоподъемностью |
|
|
от 0,5 до 2,0 т перерабатыва- |
|
|
ют тарные и штучные грузы. |
Рис. 25.1. Соединительный переходной |
|
Вилы заводят под груз, нахо- |
мосток |
|
дящийся на подкладках или |
|
|
поддоне. Для подъема его на |
|
|
высоту 100 мм необходимо |
|
|
сделать пять-шесть покачива- |
|
|
ний дышлом. Опускаются |
|
|
вилы под действием силы тя- |
|
|
жести груза при одновремен- |
Рис. 25.2. Ручная гидравли- |
|
номснижениидавлениямасла |
||
ческая тележка грузоподъем- |
||
в гидродомкрате. |
ностью 1 т |
Дляподъематяжелыхгрузов на небольшую высоту служат домкраты. Они могут быть ре-
ечными, винтовыми и гидравлическими. Наибольшее распространение получили реечные домкраты (рис. 25.3) грузоподъемностью 1—12 т и высотой подъема груза 350—450 мм и винтовые домкраты грузоподъемностью до 20 т и высотой подъема груза 240—370 мм. Винтовой домкрат (рис. 25.4) в отличие от реечного не требует специальных стопорных или тормозных приспособлений. Широко распространены и домкраты с захватной лапой грузоподъемностью 2,5 т. В нижнем положении лапа находится на высоте 40 мм от пола, ход ее составляет 300 мм.
Гидродомкраты грузоподъемностью 5 т, оборудованные дополнительными устройствами, используются в качестве приспособлений для закрывания люков полувагонов.
Для перемещения тяжелых грузов на небольшие расстояния по ровнойитвердойповерхностиприменяютроликовыеломы (рис. 25.5).
371
Рис. 25.3. Схема реечного домкрата с |
|
безопасной рукояткой: 1 — рукоятка; |
|
2 — храповое колесо; 3 — собачка, |
Рис. 25.4. Схемавинтовогодомкрата: |
удерживающая колесо и укрепленная |
|
настанине; 4 — опорнаяподушка; 5 — |
1 — литаястанина; 2 — неподвижная |
металлическая станина; 6 — болты, |
гайка, по резьбе которой перемеща- |
скрепляющие станину с распорными |
ется винт; 3 — стальной самотормо- |
втулками; 7 — зубчатаярейка, переме- |
зящийвинт, заканчивающийсяголов- |
щающаясявнутристаниныпонаправ- |
кой; 4 — рукоятка с трещеткой |
ляющим; 8 — опорнаялапаснасечкой |
|
|
Они представляют собой штангу, через |
|
утолщенныйнижнийконецкоторойпро- |
|
пущенаосьснасаженнымнанеероликом, |
|
служащим точкой опоры при подъеме |
|
груза как рычаг первого рода. Таким ло- |
|
мом пользуются для подъема груза при |
|
подведенииподнегороликовойцепиили |
|
тросов при застропке груза. |
|
Роликовымицепями(рис. 25.6) перека- |
|
тывают тяжеловесные грузы в одном |
Рис. 25.5. Роликовый лом |
уровне, а также поднимают или скаты- |
372
вают по наклонной плоскости. Грузподнимаютроликовымиломами или домкратами на высоту 100—110 мм и подводят под него роликовыецепи. Затемгрузопускают и перемещают при помощи лебедок или вручную. Благодаря
шарнирным сочленениям роли- Рис. 25.6. Роликовые цепи ков цепи легко преодолевают не-
ровности.
Роликовые слеги предназначены для погрузки, выгрузки и перемещения штучных грузов с жесткой и ровной нижней поверхностью. Слеги представляют собой легкий роликовый конвейер. По слегам, уложеннымгоризонтально, можноперемещатьгрузмассой до 3 т, причем он должен одновременно опираться не менее чем на триролика. Если необходимо, роликовые слеги вперевернутом положении можно использовать как низкие многоопорные тележки для транспортировки грузов.
Для наклонного перемещения грузов сверху вниз с использованием их силы тяжести применяются спускные лотки, самотечные трубы, роликовые конвейеры, винтовые спуски и др.
25.2. Грузоподъемные устройства
Для вертикального перемещения груза применяют простейшие грузоподъемные устройства периодического действия.
Блоком называется диск, вращающийся на оси и имеющий на ободе желоб, огибаемый тросом или цепью. Если ось блока во время подъема груза не перемещается, то такой блок называется неподвижным, если ось блока перемещается, то блок подвижной. Неподвижный блок выигрыша в силе не дает и является только направляющим. У подвижного блока масса груза равномерно распределяется на две ветви тягового органа, следовательно, тяговое усилие требуется в два раза меньше массы груза (без учета коэффициента полезного действия блока).
Полиспаст — это совокупность подвижных и неподвижных блоков, огибаемых гибким элементом (канатом или цепью). В
373
силовом полиспасте все неподвижные блоки насаживают на одну ось, а подвижные — на другую, устанавливаемую на поперечине (траверсе), ккоторойподвешенгрузовойкрюк. Силовойполиспаст даетвыигрышвсиле, нопроигрышвдлине перемещаемого каната. Силовые полиспасты позволяют поднять (или переместить) тяжелые и громоздкие грузы с небольшими усилиями. Часто они входят составными элементами в механизм подъема более сложных грузоподъемных машин (например, кранов). Скоростные полиспасты дают выигрыш в скорости и применяются для гидравлических и пневматических подъемников.
Рис. 25.7. Электрическая таль: 1 — подвеснойпуть(двутавроваябалка);2 —ходоваятележкасмеханизмом передвижения; 3 — грузоподъемный механизм; 4 — кнопочная станция управления; 5 — крюковая подвеска
Талями называются подвесные грузоподъемные устройства с ручным, электрическим, пневматическим или гидравлическим приводом. Они отличаются простотой конструкции, малыми габаритами и небольшой собственной массой.
Электрическая таль (рис. 25.7) состоит из двух основных узлов — грузоподъемного механизма и ходовойтележки, котораяперемещается по подвесному однорельсовому пути (двутавровой балке). Грузоподъемный механизм имеет корпус, грузоподъемную электрическую лебедку и подвеску (крюк и обойму).
Ходоваятележка, смонтированнаявместесгрузоподъемныммеханизмом, приводится в движение электродвигателем. Ток подводитсякэлектродвигателямспомощью гибкого кабеля или троллеев (голых проводов, подвешенных на изоляторахпараллельнодвижению тельфера). По троллеям скользят токосъемники, установленные на
374
тельфере, ипитаютдвигателиэлектрическимтоком. Управлениетельфером обычно осуществляется с пола при помощи кнопочной станции или из кабины.
Пневматические тали имеют привод от пневмодвигателя или пневмоцилиндра. Этиталиподвешиваютстационарноилипередвигают по подвесному рельсу. Сжатый воздух подводится по гибкому шлангу от общей пневмосети или отдельной установки.
Подвесные тележки предназначены для подъема и перемещения штучных грузов по рельсовому подвесному пути.
Тележкасостоитизподвескискрюками, механизмовподъемагруза, передвижения кабины и тележки. В качестве механизма подъема используют одну или две электротали. Механизм передвижения состоит из двух ведущих ходовых и одной ведомой на прицепе тележек. Грузоподъемность подвесных тележек составляет 3,5 и 10 т.
Грейферныетележкипредназначеныдляподъемаиперемещения сыпучих грузов. Тележка состоит из сварной рамы, а также кабины, грейфера механизмов передвижения тележки, подъема груза, закрывания и раскрывания грейфера. В качестве таких применяются грузовые механизмы электроталей грузоподъемностью 2 и 3 т.
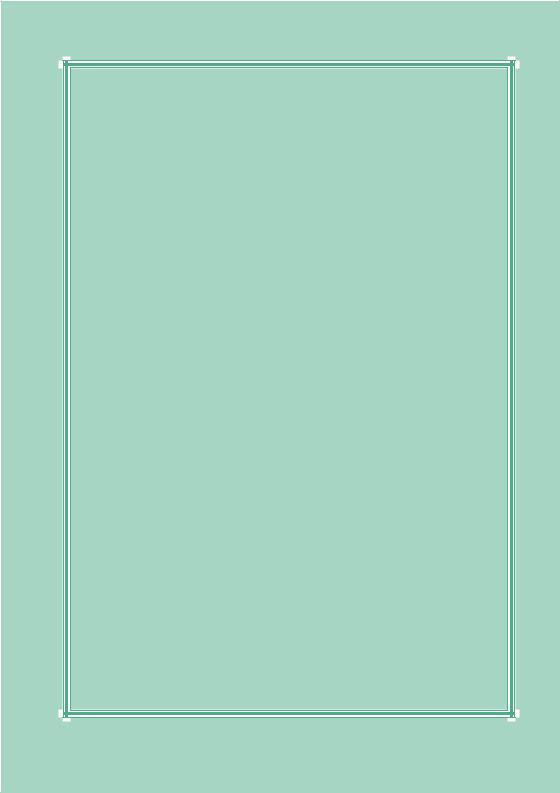
Лебедкой называется грузоподъемная машина, перемещающая грузприпомощистального каната, наматываемогонавращающийся барабан. Применяют их самостоятельно, а также используют как узлы и агрегаты более сложных машин и устройств. Лебедки могут быть использованы для перемещения вагонов на фронтах погрузки и выгрузки. Они бывают с ручным и машинным приводом. По назначению лебедки делятся на грузоподъемные и тяговые. Если полезноесопротивлениеотподнимаемогогрузанаправленовертикально, толебедкагрузоподъемная, аеслигоризонтальноилиподуглом, то тяговая. Основные характеристики и технические требования к конструкциямоднобарабанныхэлектрическихподъемныхстроитель- но-монтажных лебедок регламентированы ГОСТ.
Если у электролебедки фрикционный барабан вертикальный (рис. 25.8), то ее называют шпилем или кабестаном, если горизонтальный — брашпилем. Свободный конец каната 4 у шпиля соединяется с перемещаемым грузом или подтягиваемым вагоном. Другой конец, делая несколько витков на барабане 1, проходит через направляющий ролик 5 к канатосборному бараба-
375