

Метод сил. Канонические уравнения
Наиболее распространенным (но не единственным) методом раскрытия статической неопределимости является метод сил. Последовательность составления уравнений совместности перемещений методом сил удобно проследить на примере какой-либо плоской системы, например рамы (рисунок 12.1).
Удалим избыточные опорные связи, например, одну в катке; и три в правой заделке и заменим действие этих связей силами X1, X2, X3 и моментом X4 (см. рисунок 12.1). Полученную таким способом статически определимую систему называют эквивалентной, поскольку напряжения и перемещения сечений в этой системе такие же, как и в заданной статически неопределимой. Система, полученная из заданной путем удаления всех избыточных связей и внешней нагрузки, называется основной системой (см. рисунок 12.1).
Величины неизвестных силовых факторов X1, X2, X3, X4 найдем из условия равенства нулю перемещений освобожденных опорных сечений по направлению снятых связей. Эти перемещения вызываются в эквивалентной системе совместным действием заданной нагрузки и самих усилий X1, X2, X3, X4, поэтому
|
(12.4) |
Индексы 1, 2, 3 и 4 показывают, что рассматриваются перемещения опорных сечений соответственно по направлению X1, X2, X3, X4.
Очевидно, что только при выполнении условий (12.4) напряжения и деформации в эквивалентной системе будут равны напряжениям и деформациям в заданной статически неопределимой системе.
Таким образом, в методе сил задача расчета статически неопределимой системы сводится к расчету статически определимой эквивалентной системы, нагруженной заданной внешней нагрузкой и неизвестными пока усилиями X1, X2, X3, X4.
Согласно принципу независимости действия сил перемещение сечения от одновременного воздействия группы нагрузок равно сумме перемещений от каждой из нагрузок в отдельности. Поэтому любое из уравнений (12.4) можно представить в виде
|
(12.5) |
Но перемещение
![]() от
усилия Xk пропорционально
величине этого усилия. Поэтому
от
усилия Xk пропорционально
величине этого усилия. Поэтому
![]() ,
,
где δik - перемещение от единичного усилия (1 Н, 1 Нм и т. д.), приложенного вместо Xk.
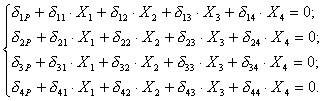
Итак, в развернутом виде уравнения совместности перемещений (12.4) запишутся следующим образом:
|
(12.6) |
При выводе уравнений (12.6) рассматривалась плоская рама, но с равным успехом такой системой могла быть пространственная рама, ферма или любая смешанная стержневая система с любой степенью статической неопределимости. Структура уравнений системы (12.6) от такой замены не изменится, но число их всегда будет равно степени статической неопределимости задачи.
Равенства (12.6) представляют собой систему линейных алгебраических уравнений относительно искомых неизвестных усилий X1, X2, X3, X4 и называются каноническими уравнениями метода сил.
Коэффициенты канонических уравнений суть перемещения определенных сечений эквивалентной системы в известных направлениях и от известной нагрузки. Так, δ1P есть перемещение точки приложения силы X1 в направлении этой силы от одной только внешней нагрузки, δ11 - перемещение той же точки и в том же направлении, но лишь от одной единичной силы, приложенной вместо X1, а δ12 - перемещение от единичной силы, приложенной вместо X2 и т.д.
Любой коэффициент канонического уравнения можно, а иногда и полезно представить графически, если изобразить вид системы после приложения к ней соответствующего единичного усилия или заданной нагрузки. На рисунок 12.4 показаны некоторые из коэффициентов системы (12.6) для рассматриваемой рамы. Коэффициенты вида δ11, δ22,.δii называют иногда главным а, δ12, δ21,.δik - побочными.
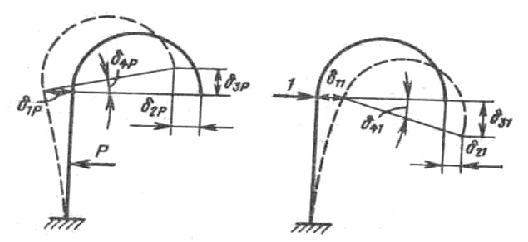
Рисунок 12.4.
Уравнения (12.6) выведены на примере стержневой системы, у которой избыточными были внешние (опорные) связи. Такие системы принято называть внешне статически неопределимыми:
Рассмотрим теперь стержневую систему, в которой избыточный являются только внутренние связи, например, плоскую раму с опорной шарнирной и другой катковой опорой (рисунок 12.5).
С точки зрения вычисления опорных реакций эта рама статически определима (при большом числе опор она была бы еще и внешне статически неопределимой). Однако из одних лишь уравнений равновесия внутренние силовые факторы в ее сечениях определит невозможно.
Действительно, если разрезать раму на две части и составить уравнений равновесия одной из них, то в эти три уравнения войдут шесть неизвестных величин - изгибающие моменты X1 и X4, перерезывающие силы X2 и X5, нормальные силы X3 и X6 в двух различных сечениях рамы (см. рисунок 12.5). Если разрезать раму только в одном месте (см. рисунок 12.5) и составить уравнения равновесия для всей рамы то искомые неизвестные X1, X2 и X3 в этих уравнениях взаимно уничтожаются, так как в силу закона действия и противодействия одноименные силовые факторы на двух сторонах разреза равны по величине и противоположны по направлению.
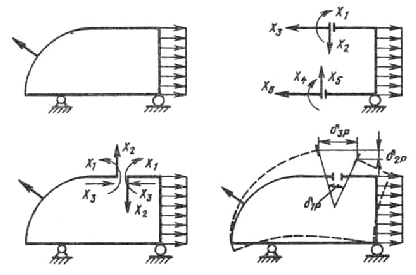
Рисунок 12.5.
Таким образом, замкнутый плоский контур любого очертания представляет собой трижды статически неопределимую систему.
Разрез замкнутого плоского контура удаляет сразу три внутренние связи, препятствующие относительным перемещениям сечений в этом месте по направлению сил X2 и X3 и повороту их друг относительно друга в направлении моментов X1.
В действительности разрез отсутствует, и поэтому относительные перемещения двух смежных сечений эквивалентной системы (см. рисунок 12.5), вызванные совместным действием заданной нагрузки и силовых факторов X1, X2, и X3 должны быть равны нулю. Как и в случае внешне статически неопределимых систем, запишем условия равенства нулю относительных перемещений двух смежных сечений в виде системы канонических уравнений:
|
(12.7) |
Канонические уравнения совместности перемещений (12.7) для внутренне статически неопределимых систем отличаются от аналогичных уравнений (12.6) для внешне статически неопределимых систем только тем, что коэффициенты уравнений (12.6) представляют собой абсолютные, а в (12.7) - относительные перемещения двух смежных сечений в месте разреза. Например, δ1P - относительный угол поворота сечений в месте разреза в направлении X1, а δ2P и δ3P - расхождения тех же сечений в направлении сил X2 и X3 (рисунок 12.5) от заданной нагрузки.
Часто одну и ту же стержневую систему можно рассматривать как внешне статически неопределимую, если удалять опорные связи, или как внутренне статически неопределимую, если удалять внутренние связи (рисунок 12.6).
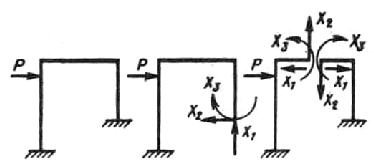
Рисунок 12.6.
В канонических уравнениях совместности перемещений для систем, в которых избыточными являются одновременно внешние и внутренние связи, одна часть коэффициентов - абсолютные, а другая - относительные перемещения сечений этих систем.