

Связь компонентов внутренних сил с напряжениями
Как отмечалось выше, в каждом сечении F главный вектор и главный момент внутренних сил имеют 6 компонентов и в каждой точке этого сечения действуют нормальные напряжения касательные напряжения (рисунок 3.4). Суммируя элементарные силы, распределенные по сечению и их моменты относительно координатных осей, получим
|
(3.5) |
 .
.
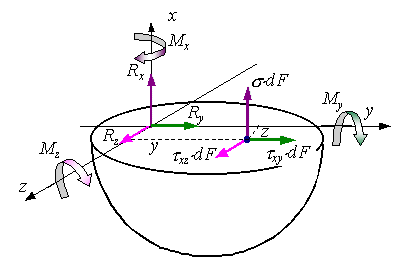
Рисунок 3.4. Связь компонентов внутренних сил с напряжениями
Таким образом, зная закон распределения по сечению напряжений, можно найти компоненты внутренних сил. В формуле (3.5) обозначения компонентов главного вектора и главного момента модифицированы в соответствии с деформациями, вызываемыми ими.
Определение напряжений на наклонных площадках
Для определения напряжений на произвольной наклонной площадке введем следующую индексацию координатных осей: x – 1, y – 2, z - 3, то есть индексы, имеющие ту или иную цифровую индексацию, соответствуют указанным координатным осям. Так, например, вектор направляющих косинусов внешней нормали n к наклонной площадке abc (см. рисунок 3.5), имеет вид:
|
(3.6) |
 .
.Матрица компонент напряженного состоянии имеет следующий вид:
|
(3.7) |
 .
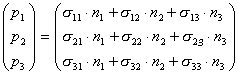
.Очевидно, что диагональные элементы указанной матрицы представляют собой нормальные напряжения, а не диагональные элементы – касательные напряжения. Тогда компоненты вектора полного напряжения p на наклонной площадке abc по координатным осям определятся из следующего уравнения:
|
(3.8) |
или более подробно:
|
(3.9) |
 .
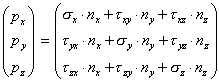
.В обычной форме записи, имеем:
|
(3.10) |
 .
.
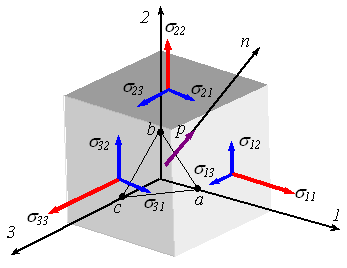
Рисунок 3.5. Напряжения на наклонной площадке
Нормальное напряжение на наклонной площадке abc определится проекцией вектора полного напряжения на нормаль из следующего уравнения:
|
(3.11) |
где pT - транспонированный вектор (3.9). Более подробно уравнение (3.11) можно представить в следующем виде (с учетом закона парности касательных напряжений (3.4)):
|
(3.12) |
Тогда касательное напряжение на наклонной площадке abc определится из следующего уравнения:
|
(3.13) |
где модуль вектора полного напряжения равен:
|
(3.14) |
Определение главных напряжений и главных площадок
Если по граням выделенного элементарного параллелепипеда действуют одни только нормальные напряжения, то они называются главными напряжениями, а площадки, на которых они действуют, называются главными площадками. Можно доказать, что в каждой точке напряженного тела существуют три главные взаимно перпендикулярные площадки (рисунок3.6.). Главные напряжения обозначают s1, s2, s3. При этом большее (с учетом знака) главное напряжение обозначается s1, а меньшее (с учетом знака) обозначается s3. Различные виды напряженного состояния классифицируются в зависимости от числа возникающих главных напряжений. Если отличны от нуля все три главных напряжения, то напряженное состояние называется трехосным или объемным (рисунок 3.6). Если равно нулю одно из главных напряжений, то напряженное состояние называется двухосным или плоским. Если равны нулю два главных напряжения, то напряженное состояние называется одноосным или линейным.
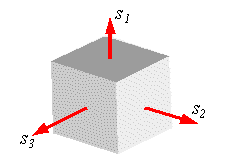
Рисунок 3.6. Главные напряжения
Для определения главных напряжений предположим, что площадка abc (рисунок 3.5) является главной площадкой. Тогда на ней будут действовать только нормальные напряжения, то есть главные напряжения будут равны полным напряжениям p. В этом случае компоненты вектора полного напряжения p1, p2, p3 можно рассматривать как проекции главных напряжений на оси координат:
|
(3.15) |
Подставив это условие в уравнение (3.9), получим
|
(3.16) |
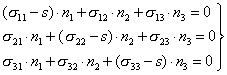 .
.Эти уравнения можно рассматривать как систему линейных однородных уравнений относительно направляющих косинусов. В силу известного соотношения:
|
(3.17) |
направляющие косинусы не могут одновременно иметь нулевые значения. В этом случае определитель, составленный из коэффициентов системы (3.16) должен быть равен нулю:
|
(3.18) |
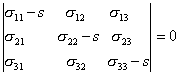
Раскрыв определитель, получим характеристическое уравнение третьего порядка:
|
(3.19) |
где коэффициенты
|
(3.20) |
|
(3.21) |
|
(3.22) |
называются инвариантами напряженного состояния в точке, так как они не изменяют своей величины при изменении направления исходной системы прямоугольных координат. Можно доказать существование трех действительных корней уравнения (3.19). На основании этого можно считать, что в каждой точке тела, независимо от его формы и размеров, места приложения, вида и характера нагрузок, существует не более трех взаимно ортогональных главных напряжения.
Для определения положения главных площадок необходимо знать направляющие косинусы нормали к этой площадке. Для их определения следует воспользоваться системой уравнений (3.16). Однако равенство нулю определителя этой системы указывает на то, что не все уравнения системы являются линейно независимыми; одно из них есть следствие двух других. Чтобы сделать систему определенной, надо добавить к ней равенство (3.17). После этого число независимых уравнений становится достаточным для однозначного определения направляющих косинусов.