

1.3 Кинематические цепи
Кинематической цепью называют систему звеньев, подвижно связанных между собой кинематическими парами. Кинематические цепи делятся на 3 группы по следующим основным признакам:
1. Простые и сложные.
Кинематическая цепь называется простой, если каждое звено её входит не более чем в две кинематические пары. Пример простой кинематической цепи приведен на Рисунокунке 1.15. Это шарнирно-рычажный четырёхзвенник, состоящий из четырёх звеньев (рычагов), шарнирно соединённых между собой. Каждое его звено входит не более чем в две кинематические пары. Кинематическая цепь называется сложной, если в ней есть хотя бы одно звено, входящее более чем в две кинематические пары. Пример сложной кинематической цепи, представленной шарнирным шестизвенником, приведен на Рисунокунке 1.16. В этой схеме звено 3 и звено 6 входят в три кинематические пары.
2. Замкнутые и разомкнутые.
Кинематическая цепь называется разомкнутой, если в ней есть хотя бы одно звено, входящее в одну кинематическую пару. Пример разомкнутой кинематической цепи (манипулятор) показан на рисунке 1.17. В этой схеме звенья 1 и 4 входят только в одну кинематическую пару. Кинематическая цепь называется замкнутой, если каждое звено её входит не менее чем в две кинематические пары. Примеры замкнутых кинематических цепей (КЦ) приведены на рисунках 1.15. и 1.16.
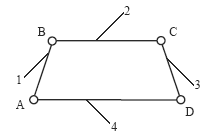
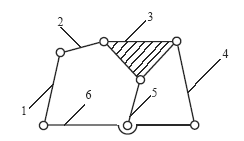
Рисунок. 1.15. Простая КЦ Рисунок. 1.16. Сложная КЦ
3. Плоские и пространственные.
Кинематическая цепь называется плоской, если каждое звено её относительно других звеньев движется плоско. Примеры плоских кинематических цепей показаны на рисунках 1.15. и 1.16, где звенья друг относительно друга движутся плоско. Кинематическая цепь называется пространственной, если в ней есть хотя бы два звена, относительное движение которых не плоское. Примером пространственной кинематической цепи является манипулятор, кинематическая схема которого приведена на рисунке 1.17. В ряде случаев удобно вместо кинематической пары, сложной в изготовлении, заменить её кинематической цепью. Например, вращательная пара может быть заменена шарикоподшипником, шаровой шарнир - карданной передачей (рис. 1.18.). Пространственные кинематические цепи широко используются при проектировании манипуляторов и роботов [4].
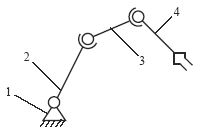
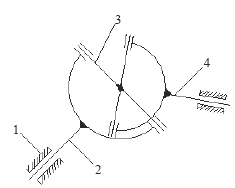
Рисунок 1.17 - Разомкнутая КЦ Рисунок 1.18 - Карданный шарнир
Кинематическим соединением называется кинематическая цепь, конструктивно заменяющая в механизме кинематическую пару. В ряде случаев рационально кинематические пары I-IV классов заменять эквивалентными кинематическими цепями, образованными парами V класса для повышения несущей способности конструкции, снижения потерь на трение, упрощения технологии изготовления. Так, например, шарикоподшипник взамен вращательной пары (рис. 1.9.а) позволит снизить трение в паре. Изготовление карданного шарнира более экономично и технологично, нежели сферическая пара с пальцем (рис. 1.10.).
Механизм от кинематической цепи отличается наличием стойки. В механизме рассматривают движение всех звеньев относительно неподвижного звена (стойки). Если одно из звеньев кинематической цепи сделать неподвижным, кинематическая цепь превращается в механизм. Таким образом, механизмом называется кинематическая цепь, у которой одно звено неподвижно, а движение остальных звеньев относительно стойки определены или заданы. В качестве неподвижного звена, как правило, выбирается корпус машины, хотя он может быть и подвижным (автомобиль, самолёт и т. д.).