

3.2 Силы инерции звеньев плоского механизма
Как известно из
теоретической механики, бесчисленное
множество элементарных сил инерции
точек твердого тела – звена – приводится
к главному вектору
![]() и
главному моменту
и
главному моменту
![]() сил инерции. При всех видах движения
звеньев плоского механизма
сил инерции. При всех видах движения
звеньев плоского механизма
![]() и
и
![]() определяются следующим образом.
определяются следующим образом.
![]()
![]() (3.1)
(3.1)
где i – номер звена,
mi – его масса,
![]() – ускорение его
центра масс Si.
– ускорение его
центра масс Si.
Точкой приложения
главного вектора сил инерции
![]() звена является центр масс Si
этого
звена, а направлен
в сторону, противоположную направлению
ускорения
центра масс (см. уравнение 3.1)
звена является центр масс Si
этого
звена, а направлен
в сторону, противоположную направлению
ускорения
центра масс (см. уравнение 3.1)
![]() , (3.2)
, (3.2)
где i – номер звена,
Isi – момент инерции этого звена относительно оси, проходящей через центр масс Si звена перпендикулярно плоскости траектории центра масс,
![]() -
угловое ускорение звена.
-
угловое ускорение звена.
Как следует из
уравнения (3.2),
![]() направлен противоположно угловому
ускорению звена.
направлен противоположно угловому
ускорению звена.
В ряде случаев бывает удобно, а иногда – необходимо представить приложенные к звену моменты сил (в том числе ) в виде пар сил (см. примеры на рис. 3.1 и 3.2).
На рис. 3.1
представлена замена момента
![]() парой
сил
парой
сил
![]() и
и
![]() .
Эквивалентность замены требует, чтобы
модуль и направление момента заменяющей
пары сил были такими же, как модуль и
направление заменяемого момента сил
Ми2.
Т.к.
неизвестны модули сил заменяющей пары
сил, их направления, точки приложения
и плечо пары h2,
то можно принять
.
Эквивалентность замены требует, чтобы
модуль и направление момента заменяющей
пары сил были такими же, как модуль и
направление заменяемого момента сил
Ми2.
Т.к.
неизвестны модули сил заменяющей пары
сил, их направления, точки приложения
и плечо пары h2,
то можно принять
![]() и приложить ее в точке S2
. Далее
нужно определить величину плеча h2
из
условия эквивалентности замены:
и приложить ее в точке S2
. Далее
нужно определить величину плеча h2
из
условия эквивалентности замены:
 .
.
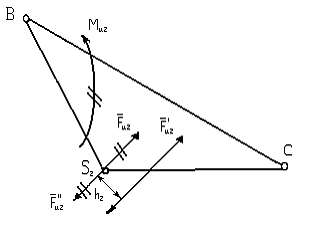
Рисунок 3.1
– Замена
и
![]() одной силой
одной силой
Отложив с учетом
масштабного коэффициента длины
![]() плечо h2
(см. рис. 3.1)
от линии действия
плечо h2
(см. рис. 3.1)
от линии действия
![]() таким образом, чтобы направление момента
заменяющей пары сил
совпадало с направлением заменяемого
момента сил
,
изображаем вторую силу пары
.
Теперь
исключаем из рассмотрения, как замененный
парой сил. Силы
равны по величине и противоположны по
направлению, их сумма равна нулю,
следовательно, их можно не учитывать в
расчетах.
таким образом, чтобы направление момента
заменяющей пары сил
совпадало с направлением заменяемого
момента сил
,
изображаем вторую силу пары
.
Теперь
исключаем из рассмотрения, как замененный
парой сил. Силы
равны по величине и противоположны по
направлению, их сумма равна нулю,
следовательно, их можно не учитывать в
расчетах.
Таким образом, система нагрузок и заменена одной силой .
Иногда изображение плеча h2 неудобно помещать на чертеже (например, ввиду значительной его величины). В таком случае замену момента сил можно осуществить так, как это показано на рис. 3.2.
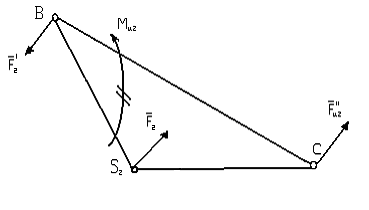
Рисунок 3.2 – Замена парой сил
В качестве плеча
заменяющей пары сил
![]() и
и
![]() выберем
выберем
![]() ,
а в качестве точек приложения – точки
В
и С.
Тогда
,
а в качестве точек приложения – точки
В
и С.
Тогда
![]() =
=![]() =
=![]() .
.
Ясно, что линии действия и перпендикулярны отрезку ВС.
В этом случае
![]() в преобразованиях не участвует и в
дальнейших расчетах должна быть учтена
(в отличие от замененного
,
вместо которого следует учитывать
и
).
в преобразованиях не участвует и в
дальнейших расчетах должна быть учтена
(в отличие от замененного
,
вместо которого следует учитывать
и
).
Таким образом, для удобства выполнения последующих расчетов все внешние нагрузки, приложенные к звеньям механизма, будут представлены только силами (моменты сил будут отсутствовать в связи с вышеупомянутыми их заменами).