

Из прямоугольного треугольника adPc определяем
![]()
Но 2cos sin = sin2, следовательно
![]()
Таким образом, высота зуба эвольвентного колеса до постоянной хорды равна:
=ra – r – 0,25m(0,5 + 2xtg)sin2, или
=![]() .
(8.34)
.
(8.34)
Длина общей нормали (размер под скобу)
Общая нормаль – это нормаль к нескольким эвольвентам одной и той же основной окружности. Этот размер измеряется скобой и контролирует шаги на нарезаемом колесе.
Изобразим несколько зубьев эвольвентного колеса, охватываемых скобой, например три зуба – рисунок 8.22.

Рисунок 8.22 – Длина общей нормали
В точке С проведем касательную к основной окружности, которая по свойству эвольвенты будет нормалью к эвольвентам в точках А и В. Отрезок АВ и есть длина общей нормали W, измеряемая скобой, губки которой располагаются по касательной к охватываемым эвольвентам.
В соответствии со свойствами эвольвенты расстояния по нормали между двумя эвольвентами одной основной окружности всюду одинаковы и равны расстоянию между началами этих эвольвент по дуге основной окружности. Поэтому не обязательно, чтобы скоба строго фиксировалась в определенном положении, важно чтобы ее губки касались эвольвентных профилей зубьев.
Обозначим точки начала эвольвент на основной окружности А0 и В0.
В соответствии с изложенным выше свойством эвольвенты
W = AB = A0B0.
Обозначим число впадин, охватываемое скобой, индексом n. Из рисунка 8.22 видно, что число впадин, охватываемое скобой, совпадает с числом шагов, охватываемых зубьев колеса. Таким образом, длина дуги А0В0 по основной окружности, как видно из рисунка, равна:
A0B0 = Pbn + Sb .
Следовательно, длина общей нормали
W = Pbn + Sb . (8.35)
Определим, чему равен шаг зубьев эвольвентного колеса по основной окружности.
По свойству
эвольвенты
![]() ;
но
;
но
![]() ,
т.е.
,
т.е.
![]() ,
,
Следовательно,
и
![]() ,
или
,
или
![]() (8.36)
(8.36)
Определим число впадин n, (оно же – число шагов), охватываемое скобой. Это число определяется из условия, чтобы точки касания губок скобы с зубьями находились вблизи делительной окружности. Тогда при измерении W гарантировано касание скобы с эвольвентными участками зубьев.
Если скоба касается
эвольвент в точках, расположенных на
делительной окружности, то угол,
охватываемый скобой, равен 2
(рисунок 8.22), где
- угол давления на делительной окружности,
равный профильному углу рейки, то есть
= 200.
Если учесть, что угол, соответствующий
одному шагу, равен
![]() ,
то число шагов, расположенных в пределах
угла 2,
то есть охватываемых скобой, будет
равно:
,
то число шагов, расположенных в пределах
угла 2,
то есть охватываемых скобой, будет
равно:
![]() (8.37)
(8.37)
Если
![]() получается дробное число, то нужно
принимать n,
равное целой части дроби.
получается дробное число, то нужно
принимать n,
равное целой части дроби.
Виды зацеплений. Плотное зацепление.
Уравнение плотного зацепления
Эвольвентное зацепление характеризуется коэффициентами смещения каждого из колес – х1 и х2 , а также суммарным коэффициентом смещения, который равен алгебраической сумме коэффициентов смещения х1 и х2:
х = х1 + х2 .
В зависимости от х1 , х2 и х различают три вида зацеплений прямозубых эвольвентных колес:
Нулевое зацепление (некорригированное). Это зацепление, в котором
х1 = 0, х2 = 0, х = х1 + х2 = 0.
Равносмещенное зацепление (зацепление с высотной коррекцией).
Это зацепление, в котором
х1 > 0, x2 < 0, x = x1 + x2 =0, то есть x1 = -x2
Неравносмещенное зацепление (зацепление с угловой коррекцией).
Это зацепление, в котором х 0.
В этом зацеплении возможны различны варианты значений х1 и х2:
х1 0, х2 = 0;
х1 > 0, x2 < 0, причем х1 -х2;
х1 > 0, x2 > 0.
Наиболее распространенным является вариант, когда х1 > 0, x2 > 0,
следовательно и х 0.
Правильное эвольвентное зацепление теоретически должно быть плотным.
Плотным называется такое зацепление, в котором зуб одного колеса плотно расположен во впадине второго колеса, соприкасаясь с его двумя зубьями, т. е. это зацепление без бокового зазора – рисунок 8.23.
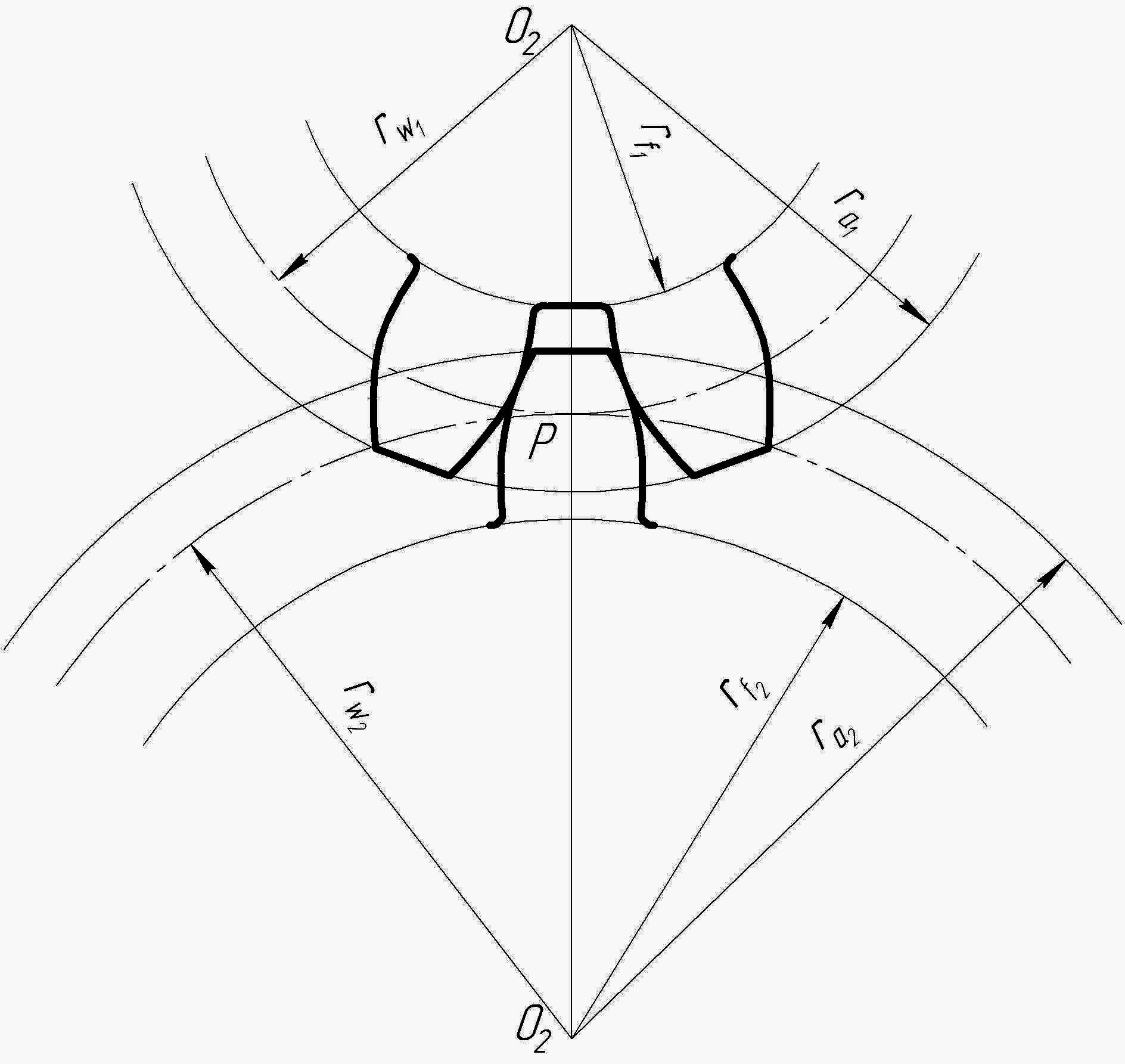
Рисунок 8.23. – Плотное эвольвентное зацепление
Практически небольшой боковой зазор должен быть предусмотрен по следующим причинам:
для проникновения смазки между зубьями;
для возможности температурного расширения зубьев от их нагревания во время работы передачи;
для возможности сборки зубчатого зацепления и предотвращения заклинивания зубьев в случае неточно выполненного межосевого расстояния.
Поэтому при изготовлении каждого зубчатого колеса предусматриваются обязательные допуски на контролируемые размеры, обеспечивающие гарантированный боковой зазор. Нормальные же размеры и параметры зацепления определяются из условия плотного зацепления.
Шаг по начальной окружности любого колеса равен сумме толщины зуба и ширины впадины:
w = Sw1+ ew1 или
w = Sw2+ ew2
Зацепление плотное, если толщина зуба по начальной окружности одного колеса равна ширине впадины по начальной окружности другого колеса, т.е. если
Sw1 = ew2 и ew1 = Sw2 , тогда
w = Sw1+ Sw2 . (8.38)
Это условие плотного зацепления: шаг по начальной окружности равен сумме толщин зубьев колес по начальным окружностям.
Найдем шаг по начальной окружности через длину начальной окружности и количество зубьев первого колеса.
![]()
Толщины зубьев колес по начальным окружностям равны (см. 8.8 ):
![]()
![]()
Подставим полученные значения в формулу (8.38):
![]()
![]()
Умножим
левую и правую части уравнения на
выражение
![]() :
:
![]()
Так
как
![]() то получаем:
то получаем:
= 0,5 + 2x1tg + z1in - z1inw + 0,5 + 2x2tg + z2in - z2inw , или
(z1 + z2) inw = 2(x1 + x2)tg + (z1 + z2)in.
Из полученного уравнения определим inw , разделив левую и правую части на
z1 + z2 = z :
 (8.39)
(8.39)
Это основное уравнение плотного зацепления, которое характеризует параметры всех видов зацеплений. Так как tg = tg200 и in = 0,014904 – величины постоянные, то из уравнения (8.39) видно , что угол зацепления w при заданных числах зубьев колес зависит только от суммарного коэффициента смещения x.
Для нулевого и равносмещенного зацеплений x = 0.
Тогда
![]() inw
=
in;
w
=
=200
inw
=
in;
w
=
=200
Для неравносмещенного зацепления х 0, тогда inw in, w .
При
х
> 0;
 >
0;
w
> .
>
0;
w
> .