

9.2 Основные параметры кулачковых механизмов
9.2.1 Теоретический и практический профили кулачка
Рассмотрим работу кулачкового механизма, изображенного на рис.9.5. Пусть кулачок 1 движется с некоторой постоянной скоростью Vк=const. Тогда заостренный конец толкателя будет перемещаться в вертикальном направлении по некоторому закону SТ=f(t), обусловленному профилем кулачка. Поскольку Vк=const, то путь перемещения толкателя можно выразить как функцию перемещения кулачка Sт=f2(Sк). Каждому перемещению кулачка будет отвечать соответствующее перемещение толкателя. В результате износа толкателя и профиля кулачка это соотношение нарушается. Профиль кулачка, по которому перемещается заостренный конец толкателя, называется теоретическим профилем кулачка.
Во избежание быстрого износа поверхностей кулачка и толкателя последний снабжается роликом. Но если ролик будет перекатываться по теоретическому профилю кулачка, закон движения толкателя нарушится. Чтобы при постановке ролика сохранить закон движения толкателя, центр ролика ставят в острие толкателя. Центр ролика будет перемещаться по теоретическому профилю кулачка. Изобразим ряд положений центра ролика на теоретическом профиле кулачка и изобразим ряд положений ролика. Если провести огибающую кривую по внешнему диаметру ролика - получим практический (действительный) профиль кулачка. Можно заметить, что расстояния между теоретическим и практическим профилем кулачка по нормали везде одинаковы и равны радиусу ролика.
Теоретический и практический профили кулачка представляют собой эквидистантные кривые, т.е. кривые, равностоящие друг от друга по нормали к поверхностям.
При проектировании кулачковых механизмов по заданному закону движения толкателя находят теоретический профиль кулачка, а затем строят действительный профиль как эквидистантную кривую.
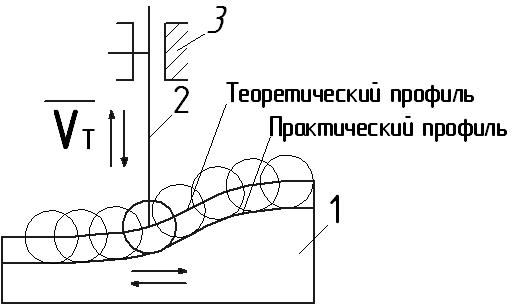
Рисунок 9.5 – Теоретический и практический профили кулачка
9.2.2 Цикл работы кулачкового механизма с вращающимся кулачком
Циклом работы кулачкового механизма называется время, в течение которого толкатель проходит полное перемещение и возвращается в исходное положение.
Полный цикл работы кулачкового механизма соответствует времени одного оборота кулачка, т.е. повороту кулачка на 360°. В таком механизме законом движения толкателя является зависимость его перемещения SТ от угла поворота кулачка φк : Sт=f(φк).
Полный цикл работы кулачкового механизма может включать четыре этапа - фазы цикла.
1. Фаза удаления - соответствует удалению толкателя из крайнего ближнего положения по отношению к центру вращения кулачка в крайнее дальнее положение. Соответствующий этому движению угол поворота кулачка называется углом удаления (φу).
2. Выстой толкателя в крайнем дальнем по отношению к центру вращения кулачка положении. Соответствующий этому этапу угол поворота кулачка называется углом дальнего стояния (φд).
3. Возвращение толкателя из крайнего дальнего положения в крайнее ближнее по отношению к центру вращения кулачка положение - фаза возвращения. Соответствующий этому движению толкателя угол поворота кулачка называется углом возвращения (φв).
4. Выстой толкателя в крайнем ближнем по отношению к центру вращения кулачка положении - фаза ближнего выстоя. Соответствующий этому этапу угол поворота кулачка называется углом ближнего стояния (φб)
5. В зависимости от того, какой закон движения толкателя необходимо получить некоторые фазы могут отсутствовать (фазы выстоя, например), могут быть равны или могут повторяться. Самый распространенный вариант такой, при котором фазовые углы не повторяются и ни один из них не равен нулю.
Поскольку все фазы совершаются в течение цикла - полного оборота кулачка, то сумма всех фазовых углов равна 360°.
φу+φд+φв+φб=3600.
Фазовые углы назначаются конструктором исходя из технологического процесса, выполняемого машиной. Требуемый закон движения толкателя может быть задан в виде функции Sт=f1(t)=f2(φ), в виде таблиц или в виде графиков.
360
угол поворота кулачка |
φу |
φд |
φв |
φб |
Этапы движения толкателя |
Подъем |
стояние в верхнем положении |
возвращение |
стояние в нижнем положении |
Рисунок 9.6 – Прямоугольная циклограмма работы кулачкового механизма
Графическое изображение согласованности движения звеньев кулачкового механизма внутри цикла называется циклограммой.
Циклограмма может быть изображена в виде прямоугольников, может быть круговой (в виде секторов).