

Свойства эвольвентного зацепления
Рассмотрим прямозубое эвольвентное зацепление. Это зацепление, в котором эвольвентные поверхности зубьев образуются линиями, параллельным осям вращения основных цилиндров. Эвольвентное зацепление будет правильным, если в контакте находятся две эвольвентные поверхности, оси вращения которых совпадают с осями вращения основных цилиндров. При изучении свойств эвольвентного зацепления рассматривается сечение его плоскостью, перпендикулярной осям вращения основных цилиндров (торцевой плоскостью).
Изобразим две эвольвенты, контактирующие в точке А и вращающиеся вокруг центров О1 и О2 своих основных окружностей (рисунок 8.9). Пусть эвольвента Э1 вращается с угловой скоростью 1 и в точке контакта А передает движение эвольвенте Э2 , которая будет вращаться вокруг оси О2 с угловой скоростью 2. Рассмотрим свойства полученного эвольвентного зацепления.
1.
В эвольвентном зацеплении передаточное
отношение
![]() постоянно.
постоянно.
Докажем
это. В соответствии с основной теоремой
зацепления для постоянства передаточного
отношения необходимо, чтобы точка
пересечения общей нормали к контактирующим
эвольвентам с межосевой линией О1О2
– точка Р занимала на этой линии
постоянное место. В точке контакта А
проводим общую нормаль к эвольвентам,
которая по свойству эвольвенты № 3
является общей касательной к основным
окружностям. Точка пересечения этой
линии с межосевой линией О1О2
– точка Р и передаточное отношение
![]() .
.
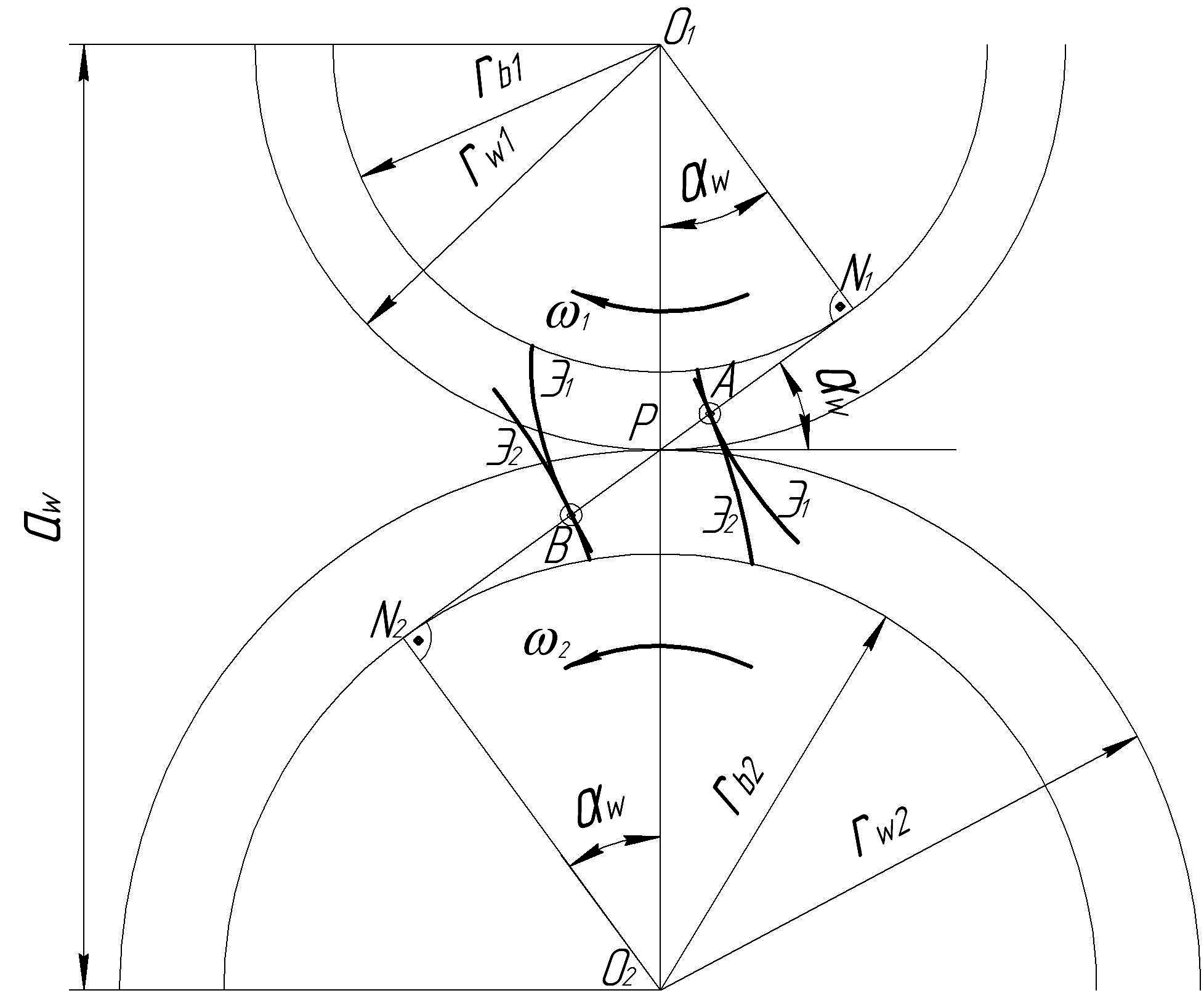
Рисунок 8.9 - К свойствам эвольвентного зацепления
Пусть
через некоторый промежуток времени
эвольвенты Э1
и Э2
займут новое положение и будут
контактировать в точке В. Если в точке
В провести общую нормаль к эвольвентам,
чтобы получить точку Р, то по свойству
эвольвенты № 3 это должна быть опять
общая касательная к основным окружностям,
которая уже проведена. Следовательно,
точка Р сохраняет свое неизменное
положение на линии центров О1О2
, поэтому
![]() ,
а значит и
,
а значит и
![]() .
.
2. В эвольвентном зацеплении передаточное отношение равно обратному отношению радиусов основных окружностей и не зависит от межосевого расстояния.
Из
точек О1
и О2
проведем перпендикуляры на общую
касательную к основным окружностям,
получим точки касания N1
и
N2.Треугольники
О1N1P
и
О2N2Р
подобны по равенству углов, следовательно
![]() ;
;
![]() ,
,
![]() ,
значит
,
значит
 ,
,
а
так как
![]() , то
, то
 . (8.10)
. (8.10)
Радиусы основных окружностей не зависят от межосевого расстояния aw . Следовательно, в эвольвентном зацеплении передаточное отношение сохраняется неизменным при изменении межосевого расстояния, которое имеет место в неравносмещенном зацеплении (см. 8.10) или при погрешностях, допущенных в процессе изготовления корпусов редукторов.
3. В соответствии с основной теоремой зацепления
,
![]() ,
,
![]() ,
,
![]() ,
,
следовательно
![]() , то есть линейные скорости в точке Р
равны, а это значит, что окружности колес
1 и 2, проведенные через точку Р , катятся
друг по другу без скольжения.
, то есть линейные скорости в точке Р
равны, а это значит, что окружности колес
1 и 2, проведенные через точку Р , катятся
друг по другу без скольжения.
Две соприкасающиеся окружности, которые в процессе зацепления катятся друг по другу без скольжения, называются начальными окружностями, а точка их касания Р называется полюсом зацепления.
Радиусы начальных окружностей обозначаются rw1 и rw2 .
Эвольвента не имеет начальной окружности, если она не контактирует с другой эвольвентой. Начальные окружности–это параметр зацепления. С увеличением межосевого расстояния радиусы начальных окружностей увеличиваются , с уменьшением –уменьшаются.
4. Введем понятие линии зацепления.
В любом зацеплении существует траектория, которую описывает точка контакта профилей в абсолютном движении. Эта траектория называется линией зацепления.
В эвольвентном зацеплении точка контакта эвольвент перемещается по линии N1N2.
Следовательно, в эвольвентном зацеплении линия зацепления – это прямая, совпадающая с общей касательной к основным окружностям, она же – общая нормаль к контактирующим эвольвентам N1N2.
5. Введем понятие угла зацепления.
В общем случае угол зацепления, это угол между касательной к линии зацепления и перпендикуляром к межосевой линии.
В эвольвентном зацеплении касательная к линии зацепления совпадает с общей нормалью N1N2 , которая и является линией зацепления. Через полюс зацепления Р проведем линию, перпендикулярную межосевой линии О1О2. Угол между ними – угол зацепления w.
В эвольвентном зацеплении угол зацепления – это угол между общей нормалью к эвольвентам и линией, перпендикулярной линии центров.
С увеличением межосевого расстояния aw угол зацепления w увеличивается, с уменьшением – уменьшается. Угол зацепления является параметром зацепления.
6. Связь между параметрами эвольвентных колес и параметрами зацепления.
Из подобия треугольников О1N1P и O2N2P следует, что N1O1P = N2O2P.
Стороны угла зацепления w перпендикулярны сторонам этих углов. Следовательно: N1O1P = N2O2P = aw
Из рассмотренных треугольников определим радиусы основных окружностей rb1 и rb2 через угол зацепления w и радиусы начальных окружностей rw1 и rw2 .
O1N1 = O1P cosw , O2N2 = O2P cosw ,
rb1 = rw1 cosw , rb2 = rw2 cosw ,
то есть rb = rw cosw . (8.11)
Здесь rb – параметр колеса, rw , w – параметры зацепления.