

Определение радиусов начальных окружностей, межосевого расстояния и высоты зуба
Изобразим основные окружности зубчатых колес 1 и 2, линию зацепления, и обозначим параметры зацепления: радиусы начальных окружностей rw1 и rw2, угол зацепления w и межосевое расстояние aw - рисунок 8.24.
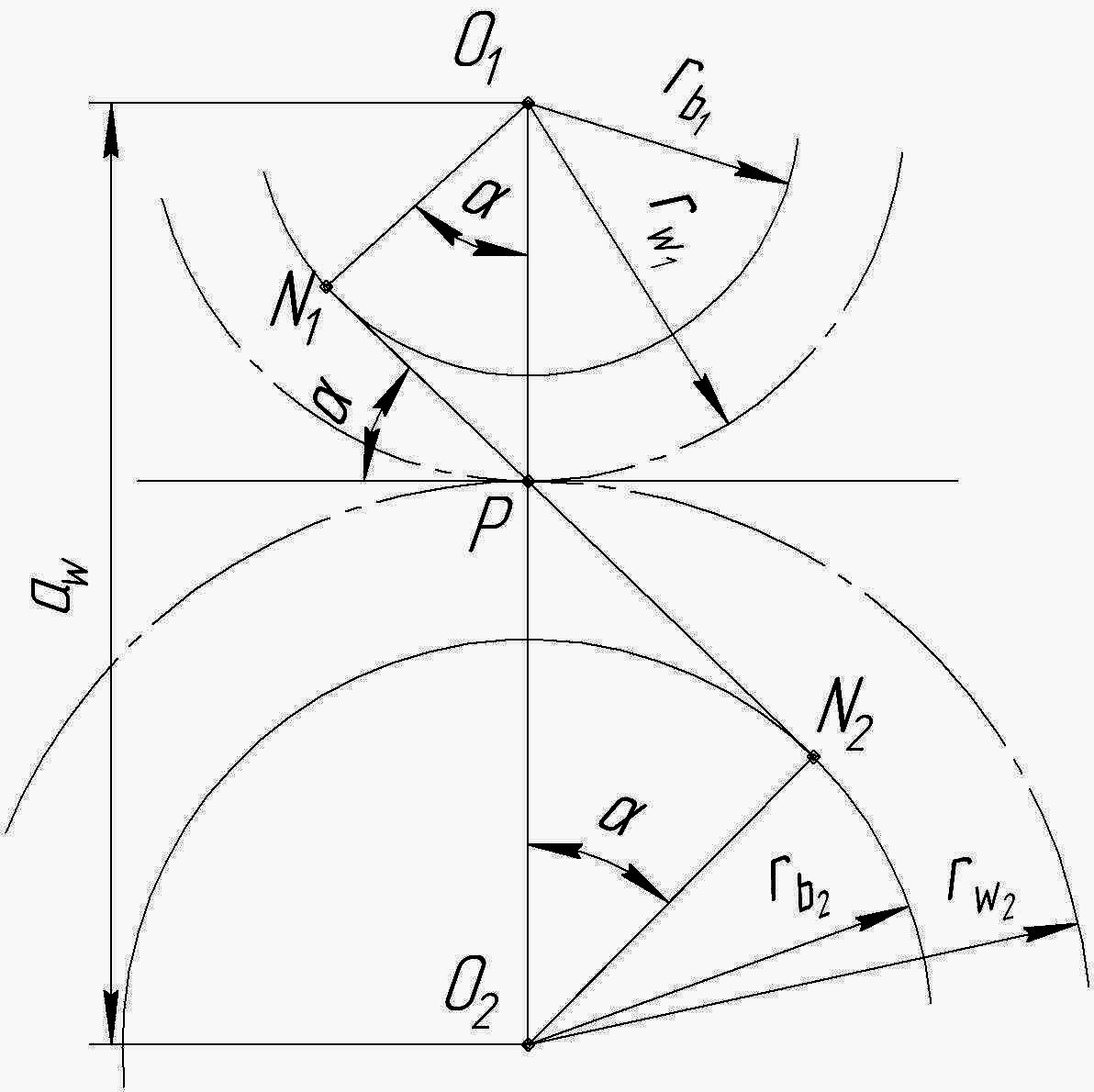
Рисунок 8.24 – К определению радиусов начальных окружностей
и межосевого расстояния
Из O1N1P (или O2N2P) получаем:
rb = rw cosw (8.40)
При нарезании эвольвентного зубчатого колеса инструментальной рейкой получено (см. (8.15)), что rb = cos, следовательно
rwcosw = rcos, откуда получаем
![]() (8.41)
(8.41)
Анализируя
полученное равенство, видим, что в
нулевом и равносмещенном зацеплениях,
когда w
= ,
![]() ,
тогда rw
= r,
т.е. в
нулевом и равносмещенном зацеплениях
радиусы начальных и делительных
окружностей одинаковы.
,
тогда rw
= r,
т.е. в
нулевом и равносмещенном зацеплениях
радиусы начальных и делительных
окружностей одинаковы.
В
неравносмещенном зацеплении w
,
![]() ,
следовательно, rw
r.
,
следовательно, rw
r.
Межосевое расстояние (рисунок 8.24):
![]() (8.42)
(8.42)
Подставив значение r1 и r2, получим:
![]() (8.43)
(8.43)
Анализируя формулу (8.43), видим ,что в нулевом и равносмещенном зацеплениях, где w = , межосевое расстояние равно:
Aw = 0,5mZ.
В неравносмещенном зацеплении w и w 0,5mZ. При х > 0 w > и aw > 0,5mZ, то есть межосевое расстояние в таком зацеплении по сравнению с нулевым зацеплением увеличивается.
Для определения высоты зуба изобразим линию центров О1О2 и окружности впадин колес 1 и 2 – рисунок 8.25.
Определим расстояние между окружностями впадин:
= аw – rf1 – rf2
Этот размер вмещает высоту зуба h и радиальный зазор С (рисунок 8.25). Высота зуба может определяться одним из двух способов.
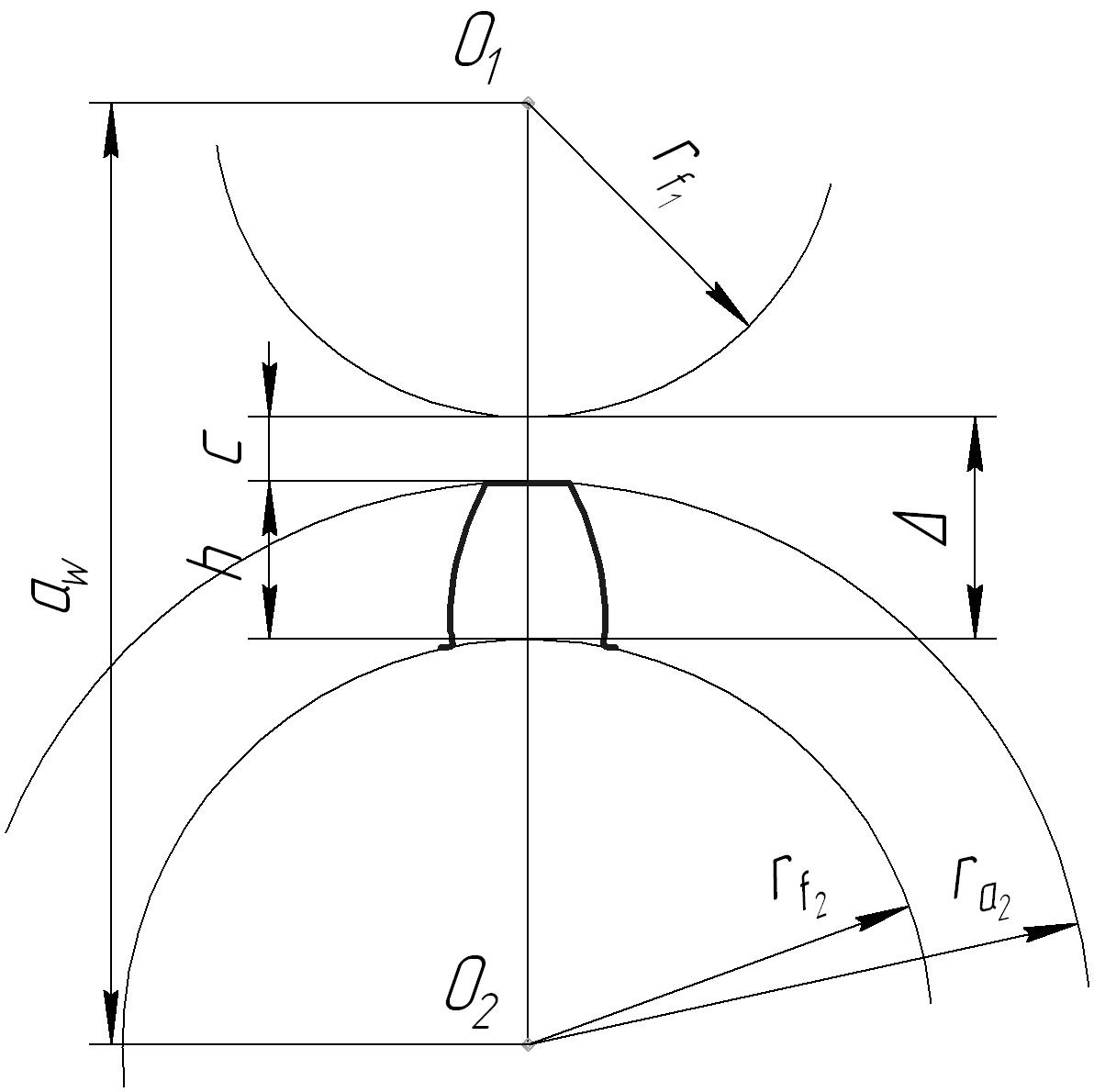
Рисунок 8.25 – Определение высоты зуба
Первый способ основан на том, что в любом зацеплении должен сохраняться радиальный зазор:
c = c*m
тогда h = - c*m = aw – rf1 – rf2 –c*m. (8.44)
Второй способ заключается в том, что сохраняется отношение высоты зуба к расстоянию в нулевом и корригированном зацеплениях.
![]()
Определим
![]() в
нулевом зацеплении, исходя из стандартных
размеров инструментальной рейки.
в
нулевом зацеплении, исходя из стандартных
размеров инструментальной рейки.

Подставим стандартные размеры зуба рейки:
![]()
Следовательно,
![]()
Тогда h = 0.9 = 0.9(aw – rf1 – rf2 ) (8.45)
Определив высоту зуба по формуле (8.44) или (8.45), определяем радиус окружности вершин ra (рисунок8.25)
ra = rf + h (8.46).
9 Кулачковые механизмы. Анализ и синтез
9.1 Назначение и основные виды
Кулачковые механизмы - широко распространенный в технике класс механизмов. Они предназначены для преобразования вращательного или поступательного движения ведущего звена в возвратно-поступательное или возвратно-вращательное движение ведомого звена, обеспечивая заданный закон его движения. В частности, можно получить закон движения ведомого звена, имеющий фазу выстоя – положения, в котором ведущее звено подвижно, а ведомое - неподвижно. Ни один стержневой механизм нам не дает возможность получить фазу выстоя. У стержневых механизмов только в крайних (мертвых) положениях мгновенная скорость ведомого звена может быть равна нулю.
Кулачковые механизмы широко используются в различных отраслях промышленности. Например, в автомобильной (газораспределительный механизм автомобиля), в автоматических линиях, в счетно-решающих устройствах, в автоматических системах управления различными процессами [1].
Кулачковый механизм содержит три основных звена: кулачок, толкатель и стойку.
По характеру относительного движения звеньев кулачковые механизмы делятся на плоские и пространственные.
Плоскими кулачковыми механизмами называются такие механизмы, у которых относительное движение всех звеньев плоское (движение происходит в одной или в параллельных плоскостях). Примеры плоских кулачковых механизмов приведены на рис. 9.1(а, б, в, г) и 9.2.
Пространственными кулачковыми механизмами называются такие, у которых есть хотя бы одно звено, относительное движение которого пространственное. Примеры пространственных кулачковых механизмов приведены на рис.9.3. Это вращающийся барабан 1 (ведущее звено), в криволинейном пазе которого размещается ролик 2, соединенный с толкателем 3, совершающим возвратно-вращательное (рис. 9.3а) или возвратно-поступательное (рис.9.3б) движение. В большинстве случаев ведущим звеном кулачковых механизмов является кулачок, форма профиля его определяется законом движения ведомого звена - толкателя. Движение кулачок получает извне - от различного рода двигателей или промежуточных звеньев машины.
Мы будем рассматривать только плоские кулачковые механизмы в связи с их анализом (определение закона движения звеньев по их заданным геометрическим параметрам) и синтезом (проектирование механизма по заданному закону движения звеньев).
Кулачковые механизмы различают также по виду движения ведущего и ведомого звеньев.
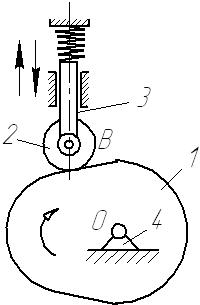
1. Вращающийся кулачок и поступательно движущийся толкатель. На рис.9.1а показан пример такого механизма. кулачок 1 вращается вокруг неподвижной оси О. Толкатель 3 совершает возвратно-поступательное движение. Толкатель получает движение через ролик 2 – дополнительное звено. Ролик 2 шарнирно соединен с толкателем 3. Он устанавливается для уменьшения трения между поверхностью кулачка и толкателя. Движение толкателя может быть с фазами выстоя (неподвижный толкатель при вращающемся кулачке) в зависимости от профиля кулачка.
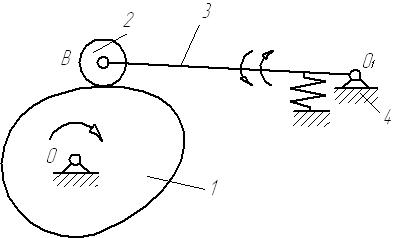
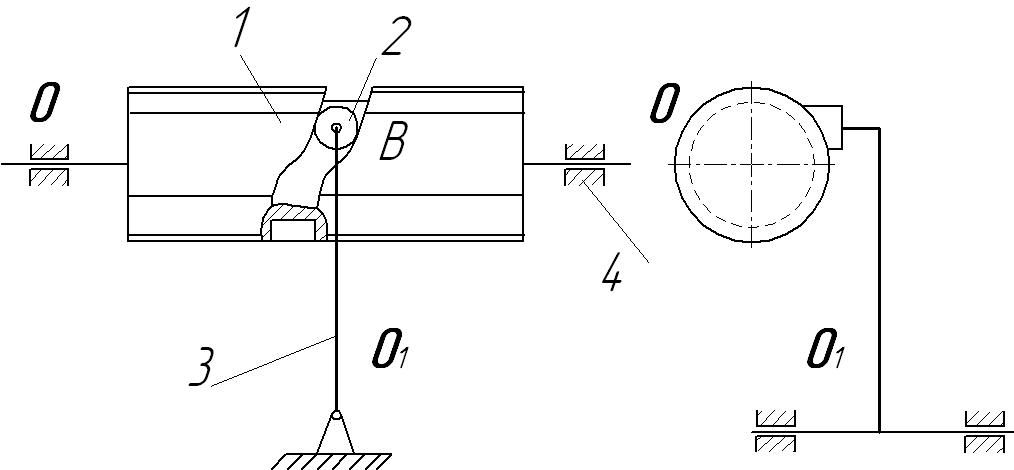
2. Вращающийся кулачок и вращающийся толкатель (рис.9.1б). Кулачок 1 вращается вокруг неподвижной оси О, через ролик 2 кулачок сообщает движение толкателю 3. Толкатель 3 совершает возвратно-вращательное движение вокруг оси О1..
а) б)
в) г)
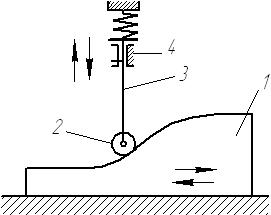
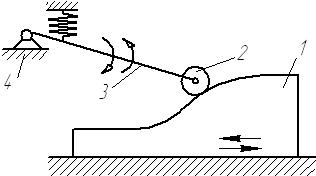
Рисунок 9.1 – Плоские механизмы с силовым замыканием
3. Поступательно движущийся кулачок и вращающийся толкатель (рис.9.1в). Кулачок 1 движется возвратно-поступательно вдоль неподвижной направляющей (станине 4) и сообщает движение контактирующему с ним через ролик 2 толкателю 3. Толкатель совершает возвратно-вращательное движение вокруг неподвижной оси О1.
4. Поступательно движущийся кулачок и поступательно движущийся толкатель (рис.9.1г). Кулачок 1 движется возвратно-поступательно относительно неподвижной горизонтальной направляющей 4 и сообщает движение толкателю 3. Толкатель 3, снабжённый роликом 2, совершает возвратно-поступательное движение в вертикальном направлении.
По характеру замыкания кулачковые механизмы подразделяются на 2 типа: с силовым и геометрическим замыканием.
а)
б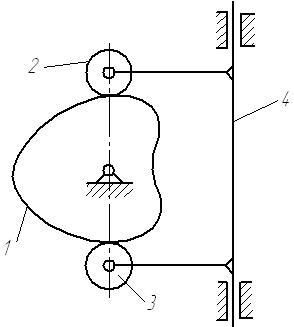 ) в)
) в)
Р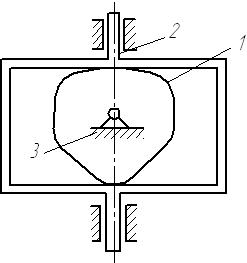 исунок
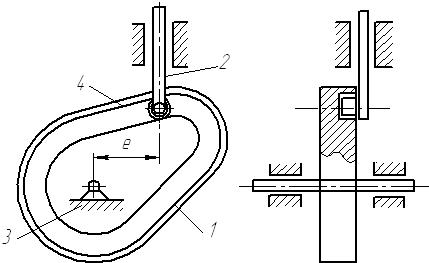
9.2 – Схемы механизмов с геометрическим
замыканием
исунок
9.2 – Схемы механизмов с геометрическим
замыканием
1. Кулачковые механизмы с силовым замыканием - это такие механизмы, у которых замыкание кинематической пары кулачок-толкатель происходит за счет сил веса звеньев или других дополнительных сил, например силы упругости пружины. В кулачковый механизм вводятся дополнительные элементы (пружины), обеспечивающие силовое замыкание кинематической пары. Все кулачковые механизмы, изображенные на рис. 9.1 имеют силовое замыкание за счет сил упругости пружин. На рис.9.1а, г – механизмы имеют пружины сжатия, на рис.9.1 б, в - пружины растяжения.
2. Кулачковые механизмы с геометрическим замыканием - это такие механизмы, у которых замыкание кинематической пары кулачок-толкатель происходит за счет геометрии профилей кулачка и толкателя. Геометрия либо
кулачка, либо толкателя такова, что замыкание кинематической пары кулачок-ролик гарантировано. Конструктивно геометрическое замыкание кулачок-ролик может быть выполнено в нескольких вариантах.
На рис.9.2а показан пазовый кулачок. В теле кулачка выполнен паз, в который заходит ролик толкателя. Здесь подъем толкателя осуществляется внутренней частью профиля паза кулачка (профилем меньшего размера), опускание - наружной частью паза (профилем большего размера). Ролик должен свободно размещаться в пазе - с гарантированным зазором. Поэтому при переходе с внутреннего на внешний профиль появляется мертвый ход ведомого звена -толкателя - за счет выбора зазора (люфта). В быстроходных передачах наличие люфта -приводит к возникновению удара при переходе с профиля на профиль. Это основной недостаток конструкции кулачкового механизма с пазовым кулачком.
На рис.9.2б показана конструкция геометрического замыкания кулачка с толкателем посредством применения 2х роликов на толкателе - сдвоенный толкатель. На рис.9.2в приведена конструкция рамочного толкателя. По существу работы рамочный толкатель не отличается от сдвоенного толкателя. Недостатки таких конструкций:
1) люфты вследствие наличия необходимого зазора между профилем кулачка и толкателем; люфт увеличивается вследствие износа;
2) невозможность получить любой закон движения толкателя, поскольку кулачок контактирует с толкателем в 2х противоположных точках, расстояние между которыми постоянно. Следовательно, закон движения толкателя может быть только симметричным.
По взаимному расположению оси вращения кулачка и оси движения толкателя плоские кулачковые механизмы могут быть центральными и нецентральными (с эксцентриситетом).
Если ось движения толкателя проходит через центр вращения кулачка -механизм центральный (рис.9.2б,в). Если ось движения толкателя смещена по отношению к оси вращения кулачка - механизм с эксцентриситетом (рис.9.1а, рис.9.2а). Эксцентриситет обозначается буквой е.
Конструктивно толкатели могут быть оформлены по - разному:
1. Остроконечный толкатель - толкатель контактирует с кулачком в точке - заостренным концом (рис.9.4а) Основной недостаток такой конструкции - быстрый износ толкателя. Такая конструкция толкателей применяется очень редко.
2. Грибовидный толкатель - толкатель контактирует с кулачком скругленным (грибовидным) концом (рис. 9.4б). Теоретически толкатель контактирует с кулачком, как и в предыдущей конструкции тоже в точке. Недостаток - быстрый износ толкателя и профиля кулачка.
Плоский (тарельчатый) толкатель (рис.9.4в). Толкатель контактирует с кулачком по линии. Износ профиля кулачка и толкателя меньше, чем у 2х предыдущих типов толкателей. Однако профиль кулачка при этом должен быть выпуклым, а это приводит к возрастанию габаритов кулачкового механизма.
Роликовый толкатель. Толкатель контактирует с профилем кулачка через промежуточное звено - ролик. Ролик перекатывается по поверхности кулачка. Трение скольжения заменяется трением качения, что приводит к уменьшению износа поверхности кулачка (рис.9.1, 9.2а, б, 9.3).
а)
б)
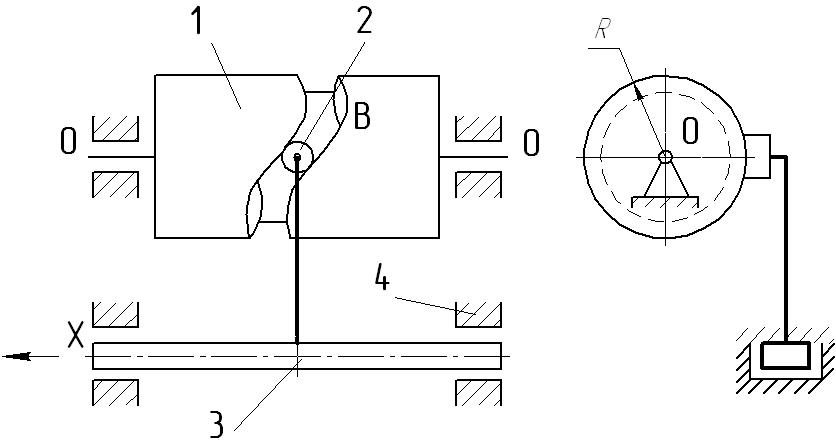
Рисунок 9.3. – Пространственные кулачковые механизмы
а) б) в)
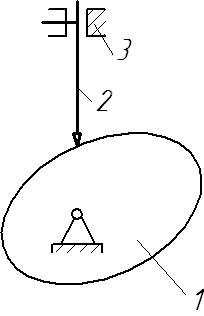
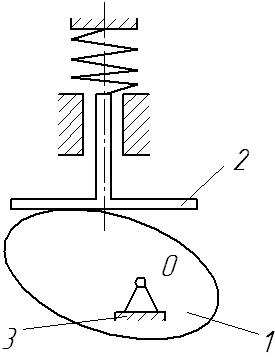
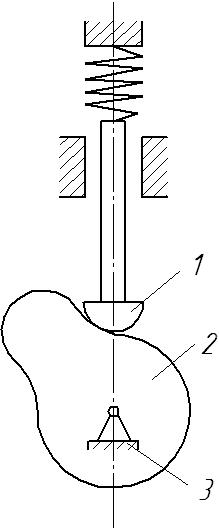
Рисунок 9.4 – Конструкции поступательно движущегося толкателя