1.2 Кинематические пары и их классификация
Кинематической парой (КП) называется подвижное непосредственное соединение двух звеньев. При соединении n звеньев образуется n-1 кинематических пар (сложный шарнир), например, в механизме, изображенном на рис. 1.2. (грохот конвейера, качающегося конвейера, уплотняющей машины) кинематических пар 7 (перечислим их: 6-1, 1-2, 2-3, 3-4, 3-6,4-5, 5-6), в шарнире С лишней является пара звеньев 2-4.
Рассмотрим цилиндрическую зубчатую передачу, условное изображение которой приведено на рисунке 1.3. Звенья 1 и 2 подвижны, звено 3- неподвижно (станина). Определим число кинематических пар, образуемых звеньями 1,2,3. Звено 1 со звеном 3 - первая кинематическая пара, звено 1 со звеном 2- вторая КП, звено 2 со звеном 3- третья КП. Зубчатое колесо 1 жестко закреплено на своем валу — колесо 1 и вал вместе с крепёжными деталями образуют одно звено. Аналогично колесо 2 с валом также образуют одно звено. Звено 1 со звеном 3 и звено 2 со звеном 3 соприкасаются по цилиндрическим поверхностям, а звено 1 со звеном 2- по линии.
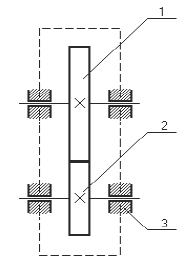
Рисунок 1.3 - Схема редуктора
Те поверхности, линии или точки, которыми звенья непосредственно соприкасаются друг с другом, называются элементами кинематических пар. Если звенья, образующие КП, в силу характера их соприкосновения, могут совершать только простейшие движения относительно друг друга (вращательное, прямолинейное поступательное или, в общем случае, винтовое), то пара является низшей. Более сложные относительные движения можно реализовать в парах, характер соприкосновения звеньев в которых допускает не только относительное скольжение, но и перекатывание. Такие пары называются высшими. Таким образом, по характеру касания звеньев кинематические пары делятся на высшие и низшие. Низшими КП называются такие пары, звенья которых соприкасаются по поверхностям. Высшими КП называются такие пары, звенья которых соприкасаются по линии или в точке. Механические передачи в структуре которых присутствуют высшие кинематические пары являются следующие механизмы с гибкими звеньями (цепные, ременные); фрикционные; зубчатые; кулачковые, поводковые механизмы (мальтийские) и др.
Примеры низших кинематических пар приведены на рисунках 1.4. и 1.5. На рисунке 3 показана вращательная кинематическая пара. Звено 1 может совершать вращательное движение по отношению к звену 2. Касание звеньев здесь происходит по цилиндрической поверхности. Ползун 1 движется в направляющей 2 (рис. 1.4.). Касание звеньев 1 и 2 происходит по плоскостям. Это поступательная кинематическая пара.
Примером высших кинематических пар могут быть цилиндр на плоскости — касание звеньев происходит по линии — образующей цилиндра (рис. 1.6.); и шар на плоскости — касание звеньев происходит в точке (рис. 1.7.).
По характеру относительного движения звеньев КП делятся на плоские и пространственные. Плоскими называются такие кинематические пары, относительное движение звеньев которых плоское.
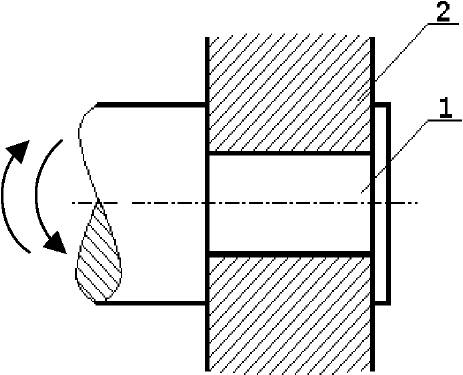
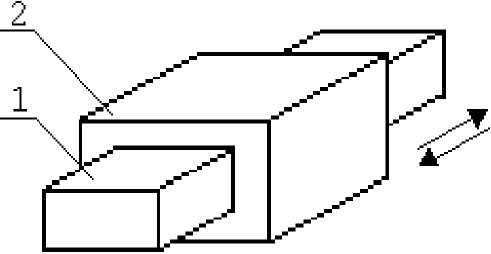
Рисунок 1.4 - Вращательная КП Рисунок 1.5 - Поступательная КП
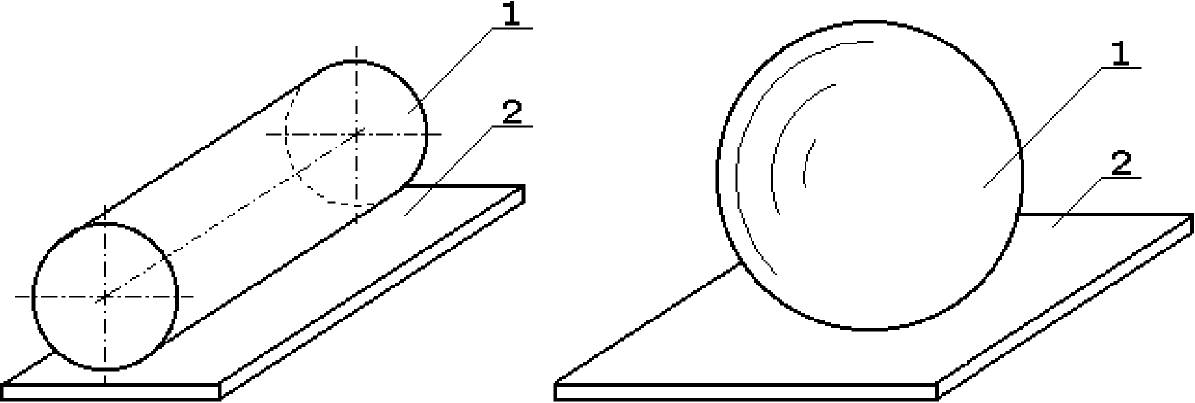
Рисунок 1.6 - Цилиндр на плоскости Рисунок 1.7 - Шар на плоскости
Напомним сведения, известные из механики материального тела: перемещающееся в плоскости (движущееся плоско) твердое тело, имеет 3 степени свободы (для определения положения тела необходимо определить три обобщённые координаты — перемещения вдоль осей x, y и угловая координата φ).
Относительное движение — движение одного звена при мысленно неподвижном втором. Плоским движением тела называется такое движение, при котором все точки тела движутся параллельно некоторой неподвижной плоскости - плоскости параллелизма. Плоские КП совершают, следующие виды относительного движения звеньев: плоско - параллельное - параллельно некоторой неподвижной плоскости; поступательное - любая прямая тела движется параллельно некоторой прямой на неподвижной плоскости; вращательное - вращение тела вокруг неподвижной оси. При изучении характера движения звеньев и вида кинематических пар особое внимание следует обратить на плоско - параллельное (сложное) движение: сочетание относительного с переносным, или поступательного с вращательным.
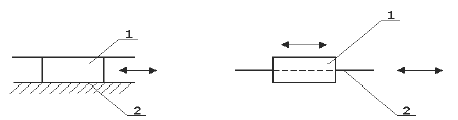
Рисунок 1.8 - Поступательная плоская КП
На рисунках 1.8-1.9 приведены примеры плоских кинематических пар. На рисунке 6 изображена плоская кинематическая пара при одном неподвижном звене 2, а на рисунке 7 — поступательная плоская пара с двумя подвижными звеньями. На рисунке 1.9. а) показана вращательная плоская кинематическая пара - шарнирное соединение двух звеньев (рычагов). Вращательной кинематической парой является также и колесо со станиной (рис. 1.9.б). На рисунке 1.9 в) показана плоско-параллельная КП (колесо-рельс). Качение окружности по прямой - плоско-параллельное движение.
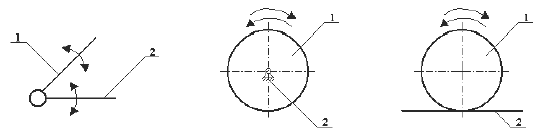
а) б) в)
Рисунок 1.9 - Плоская вращательная пара (а и б) и плоско-параллельная пара (в)
Кинематическая пара называется пространственной, если относительное движение её звеньев не плоское. Пространственный механизм образован подвижными звеньями, которые описывают траектории, лежащие в пересекающихся плоскостях. На рисунке 1.10. приведен пример пространственной кинематической пары — шаровой шарнир. Шар в шаровом гнезде может совершать вращение вокруг любой из трех осей x, y, z. На рисунке 1.11. показана также пространственная кинематическая пара - винтовая пара. Любая точка гайки при мысленно закреплённом винте совершает пространственное движение. Траектория любой точки гайки — винтовая линия.
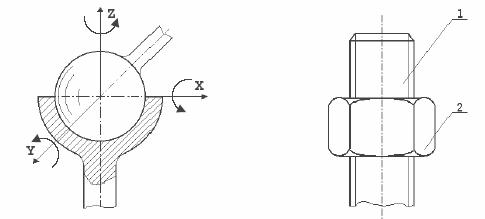
Рисунок 1.10 - Шаровой шарнир Рисунок. 1.11 - Винтовая пара
По характеру замыкания звеньев кинематические пары делятся на замкнутые геометрически и замкнутые не геометрически: силой или кинематической цепью. Соединение звеньев в кинематические пары может быть осуществлено по-разному. При геометрическом замыкании звенья конструктивно соединены в кинематические пары. В качестве примера можно рассмотреть колесо со станиной (рис. 1.9. б) или шарнирное соединение двух рычагов (рис. 1.9. а). При силовом замыкании кинематическая пара существует за счёт сил веса или сил пружин. Например, шар на плоскости (рис. 1.7.) или колесо рельс (рис. 1.9. в). При замыкании кинематической цепью пара существует за счёт других кинематических пар в кинематической цепи, которые не позволяют нарушить контакт звеньев, образующих кинематическую пару. Например, кинематическая пара, образованная зацеплением двух зубчатых колёс 1,2 (рис. 1.3.).
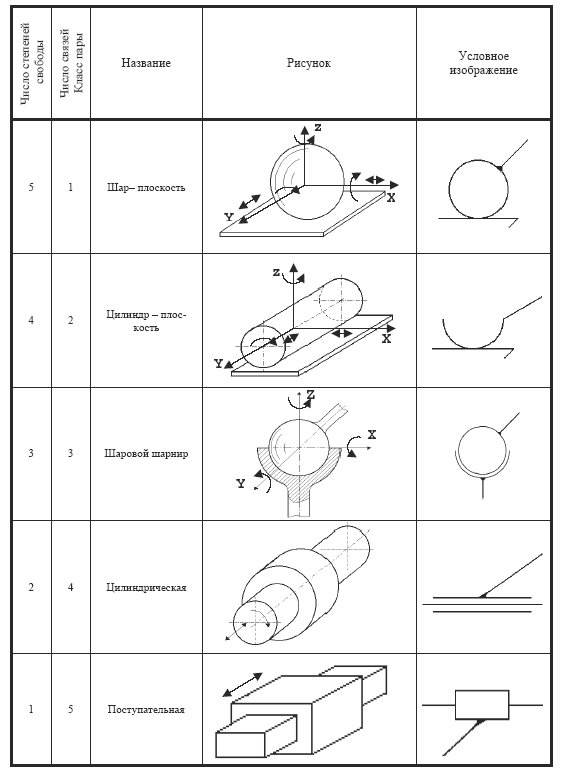
По числу потерянных степеней свободы Н в относительном движении или по числу условий связей S кинематические пары делятся на 5 классов (или по степеням подвижности — 1-но, 2-х, 3х, 4-х и 5-ти, т.е. Н-подвижные кинематические пары). Все перечисленные виды кинематических пар приведены на схеме (рис. 1.12.)
Класс пары — это число условий связей S, накладываемых парой на относительное движение звеньев, или число потерянных степеней свободы в относительном движении звеньев. Тело, свободно перемещающееся в пространстве, имеет 6 степеней свободы: движение вдоль осей x, y, z и вращение вокруг этих осей. Степень свободы — обобщённая координата — это число независимых параметров, которыми определяется положение тела в пространстве или его движение. Соединяя звенья в кинематические пары, мы тем самым лишаем их одной или нескольких степеней свободы. При соединении звеньев в кинематические пары теряются 1 или 2 степени свободы. Поэтому плоские кинематические пары могут быть только 2-х классов: 1-го и 2-го.
Пример поступательной плоской кинематической пары показан на рисунке 1.8. Пары низшие 2 класса (одноподвижные) - кинематической пары, в которых потеряно 2 степени подвижности. Пример вращательной плоской пары 2 класса показан на рисунке 1.9. а. Примером высшей плоской кинематической пары 1 класса (2-хподвижной) является зацепление профилей зубьев эвольвентных колёс. В этой паре потеряна одна степень подвижности — перемещение вдоль оси x. Возможно перекатывание профилей вокруг точки контакта и смещение вдоль оси y.
В зависимости от числа потерянных степеней свободы в относительном движении звеньев, связанных в кинематические пары, пространственные пары делятся на 5 классов. Для иллюстрации классификации кинематических пар составим таблицу, включающую примеры всех 5 классов пространственных пар (табл. 1.1.).
Для определения
класса кинематической пары необходимо
подсчитать число простейших движений,
которыми обладает звено кинематической
пары в относительном движении; вычесть
полученное число из шести, получив при
этом число связей, налагаемых данной
кинематической парой на относительное
движение её звеньев, и этим определим
класс пары. Таким образом, степень
свободы с условием связи связана
следующим образом
![]() .
.
По характеру повторяемости траекторий точек элементов кинематических пар пары делятся на обратимые и необратимые.
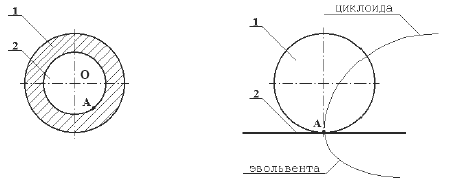
Рисунок. 1.13. Обратимая пара Рисунок. 1.14. Необратимая пара
Обратимыми называются такие кинематические пары, траектории точек элементов кинематических пар которых повторяются. Например, во вращательной паре (рисунок. 1.13) при движении звена 1 по отношению к звену 2 траектория точки А, лежащей на поверхности соприкосновения звеньев и принадлежащей звену 1, — окружность. При мысленно закрепленном звене 1 траектория точки А, принадлежащей звену 2, в относительном движении, также окружность радиуса ОА.
Необратимыми называются такие кинематические пары, траектории точек элементов которых в относительном движении не повторяются. Примером является плоская кинематическая пара колесо - рельс. При перекатывании колеса по направляющей точка А (рис. 1.14) описывает циклоиду, а при перекатывании прямой по окружности - эвольвенту.
Таблица 1.1 - Примеры кинематических пар