

2.4 Определение коэффициента изменения скорости хода
Найдем крайние положения кулисного механизма, изображенного на рисунке (2.9). Для этого радиусом АB описываем траекторию движения точки В. Из точки D проводим касательные к этой окружности. Из точки A проводим линии, перпендикулярные к касательным. Получаем точки: B0 – для крайнего правого положения кулисы CD , BK – для крайнего левого положения. Радиусом CD проводим траекторию точки С и находим крайние положения точки С – C0 и CK.
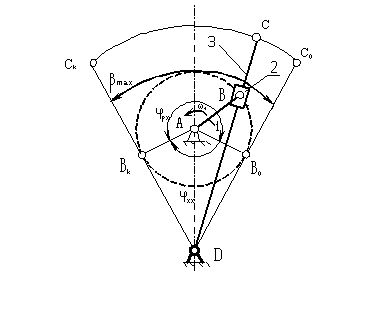
Рисунок 2.9 – Кулисный механизм
Обозначим βmax – угол между двумя крайними положениями кулисы – максимальный угол качания кулисы. Пусть угловая скорость кривошипа ω1 = const. При движении кулисы от C0 до CK кривошип повернется на угол φpx – угол рабочего хода. При движении коромысла от CK до C0, кривошип повернется на меньший угол - φxx - угол холостого хода.
Поскольку ω1 = const, то очевидно, что ωср.3 при φpx меньше, чем при φxx. Обычно в машинах (станках) задаются коэффициентом изменения скорости хода КV:
ωcр.
хх
ωср.
рх
KV = . (2.27)
Определим время холостого и рабочего хода:
tpx
=![]() ;
txx
=
;
txx
=
![]() . (2.28)
. (2.28)
Средние угловые скорости кулисы:
βmax
tpx
βmax
txx
ω3 cр.pх= ; ω3 cр.xх = .
Определяем коэффициент изменения скорости хода:
 .
(2.29)
.
(2.29)
Подставим вместо tpx и txx их значения:
 .
.
Обычно коэффициент изменения скорости хода принимается по практическим соображениям в пределах 1,5 – 2,0.
Таким образом, уже на стадии проектирования кулисного механизма можно заранее определить соотношение размеров звеньев кулисного механизма для обеспечения заданной производительности машины, например, станка.
3 Силовой анализ механизмов
3.1 Общие положения
Целью силового расчета механизма является определение реакций в кинематических парах и уравновешивающей силы (уравновешивающего момента сил).
Проектирование механизма преполагает расчет его звеньев и кинематических пар на прочность и жесткость, а это требует знания сил, действующих на звенья, в том числе усилий взаимодействия звеньев в кинематических парах. Эти усилия в дальнейшем будем называть реакциями в кинематических парах и обозначать Rm,p,
где m – обозначение звена, на которое действует реакция R,
p – обозначение звена, со стороны которого действует реакция R.
Для осуществления прочностного расчета звеньев механизма, а также проектирования его привода необходимо также знать уравновешивающую силу Fy или уравновешивающий момент My, который нужно приложить к ведущему звену для обеспечения движения механизма по требуемому закону.
В дальнейшем в некоторых случаях термины «сила» и «момент сил» будем объединять термином «нагрузка».
Удобно определять упомянутые нагрузки из уравнений равновесия. Однако в большинстве случаев объект приложения нагрузок (точка, звено, группа звеньев, механизм) не находится в состоянии равновесия. В таких случаях можно воспользоваться принципом Даламбера: если в систему нагрузок, действующих на объект, включить силы инерции его элементов, то этот объект можно рассматривать как находящийся в равновесии.