

9.2.3 Угол давления и угол передачи движения в кулачковом механизме
При проектировании кулачкового механизма помимо требуемого закона движения толкателя необходимо удовлетворить также динамические требования, т.е. обеспечить благоприятные условия силового взаимодействия кулачка и толкателя (с возможно меньшими потерями на трение, износ профилей).
Рассмотрим процесс силового взаимодействия вращающегося кулачка и поступательно движущегося толкателя (рис.9.7а). Если кулачок вращается с угловой скоростью ωк по направлению хода часовой стрелки, то в изображенном положении толкатель движется вверх — удаляется от центра кулачка. Скорость движения толкателя обозначим Vв2. При передаче движения от кулачка толкателю со стороны кулачка на толкатель действует усилие Р нормального давления, которое, если не учитывать трение, направлено по нормали к профилю кулачка. Через точку контакта кулачка и толкателя проведем касательную τ-τ нормаль n-n. Сила нормального давления приложена в точке контакта по нормали, а следовательно, проходит через центр ролика В. Разложим силу нормального давления на 2 составляющие: Р1 - направленную по скорости перемещения толкателя и Р2 - перпендикулярную перемещению толкателя. Составляющая Р1 осуществляет подъем толкателя - выполняет полезную работу. Составляющая Р2 -нагружает опоры толкателя, стремится перекосить толкатель в направляющих и при неблагоприятных условиях может вызвать заклинивание толкателя в направляющих. Это может произойти в том случае, когда сила трения в направляющих, вызванная составляющей Р2 нормального давления, превысит полезную составляющую Р1, т.е. когда угол (α) между силой нормального давления Р и ее составляющей Р1 будет довольно большой . Этот угол называется углом давления.
Углом давления (α) в кулачковом механизме называется угол между нормалью к профилю кулачка (направлением силы нормального давления), проведенной через точку контакта кулачка и толкателя, и вектором абсолютной скорости конца толкателя.
Для уменьшения составляющей силы нормального давления Р2 угол давления α целесообразно уменьшать.
Углом передачи движения (γ) называется нетупой угол между касательной к профилю кулачка, проведенной через точку контакта кулачка и толкателя, и вектором абсолютной скорости конца толкателя.
Как видно по рис.9.7, угол передачи движения γ дополняет угол давления α до 90°, т.е.
α +γ=90°.
Угол передачи движения целесообразно увеличивать.
В зависимости от положения точки контакта на профиле кулачка меняется угол между направлением абсолютной скорости конца толкателя и касательной и нормалью к профилю кулачка, проведённой через точку контакта, т.е. меняется соотношение между углами α и γ.
Для нормального силового взаимодействия звеньев кулачкового механизма угол давления по всему профилю кулачка не должен превышать некоторого значения α mах, которое обусловлено конструкцией и требованиями к конкретному кулачковому механизму. Поскольку угол передачи движения является углом, дополняющим угол давления до 90°, то он всегда острый. При этом вместо значения α mах может быть задано значение γmin, т.е. значение угла передачи движения γ не должны быть меньше некоторого заданного по условиям нормального силового (динамического) взаимодействия звеньев кулачкового механизма минимального значения по всему профилю кулачка
α < α mах, γ>γmin
Из опыта проектирования и эксплуатации кулачковых механизмов можно принять αmaх=30° и γmin=600 для схемы с поступательно движущимся толкателем. Если механизм силовой, т.е. передает значительные мощности, то принимают αmах =15-ч200. Следует указать, что угол давления принимается не только исходя из условия незаклинивания толкателя, но и по ряду других конструктивных и экономических соображений.
Рассмотрим работу кулачкового механизма с вращающимся кулачком и толкателем, совершающим возвратно-вращательное движение (рис.9.7б). Пусть кулачок вращается с угловой скоростью ωк, направленной по ходу часовой стрелки. Проведем касательную τ-τ и нормаль n-n к профилю кулачка через точку контакта толкателя и кулачка. В процессе передачи движения от кулачка толкателю на последний действует сила нормального давления Р, направленная по нормали. Вектор абсолютной скорости конца толкателя Vв2 направлен по касательной к траектории конца толкателя (центра ролика), и, следовательно, перпендикулярно толкателю АВ. Разложим силу нормального давления Р на 2 составляющие: Р1 - направленную по скорости конца толкателя Vв2 и Р2, направленную перпендикулярно вектору скорости (вдоль АВ). Составляющая Р1 поворачивает толкатель вокруг А. Это полезная составляющая нормального давления. Ее целесообразно увеличивать. Составляющая Р2 нагружает опору А, стержень АB осевой нагрузкой. При больших значениях силы Р2 возможно заклинивание кулачкового механизма, т.к. составляющая Р2 увеличивает потери на трение в опоре. Поэтому при проектировании целесообразно принимать величину угла давления не более 45° (αmax= 45°).
9.3. Проектирование кулачковых механизмов
9.3.1 Выбор и определение законов движения толкателя
9.3.1.1 Основные критерии выбора
В практике исследования кулачковых механизмов чаще приходится решать задачу синтеза кулачковых механизмов, т.е. по заданному закону движения толкателя проектировать профиль кулачка.
Синтез кулачкового механизма условно можно разделить на 3 этапа:
Выбор и определение законов движения толкателя.
Определение минимального радиуса теоретического (центрового) профиля кулачка исходя из условия незаклинивания (α≤α мах или γ ≥ γmin) (динамический синтез).
Построение теоретического и действительного профилей кулачка.
а) б)
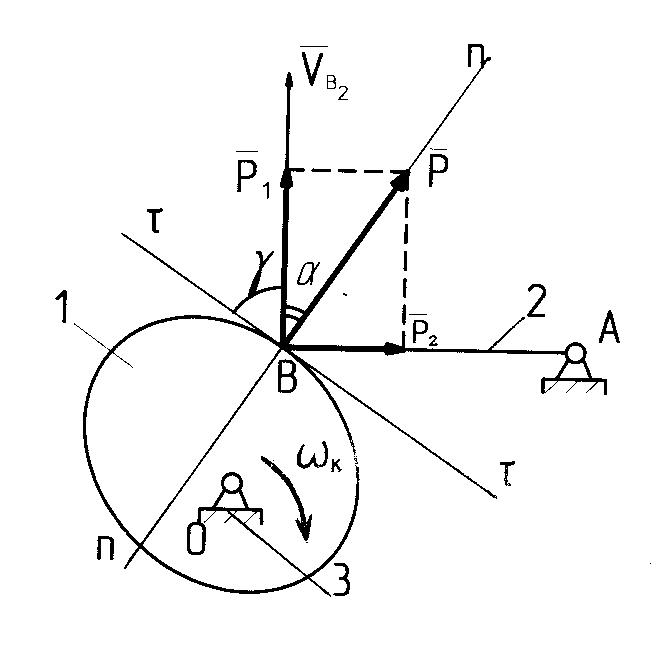
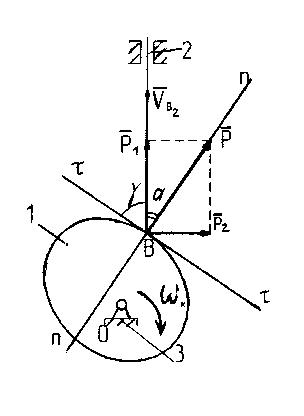
Рисунок 9.7 – К определению углов давления и передачи движения
В зависимости от технологических операций, выполняемых машиной, конструктор задает или определяет закон движения толкателя. При этом закон движения толкателя может быть задан в виде графика, изображающего зависимость движения кулачка и толкателя в течение полного цикла, в виде таблиц, отображающих ряд положений толкателя и кулачка, или в виде аналитической зависимости Sт=f1(t) или Sт=f2(φ) (βт=f1(t) или βт=f2(φ)) .
Если закон движения толкателя задан в виде графика и нет возможности преобразовать его в аналитическую форму, применяется графическое дифференцирование для определения параметров движения толкателя: определяется скорость и ускорение толкателя по графическому изображению этих зависимостей в каждый отрезок времени. При этом график движения толкателя по оси абсцисс (φ или t) делится на n равных частей, достаточных для построения профилей кулачка.
При табличной форме задания закона движения толкателя и невозможности выразить его в аналитическом виде, поступают так же, как и в предыдущем случае, построив графическое изображение закона движения толкателя.
Следует указать, что как в первом, так и во втором случаях можно применить машинную обработку данных и с достаточной для практических целей точностью аппроксимировать графические и табличные зависимости аналитическими и выполнить также с помощью ЭВМ их дифференцирование.
При выборе законов движения толкателя необходимо руководствоваться следующими соображениями:
Следует избегать законов движения толкателя, имеющих жесткие удары. Жёсткий удар – это явление, при котором скорость толкателя мгновенно изменяется на конечную величину, т.е. в данный момент времени имеем скачок на графике скорости [1,2]. Мгновенное изменение скорости на конечную величину приводит к появлению значения ускорения, равному бесконечности (рис.9.8), вследствие чего в системе возникают динамические усилия, равные бесконечности (F=m•a). Практически за счет наличия упругости деталей механизма такие усилия возникнуть не могут, т.к. ускорение при наличии упругих связей в механизме принимают конечные значения. Однако это явление может привести к перегрузкам деталей и вызвать их поломку.
Желательно применять законы движения толкателя, не имеющие и мягких ударов. Мягкий удар - это явление, при котором ускорение толкателя имеет мгновенное изменение на конечную величину (скачок) (рис.9.9). При этом жесткие удары будут отсутствовать, однако динамические нагрузки в системе значительны. Мягкие удары также приводят к повышенному износу деталей механизма и преждевременному выходу их из строя.
При синусоидальном законе изменения ускорения толкателя (рис.9.10) отсутствуют как жесткие, так и мягкие удары .
3. Сравнивая законы движения толкателя, следует отдавать предпочтение тем, у которых максимальные значения ускорения и скорости толкателя будут наименьшими. Такие законы движения толкателя будут вызывать меньшие значения динамических усилий и меньший износ деталей механизма.
Как следует из рекомендаций по выбору закона движения толкателя целесообразно задаваться законом изменения ускорения толкателя во избежание жестких и мягких ударов в механизме. Обычно законы изменения скорости и ускорения толкателя задаются в форме аналогов, т.е. в такой форме которой параметры движения толкателя и кулачка взаимно увязаны между собой.
1. Рассмотрим кулачковый механизм с вращающимся кулачком и поступательно движущимся толкателем.
Законом изменения перемещения толкателя в этом случае является функция Sт(φ), где SТ - перемещение толкателя, φ - угол поворота кулачка. Если угловая скорость кулачка постоянная ω=const, то угол поворота в любой момент времени можно определить по формуле:
φ =ω•t.
О пределим
скорость перемещения толкателя как
производную от его перемещения
пределим
скорость перемещения толкателя как
производную от его перемещения
(9.1)
Разделим и умножим левую часть уравнения (9.1) на бесконечно малую величину dφ
![]()
В полученном уравнении - угловая скорость кулачка. Тогда
 (9.2)
(9.2)
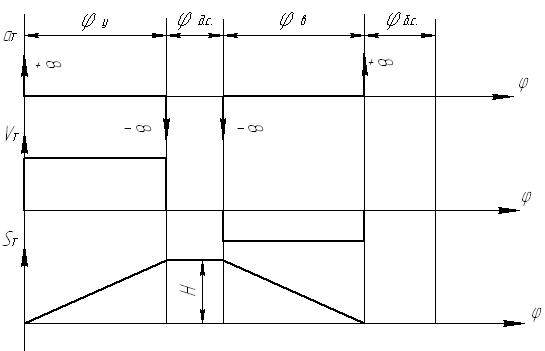
Рисунок 9.8 – Явление жёсткого удара
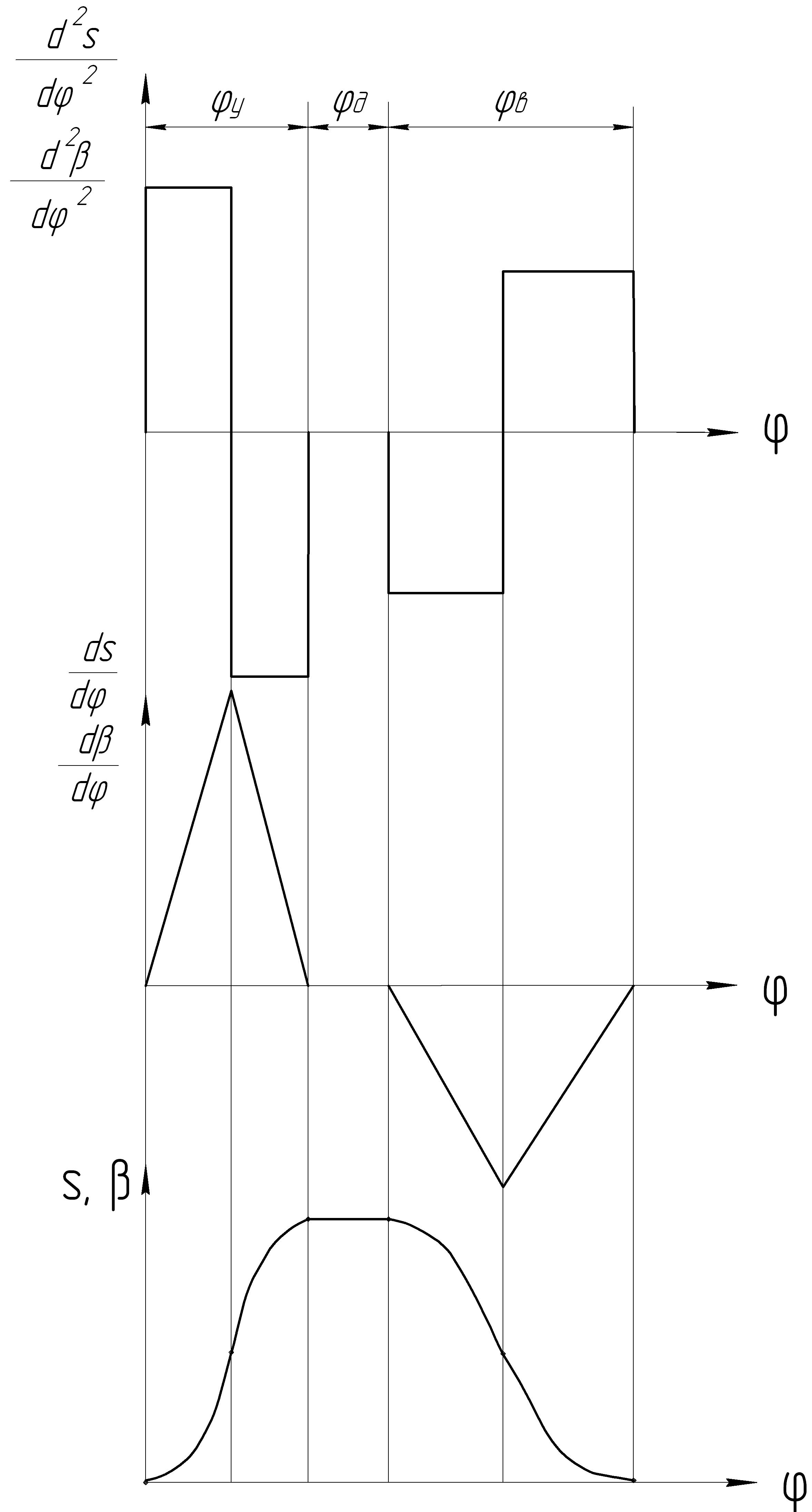
Рисунок 9.9 – Явление мягкого удара
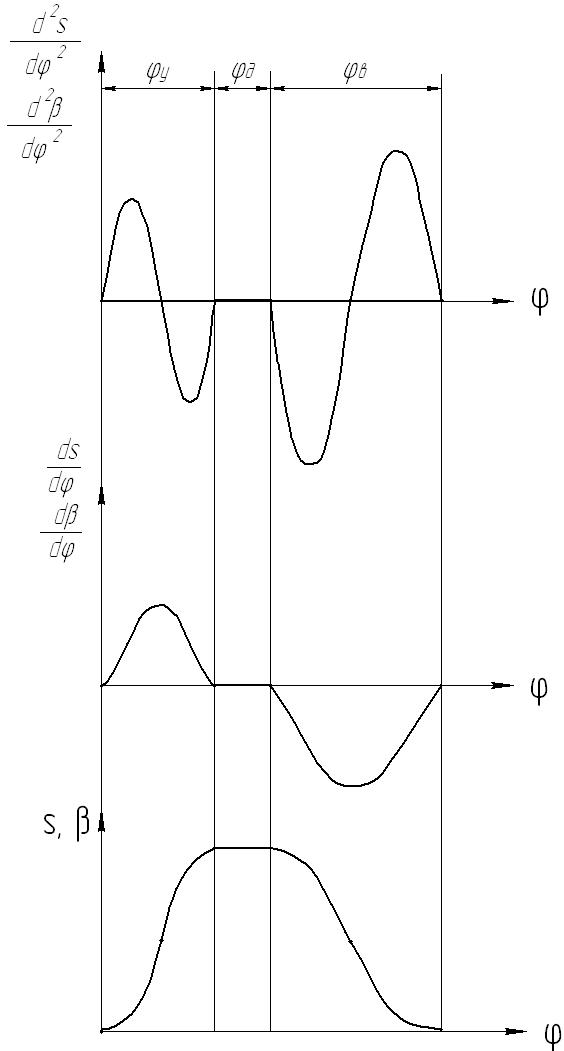
Рисунок 9.10 – Безударный закон движения толкателя
Выражение
![]() получило название аналога скорости
толкателя, т.к. при ω=const
φ=ωt.
Следовательно, перемещение толкателя
как функция времени и как функция угла
поворота идентичны. Определим ускорение
толкателя как производную скорости
толкателя по времени
получило название аналога скорости
толкателя, т.к. при ω=const
φ=ωt.
Следовательно, перемещение толкателя
как функция времени и как функция угла
поворота идентичны. Определим ускорение
толкателя как производную скорости
толкателя по времени
αT=![]() .
(9.3)
.
(9.3)
Подставим в (9.3) значение скорости (9.2), полученное ранее:
αT= .
.
Если
![]() ,
то
,
то
![]() =
= ,
,
где
![]() - угловая скорость кулачка.
- угловая скорость кулачка.
В окончательном виде
αT=![]() (9.4)
(9.4)
В этой
функции выражение
![]() получило название аналога ускорения,
т.к. при ω=const
ускорение толкателя как функция времени
получило название аналога ускорения,
т.к. при ω=const
ускорение толкателя как функция времени
![]() и аналог ускорения толкателя как
функция угла поворота кулачка
идентичны.
и аналог ускорения толкателя как
функция угла поворота кулачка
идентичны.
2. Рассмотрим кулачковый механизм с вращающимся кулачком и вращающимся толкателем.
Законом движения толкателя в этом случае называется зависимость угла поворота толкателя β от угла поворота кулачка φ: β=f(φ).
Угол
поворота кулачка определяется по
формуле:
![]() ,
если угловая скорость
,
если угловая скорость
кулачка ω=const.
Определяем угловую скорость толкателя
![]() T=
T=![]() ,
,
T=![]() .
(9.5)
.
(9.5)
Здесь
![]() - аналог угловой скорости толкателя.
- аналог угловой скорости толкателя.
Определяем угловое ускорение толкателя
 ,
(9.6)
,
(9.6)
Здесь
![]() - аналог углового ускорения толкателя.
- аналог углового ускорения толкателя.
Имея законы изменения аналогов угловых ускорений или аналогов линейных ускорений толкателей посредством интегрирования, определяются законы изменения угловых скоростей или линейных скоростей толкателей. Затем посредством повторного интегрирования определяют законы движения толкателей S(φ) или β(φ).