

9.4 Определение минимального радиуса теоретического профиля кулачка. (Динамический синтез)
При рассмотрении углов давления α и углов передачи движения γ в кулачковых механизмах мы определили, что соотношение углов α и γ меняется по профилю кулачка (изменяется направление касательной в каждой точке профиля кулачка). При проектировании кулачкового механизма необходимо, чтобы угол давления не превышал некоторый заданный по условию не заклинивания или другим условиям угол давления α max
![]() или
или
![]() .
.
Как видно из построения (рис.9.11), чем больше радиус кривизны кулачка в точке касания профиля кулачка с толкателем, тем меньше угол давления.
При конструировании кулачковых механизмов стремятся к уменьшению габаритов кулачка и всего механизма в целом. Поэтому стремятся получить минимальные радиусы кривизны профиля кулачка. Это улучшает весогабаритные показатели механизма и его динамические свойства. Очевидно, для каждого кулачкового механизма можно определить минимальный радиус профиля r0, при котором еще будет удовлетворяться условие α≤α max . Все другие радиусы профиля кулачка меньшие этого минимального не будут удовлетворять условию α≤ α max.
Рассмотрим выбор минимального радиуса кулачка для механизма с вращающимся кулачком и поступательно движущимся толкателем (рис.9.11).
Скорость
точки В конца толкателя (![]() )
представим как векторную сумму 2-х
скоростей - переносную и относительную.
Движение толкателя рассматриваем как
переносное - вместе с кулачком и
относительное - скольжение по профилю
кулачка. Тогда абсолютная скорость
конца толкателя будет представлена
векторным уравнением:
)
представим как векторную сумму 2-х
скоростей - переносную и относительную.
Движение толкателя рассматриваем как
переносное - вместе с кулачком и
относительное - скольжение по профилю
кулачка. Тогда абсолютная скорость
конца толкателя будет представлена
векторным уравнением:
![]()
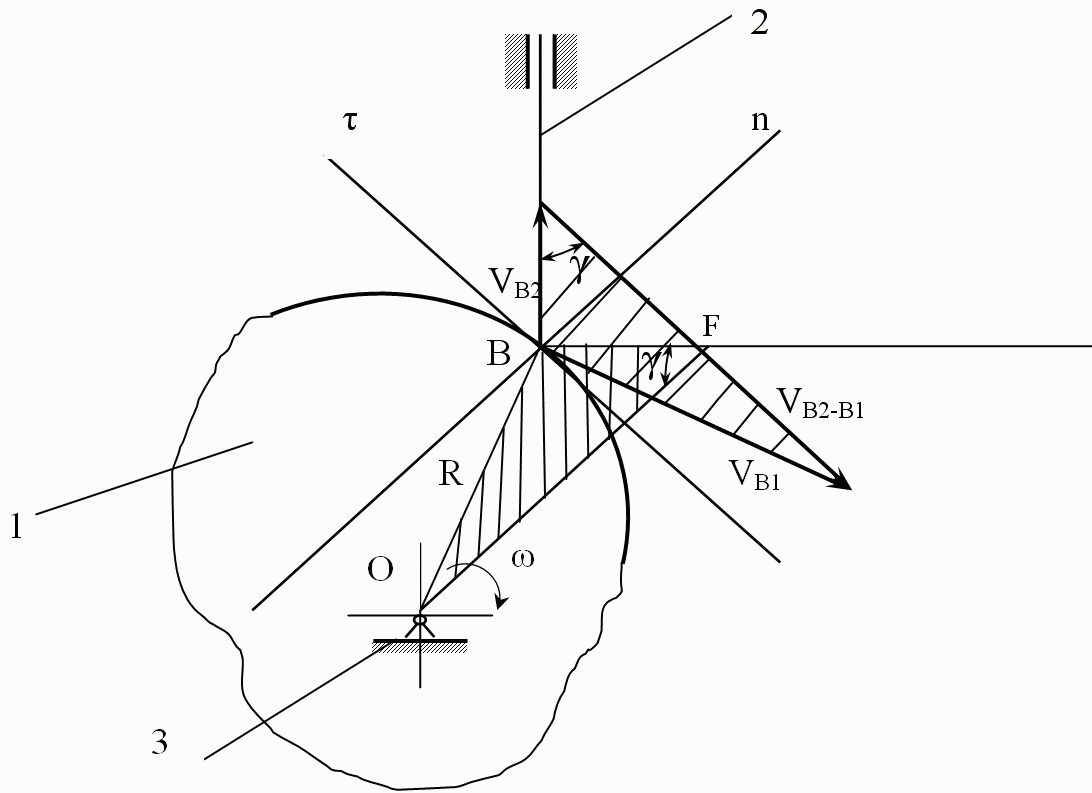
Рисунок 9.11 – К выбору rо теоретического профиля кулачка
Вектор
скорости точки В2
толкателя
![]() направлен по оси толкателя в сторону
перемещения толкателя.
направлен по оси толкателя в сторону
перемещения толкателя.
Вектор
переносной скорости
![]() точки
В кулачка направлен перпендикулярно
радиусу вращения ОВ в сторону угловой
скорости кулачка ω и по модулю равен
точки
В кулачка направлен перпендикулярно
радиусу вращения ОВ в сторону угловой
скорости кулачка ω и по модулю равен
![]() .
.
Вектор
относительной скорости
![]() направлен по касательной к траектории
точки В в относительном движении точки
- скольжении по профилю кулачка, а,
следовательно, по касательной τ-τ к
профилю кулачка через точку контакта
В. Решив векторное уравнение, определим
все скорости по модулю и направлению
их векторов.
направлен по касательной к траектории
точки В в относительном движении точки
- скольжении по профилю кулачка, а,
следовательно, по касательной τ-τ к
профилю кулачка через точку контакта
В. Решив векторное уравнение, определим
все скорости по модулю и направлению
их векторов.
Обозначим угол между направлением вектора абсолютной скорости точки В толкателя и касательной τ-τ – γ угол передачи движения в точке В профиля кулачка.
Выполним
дополнительные построения. Из точки В
в сторону вращения кулачка проведем
перпендикуляр к скорости толкателя
VВ![]() ,
а из точки О — центра вращения кулачка
проведем перпендикуляр к касательной
τ-τ до пересечения с предыдущим
перпендикуляром. Точку пересечения
обозначим F.
Рассмотрим треугольник скоростей и
треугольник ОBF.
Они подобны, т.к. их стороны взаимно
перпендикулярны
,
а из точки О — центра вращения кулачка
проведем перпендикуляр к касательной
τ-τ до пересечения с предыдущим
перпендикуляром. Точку пересечения
обозначим F.
Рассмотрим треугольник скоростей и
треугольник ОBF.
Они подобны, т.к. их стороны взаимно
перпендикулярны
![]() ,
,
![]() ,
,
![]() .
Отрезок FB
обозначим Z. Составим отношение:
.
Отрезок FB
обозначим Z. Составим отношение:
![]() ;
откуда
;
откуда
 ,
здесь
,
здесь
![]() ,
,
![]() ; заменим
; заменим
![]() ;
;
![]() ,
,
тогда
![]() (аналог
линейной скорости толкателя).
(аналог
линейной скорости толкателя).
![]() (9.15)
(9.15)
Следовательно, отрезок Z равен аналогу линейной скорости толкателя . Угол BFO равен углу передачи движения γ (их стороны взаимно перпендикулярны)
![]()
Из рисунка видно, что при увеличении отрезка ОB и неизменном Z угол γ будет увеличиваться и при уменьшении ОB — уменьшаться. Отрезок ОB — радиус кулачка в данной точке профиля кулачка B. Таким образом, при заданном γmin можно определить r0, имея аналог скорости толкателя .
Отметим,
что положение точки F
(слева или справа от линии толкателя)
определяется вектором
![]() ,
если его повернуть на прямой угол в
направлении вращения кулачка.
,
если его повернуть на прямой угол в
направлении вращения кулачка.
Приходим к следующему положению: если рассчитать отрезок Z= и отложить его на перпендикуляре к скорости конца толкателя в определенном направлении (VB2 необходимо повернуть на 900 по направлению вращения кулачка), конец отрезка соединить с центром кулачка, то угол между проведенным лучом и отрезком Z окажется равным углу передачи движения γ.
Если отрезки Z рассчитаны для нескольких положений толкателя на фазе удаления и фазе возвращения, то найти минимальный радиус профиля кулачка можно следующим образом.
С
учетом масштабного коэффициента μℓ
изображается максимальное перемещение
толкателя и на нем откладываются отрезки,
изображающие перемещение толкателя в
рассчитанном i-том положении (рис.9.12).
По имеющимся значениям перемещения
толкателя S(φ)
и аналога скорости толкателя
![]() строится кривая
строится кривая
![]() .
Для этого через полученные точки i-го
перемещения толкателя, проводятся
прямые, перпендикулярные траектории
конца толкателя, на которых откладываются
отрезки Z с учетом масштабного
коэффициента μ1
.
Для этого через полученные точки i-го
перемещения толкателя, проводятся
прямые, перпендикулярные траектории
конца толкателя, на которых откладываются
отрезки Z с учетом масштабного
коэффициента μ1
 .
При этом положительные значения
совпадают с направлением положительной
скорости толкателя VB2,
повернутой на 900
в сторону вращения кулачка. Точки Мi
соединяются плавной кривой по лекалу.
.
При этом положительные значения
совпадают с направлением положительной
скорости толкателя VB2,
повернутой на 900
в сторону вращения кулачка. Точки Мi
соединяются плавной кривой по лекалу.
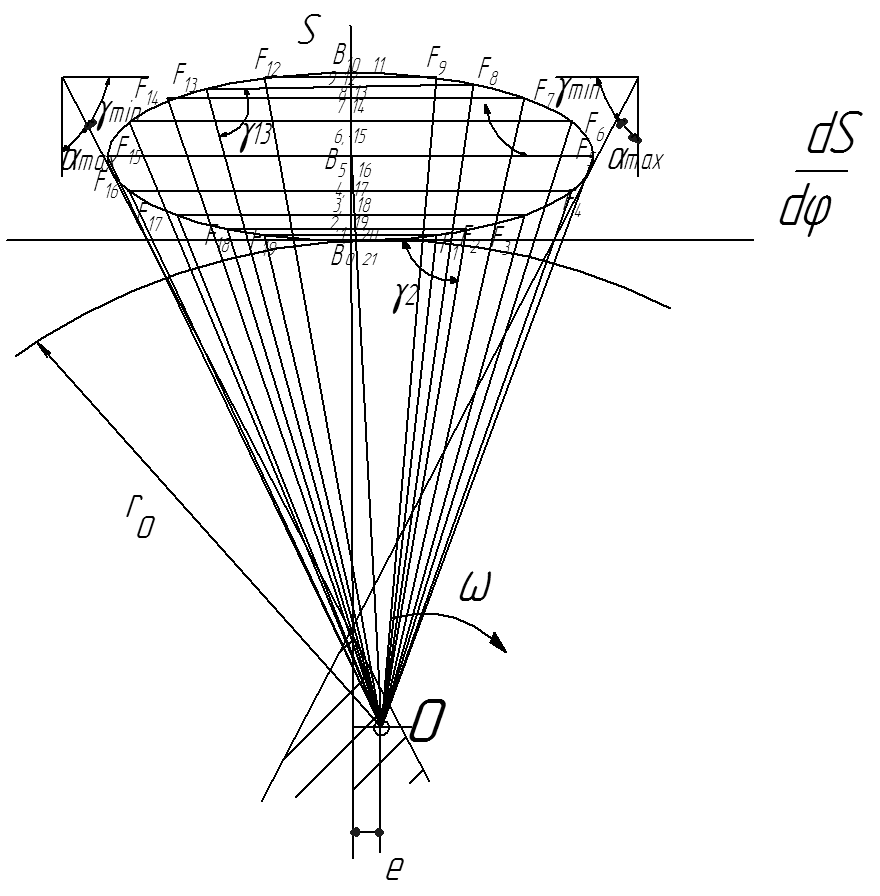
Рисунок 9.12 – К выбору ro для кулачка с геометрическим замыканием
Под углом γmin горизонтальной оси или αmax к вертикальной оси проводятся две касательные к построенной кривой. Пересекаясь, эти касательные ограничивают часть плоскости (между касательными за точкой их пересечения). Любая точка, лежащая в этой области может служить центром вращения кулачка, так как тогда в любом положении кулачкового механизма действительный угол передачи движения γ окажется меньше γmin.
Если механизм нецентральный (имеет эксцентриситет), тогда от линии движения толкателя с учетом μ1 откладывается эксцентриситет e и проводится прямая, параллельная траектории толкателя. На этой прямой в разрешенной области выбирается центр вращения кулачка О. Отрезок ОВo изображает минимальный радиус центрового профиля кулачка r0. Если е=0, то точка о берется на линии S в разрешенной зоне.
Затем
выбранный центр О соединяется с точками
F![]() и измеряются острые углы
и измеряются острые углы
![]() действительные углы передачи движения.
Для соответствующих расчетных положений
кулачкового механизма строится график
γ(φ).
действительные углы передачи движения.
Для соответствующих расчетных положений
кулачкового механизма строится график
γ(φ).
Если кулачковый механизм с силовым замыканием, то зависимость = f(S) строится только для фазы удаления.
Один ограничивающий луч под углом γmin к горизонтали проводится как касательная к построенной кривой, другой — из точки Во к горизонтали (рис.9.13) .
Рассмотрим порядок определения минимального радиуса вращающегося кулачка в механизме с вращающимся толкателем.
Построим механизм в произвольном положении (рис.9.13). Произведем построение, аналогичное тому, которое мы выполнили при определении Z в механизме с поступательно движущимся толкателем.
![]() .
.
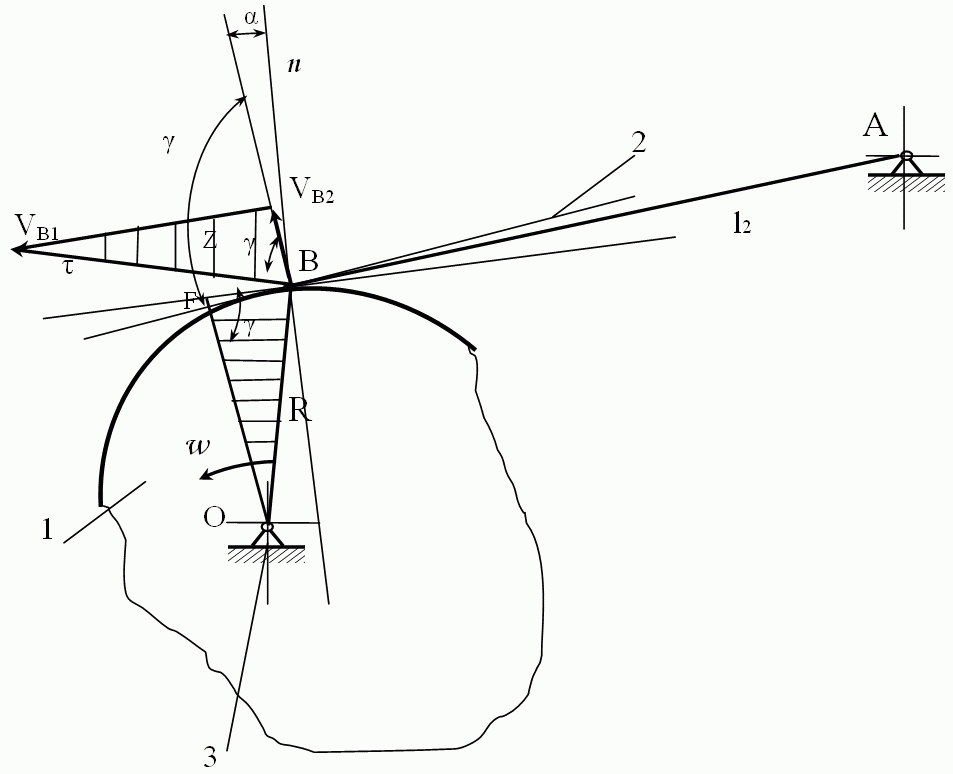
Рисунок 9.13 - Определение минимального радиуса вращающегося кулачка
в механизме с вращающимся толкателем
Скорость
конца толкателя разложим на 2 скорости:
переносную - скорость кулачка
![]() ,
и относительную - скорость перемещения
конца толкателя по профилю кулачка.
,
и относительную - скорость перемещения
конца толкателя по профилю кулачка.
Проведем линию перпендикулярную скорости толкателя в точке В и через O перпендикулярно ττ до пересечения с предыдущей линией. Точку их пересечения обозначим F. Получим треугольник ОBF подобный треугольнику скоростей. Угол BОF равен углу γ вследствие перпендикулярности сторон.
 ;
;
 ;
;
 ;
;
![]() ;
;
![]() , откуда
, откуда
![]() .
.
Таким образом, приходим к следующему выводу: если рассчитать отрезок Z и отложить его по перпендикуляру к скорости конца толкателя в сторону вращения кулачка (по повернутому на 90о вектору скорости толкателя), то, соединив конец отрезка Z с центром кулачка, получим угол передачи движения между отрезком Z и лучом, соединяющим конец отрезка Z с центром кулачка.
Выбор
минимального радиуса центрового профиля
кулачка, исходя из динамического условия
γi>γmin,
можно выполнить следующим образом.
Изображается толкатель в начальном
положении АВo
с учетом масштабного коэффициента длины
μ1.
Проводится дуга окружности АВo,
и откладывается угол βmax
(рис.9.14). На дуге намечаются точки B1,
B2,
B3
…
Bn
таким образом, чтобы угол BoАBi=
βi.
Значения углов поворота толкателя βi
найдены ранее, при определении законов
движения толкателя. Точки соединяются
с центром вращения кулачка В. Далее во
всех указанных положениях толкателя
вдоль линии толкателя в определенном
направлении (которое определяется
поворотом вектора скорости конца
толкателя на 90o
в сторону вращения кулачка) от точки
Bi;
откладываются подсчитанные отрезки
BiFi(Z)
с учетом масштабного коэффициента μl
![]() .Точки
Fi
соединяют плавной кривой .
.Точки
Fi
соединяют плавной кривой .
Через каждую точку Fi под углом γmin к соответствующему положению толкателя проводят прямые, которые, пересекаясь, образуют область возможного расположения центра вращения кулачка. Выбранная точка O соединяется с центром вращения толкателя A. Размер ОA изображает межосевое расстояние lOA. Отрезок ОBo, является изображением минимального радиуса теоретического профиля кулачка.
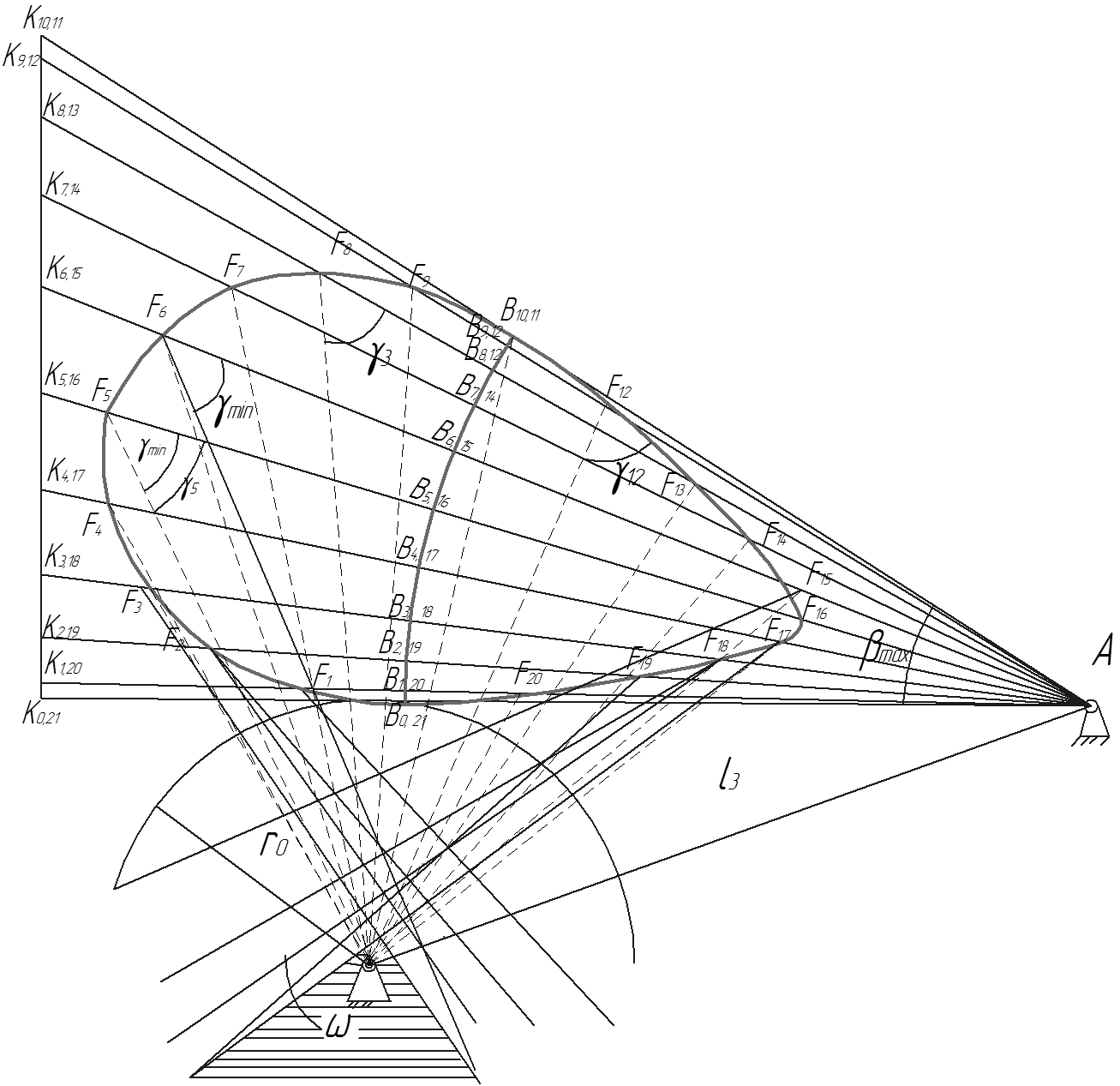
Рис.9.14 – К выбору ro теоретического профиля вращающегося кулачка с
вращающимся толкателем
Если механизм с силовым замыканием (рис.9.15), то возвращение толкателя происходит под действием силы упругости пружины. В таком случае проводится построение только на этапе удаления. Кроме лучей из каждой точки Fi под углом γmin проводится луч из точки Ао под углом γmin и определяется область возможного положения центра кулачка О. Для более точного построения углов βi пользуются значениями их тангенсов.
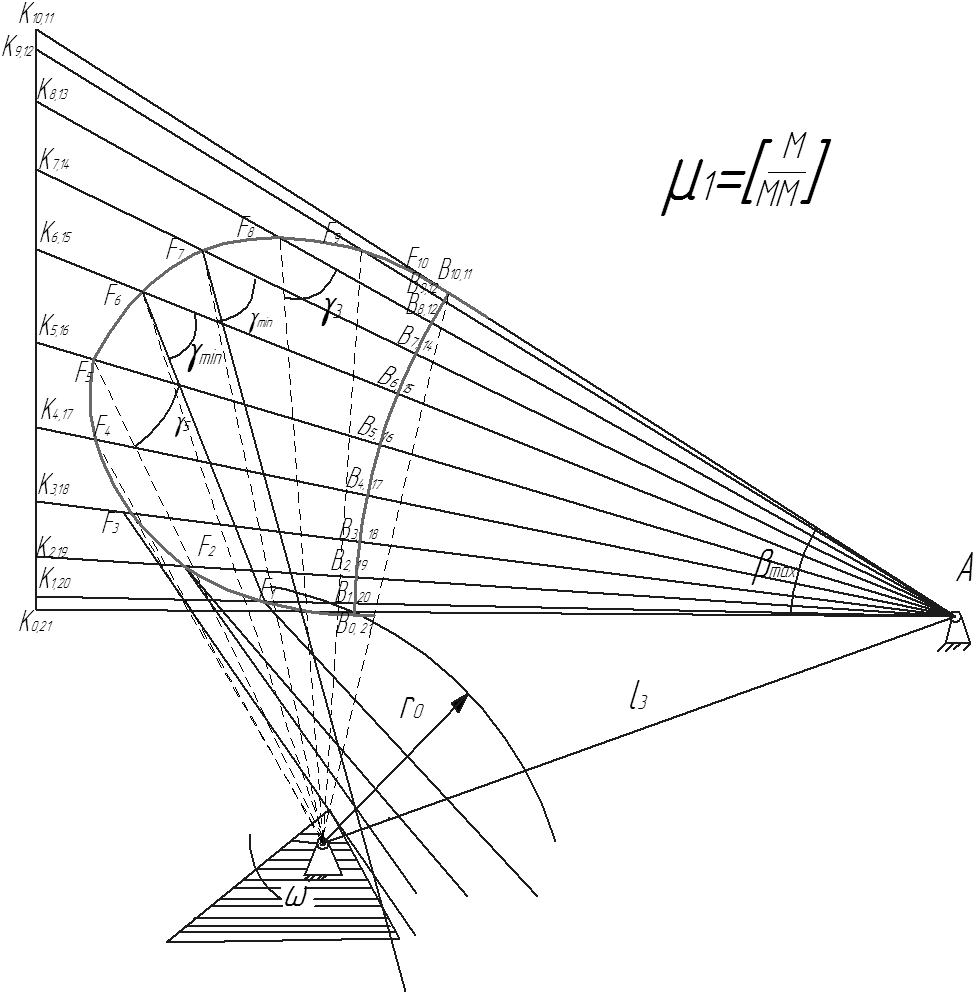
Рисунок 9.15 – К выбору ro кулачкового механизма с силовым замыканием
замыканием и вращающимся толкателем