

9.5 Построение центрового и действительного профилей кулачка
Рассмотрим кулачковый механизм с вращающимся кулачком и поступательно движущимся толкателем.
При построении центрового (теоретического) профиля кулачка пользуются методом обращения движения звеньев механизма: всей системе сообщается дополнительная угловая скорость, равная по модулю угловой скорости кулачка, но направленная в противоположную сторону. В результате чего кулачок оказывается неподвижным, стойка вращается с угловой скоростью - ωk, a толкатель совершает плоское движение. При этом направление оси толкателя будет проходить через центр вращения ролика, если кулачок центральный, и ось толкателя будет все время касательной к окружности радиуса е, если кулачок нецентральный (имеет эксцентриситет е). Точка контакта толкателя с кулачком будет перемещаться по профилю кулачка, то есть теоретический профиль кулачка представит траекторию движения конца толкателя (центра ролика в обращенном механизме).
Рассмотрим порядок построения центрового профиля кулачка (рис.9.16).
Проводится вертикальная линия, на которой откладываются соответствующие перемещения точки контакта толкателя В0, В1, В2 ... Вn в масштабе μl на фазе удаления и фазе возвращения соответственно. От этой линии откладывается отрезок, соответствующий эксцентриситету кулачка е и проводят линию параллельно оси движения толкателя. Затем находится точка О, центр вращения кулачка, сделав засечку на линии эксцентриситета из точки А~ отрезком, изображающим минимальный радиус кулачка
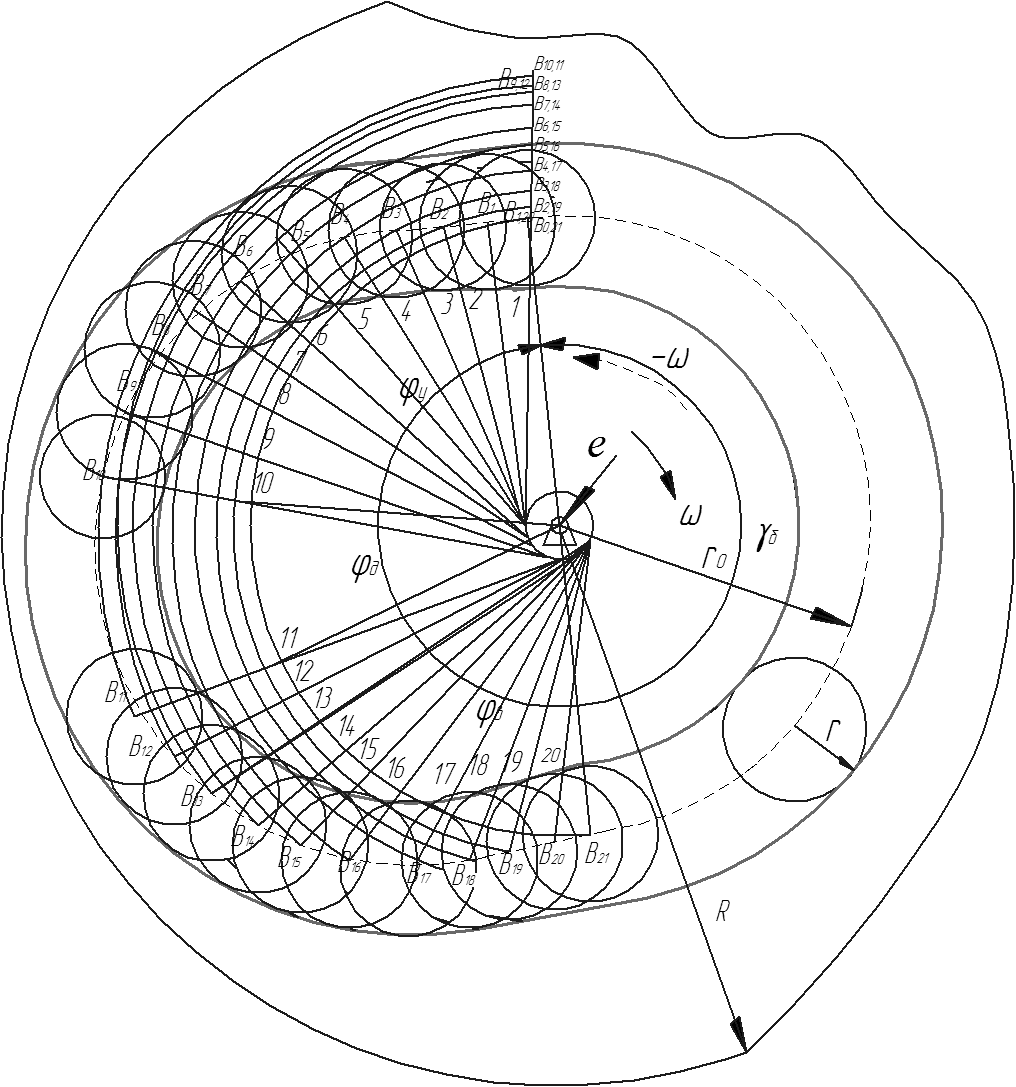
Рисунок 9.16 – Построение профилей кулачка с геометрическим замыканием
с поступательно движущимся толкателем
Проводится окружность радиуса ОВ0. От луча ОВ0 в направлении противоположном вращению кулачка откладываются последовательно углы φу φд φв φб. Углы φу и φв делятся на такое же число равных частей, ,как и при определении законов движения толкателя. Через полученные на окружности минимального радиуса точки деления 1, 2, 3 ... n проводятся касательные к окружности радиуса е. Через каждую точку Вi (на вертикали) проводится дуга с центром в точке О до пересечения с соответствующей касательной к окружности радиуса эксцентриситета. Точки пересечения В'1, В'2 ... В'n являются точками центрового профиля кулачка. С помощью лекал они соединяются плавной кривой. Участки профиля, соответствующие углам φд и φб являются дугами окружностей. Для получения практического профиля кулачка проводят радиусом ролика r возможно большее количество окружностей с центрами в точках центрового профиля. Огибающие кривые (внешняя и внутренняя) семейства этих окружностей дают профили пазового кулачка. Радиус ролика r должен удовлетворять двум условиям: r<0,4r0 и r<(0,7ч0,8) ρmin. Здесь ρmin - минимальный радиус кривизны центрового профиля кулачка, определенный графически.
В кулачковом механизме с силовым замыканием действительный профиль кулачка представляется только внутренней кривой.
Кулачковый механизм с вращающимся кулачком и вращающимся толкателем.
Построение теоретического профиля кулачка ведется в следующей последовательности. Изображается линия толкателя А0В0 в начальном положении. Методом засечек, используя размеры r0 и 1OB находится положение центра вращения кулачка О (рис. 9.17). Радиусом АВ0 описывается дуга, на которой от точки В0 откладывается угол βmax. В соответствии с ранее построенным графиком движения толкателя находятся точки А1, А2 ... Аn для выбранных значений φ.
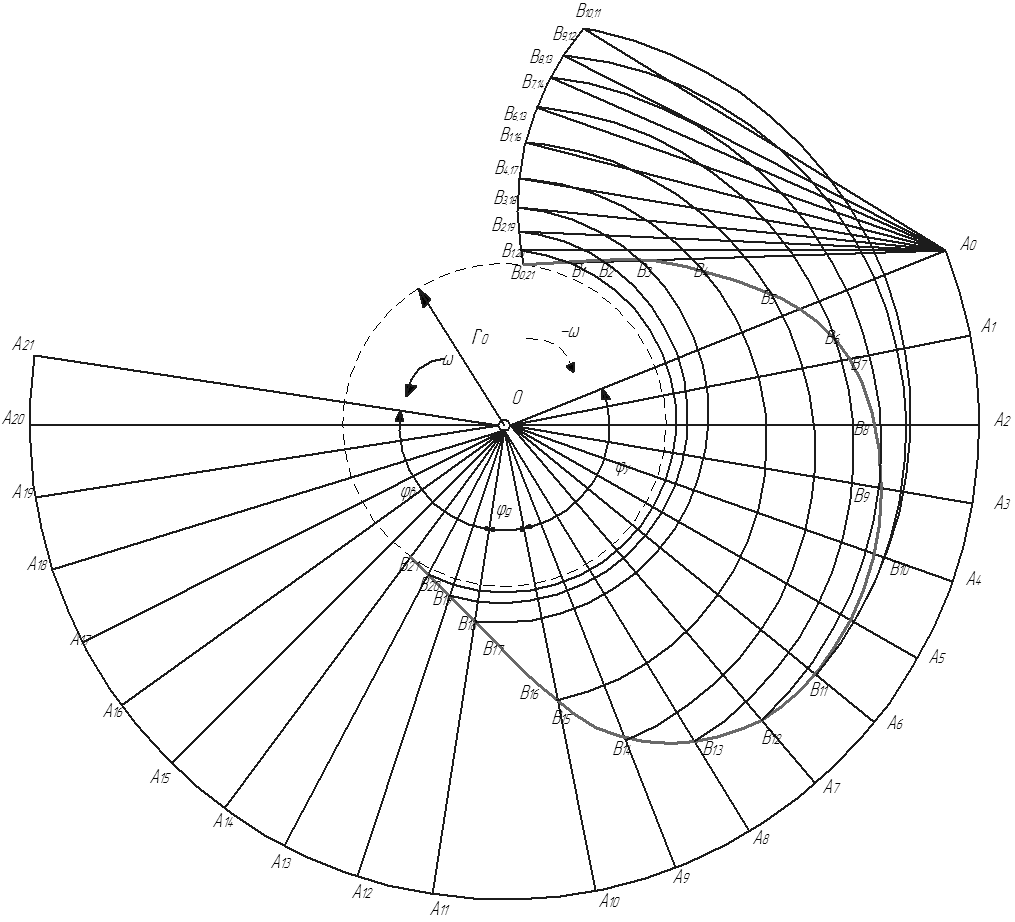
Рисунок 9.17 – Построение центрового профиля кулачка с
вращающимся толкателем
В обращенном механизме (кулачок неподвижен) толкатель совершает плоское движение, в котором его точка А описывает окружность радиуса ОА0. На окружности радиуса ОА от его начального положения откладываются фазовые углы φу φд φв φб. Углы φу и φв, делятся на столько же равных частей, что и при определении закона перемещения толкателя. Получаем точки Аi. Через каждую точку Вi проводится дуга окружности с центром в точке О. На соответствующих дугах из точек Аi делаются засечки радиусом АВ. Точки пересечения — это точки теоретического профиля кулачка — соединяют плавной кривой. Участки профиля, соответствующие φу и φв, являются дугами окружностей радиуса ОВ0 и ОВn.
Действительный профиль кулачка строится так же, как и в случае с поступательно движущимся толкателем. При этом если кулачок пазовый - строятся 2 профиля, если силовое замыкание - один.
Графические методы проектирования кулачковых механизмов позволяют наглядно представить все три основных этапа проектирования: выбор законов движения толкателя, выбор ro, построение профилей кулачка. В современных условиях обучения эти методы незаменимы, а использование современных систем автоматического проектирования (графических программ КОМПАС, АutoCAD, APM WinMachine и др.) существенно облегчают выполнение графической части проектирования.
ВЫВОДЫ
В промежуточном отчёте по научно-исследовательской работе представлены итоги двухлетней работы авторов, посвящённой анализу и методическому совершенствованию таких разделов механики, как структурный, кинематический и динамический анализ наиболее распространённых в современном машиностроении механизмов. К этим механизмам относятся: стержневые, зубчатые, кулачковые.
В полном объёме в отчёте представлен структурный анализ стержневых механизмов, принципы их образования и классификация. В разделах 2,3 рассмотрены методики кинематического и силового анализа этих механизмов графическими методами, наглядность которых играет важную роль в усвоении этого материала, что позволит в дальнейшем успешно решать подобные задачи аналитическими методами с использованием современной вычислительной техники.
Раздел 4 посвящён вопросам трения в кинематических парах, достаточно полно представлено динамическое исследование механизмов и машин, рассмотрены уравнения движения машины, коэффициент полезного действия, режимы работы машины – раздел 5.
В разделе 8 рассмотрены методики геометрического проектирования эвольвентного зубчатого зацепления, описаны качественные характеристики и методы их определения.
В разделе анализа и синтеза кулачковых механизмов детально были рассмотрены критерии выбора закона движения толкателя, а также основные этапы проектирования плоских кулачковых механизмов с вращающимся кулачком и толкателем, совершающем как поступательное, так и вращательное движение.