

2.3.7 Построение планов скоростей и ускорений кулисного механизма
Кулисные механизмы получили широкое распространение в машиностроительной и особенно в станкостроительной промышленности (привод резцовой головки строгального или долбежного станка, привод загребающей лапы погрузочной машины и т.д.).
Кулиса – это подвижное звено, которое служит направляющей для ползуна, часто называемого кулисным камнем. Кулиса может совершать различные движения: возвратно-вращательное, поступательное, вращательное.
Рассмотрим порядок и правила построения планов линейных скоростей и ускорений такого механизма и определим угловые скорости и ускорения его звеньев. В качестве примера возьмем плоский кулисный механизм - шестизвенник (рис. 2.6). Обозначим звенья и точки механизма, подлежащие исследованию. В нашем механизме : 1 – кривошип, 2 – камень, 3 – кулиса, 4 – камень, 5 – ползун, 6 – стойка. Заданы: план механизма, кинематические длины всех звеньев, закон движения (ω1 = const) и исходное положение входного звена – кривошипа 1.
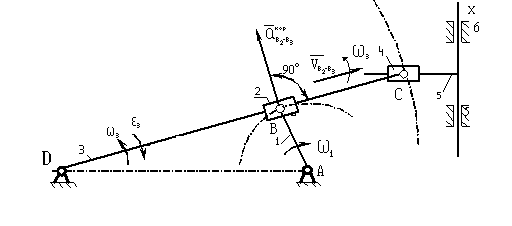
Рисунок 2.6 – План кулисного механизма
О пределяем
скорость точки В1
принадлежащей звену 1,VB1.
Условимся обозначать точку буквой с
индексом, обозначающим то звено, которому
точка принадлежит. Звено 1
совершает плоское вращательное движение.
Вектор скорости точки B1
направлен перпендикулярно радиусу
вращения АB,
пределяем
скорость точки В1
принадлежащей звену 1,VB1.
Условимся обозначать точку буквой с
индексом, обозначающим то звено, которому
точка принадлежит. Звено 1
совершает плоское вращательное движение.
Вектор скорости точки B1
направлен перпендикулярно радиусу
вращения АB,
![]()
По модулю абсолютная скорость точки B1
![]() .
.
Из произвольно выбранной точки PV, полюса плана скоростей, проводим луч перпендикулярно АB и откладываем отрезок PV b1 (рис. 2.7), длина которого определяется известным образом:
Определяем масштабный коэффициент плана скоростей:
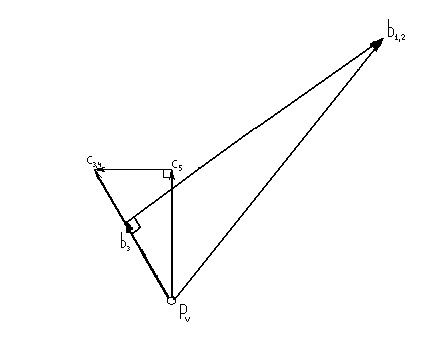
Рисунок 2.7 – План скоростей кулисного механизма
Определяем скорость
точки B2,
принадлежащей звену 2
– кулисному камню. Звено 2
совершает плоскопараллельное движение.
Точка B2
– лежит на геометрической оси вращательной
пары 1-2.
Следовательно,
абсолютные скорости точки B1,
принадлежащей звену 1,
и точки B2,
принадлежащей звену 2,
равны по модулю и совпадают по направлению
![]() .
На плане скоростей они будут изображаться
одним и тем же вектором PVb1,2.
.
На плане скоростей они будут изображаться
одним и тем же вектором PVb1,2.
Определяем скорость точки B3, принадлежащей звену 3 – кулисе. Вектор абсолютной скорости точки B3 - VB3 будет направлен по касательной к траектории точки B3, совпадающей в настоящий момент времени с точками B1 и B2. Звено 3 совершает возвратно-вращательное движение вокруг центра D. Траектория точки B3 – дуга о кружности с центром в точке D радиусa DB. Вектор абсолютной скорости VB3 направлен по касательной к траектории точки B3, а следовательно, по линии, перпендикулярной к DB.
Для определения VB3 воспользуемся разложением сложного плоскопараллельного движения звена 2. Разложим это движение на переносное и относительное. Переносящая среда для звена 2 – звено 3, которое переносит камень в своем возвратно-вращательном движении. Переносное движение камня 2 – движение вращения вместе со звеном 3. Звено 2 в процессе сложного движения перемещается по звену 3, как по направляющей. Это является относительным движением звена 2.
Рассмотрим абсолютное движение точки B2. Переносной скоростью точки B2 является абсолютная скорость точки B3, принадлежащей кулисе, как переносящей среде:
![]() .
.
Второе движение – относительное, является поступательным движением звена 2 по звену 3. Относительная скорость точки B2 по отношению к точке B3 направлена вдоль отрезка BD:
![]() .
.
Составляем векторное уравнение скорости движения точки B2:
![]() ;
;
![]()
![]() DB
|| DB
DB
|| DB
В полученном векторном уравнении две неизвестных скалярных величины: модули скоростей VB3 и VB2 – B3. Решаем уравнение графическим методом. Из полюса плана скоростей PV проводим линию, перпендикулярную BD, так как абсолютная скорость точки B3 будет изображаться отрезком, выходящим из PV. Через точку b1,2 плана скоростей проводим линию параллельно BD– линию действия вектора скорости VB2 – B3 .Точку пересечения проведенных прямых обозначаем b3. По правилу сложения векторов направляем стрелки на изображении векторов соответствующих скоростей. PVb3 - изображение скорости VB3, b3b1,2 – изображение скорости VB2 – B3. Модули скоростей:
![]() ;
;
![]() .
.
Определяем скорость точки С. Точка С является геометрической осью шарнира и принадлежит одновременно звену 3 – кулисе и звену 4 – камню.
![]()
Траектория точки С – окружность радиуса CD.Вектор абсолютной скорости точки С направлен перпендикулярно радиусу CD.
Рассмотрим точку С, как принадлежащую звену 3. Воспользовавшись теоремой подобия, можем составить пропорцию:
 .
.
Определяем длину
отрезка, изображающего
![]() на плане
скоростей:
на плане
скоростей:
 .
.
На продолжении отрезка db3 откладываем отрезок dc и обозначаем конец вектора c.
Определяем модуль скорости точки C:
![]()
Определим скорость точки C5 принадлежащей звену 5 – ползуну. Для этого воспользуемся разложением движения звена 4 на переносное и относительное. За переносное примем движение камня 4 вместе с ползуном 5 вдоль оси х – х – поступательное прямолинейное движение. За относительное примем перемещение звена 4 вдоль звена 5 перпендикулярно оси х – х. Абсолютная скорость любой точки звена 5, совершающего поступательное прямолинейное движение, направлена вдоль оси х – х.
![]() .
.
Относительная скорость точки C4 VC4 – C5, по отношению к точке C5, расположенной на звене 5 и совпадающей в данный момент времени с точками C3 и C4 при поступательном движении звена 4 вдоль звена 5, направлена перпендикулярно оси х – х:
![]()
Составляем векторное уравнение для определения абсолютной скорости точки C4:
![]()
VC4 =VC5 + VС4 - C5 .

 ||
x
– x
x
- x
||
x
– x
x
- x
В этом уравнении
две неизвестных скалярных величины:
модули скоростей
|![]() C5|
и |
С4
- C5|.
Решаем уравнение графическим методом.
Из полюса плана скоростей проводим
прямую, параллельную оси х
– х - линию
действия вектора абсолютной скорости
точки C5
звена 5.
Через точку
c3,4
на плане скоростей проводим прямую,
перпендикулярную оси х
– х, линию
действия вектора
относительной
скорости
C5|
и |
С4
- C5|.
Решаем уравнение графическим методом.
Из полюса плана скоростей проводим
прямую, параллельную оси х
– х - линию
действия вектора абсолютной скорости
точки C5
звена 5.
Через точку
c3,4
на плане скоростей проводим прямую,
перпендикулярную оси х
– х, линию
действия вектора
относительной
скорости
![]() .
Точку пересечения этих прямых обозначим
c5.
В соответствии с правилом сложения
векторов направляем стрелки. Отрезок
PVc5
на плане скоростей – изображение
абсолютной скорости точки C5
звена 5
-
C5.
Отрезок c5
c3,4
– изображение относительной скорости
С4
- C5.
.
Точку пересечения этих прямых обозначим
c5.
В соответствии с правилом сложения
векторов направляем стрелки. Отрезок
PVc5
на плане скоростей – изображение
абсолютной скорости точки C5
звена 5
-
C5.
Отрезок c5
c3,4
– изображение относительной скорости
С4
- C5.
Определяем модули скоростей:
![]() ;
;
![]() .
.
Построение планов скоростей закончено.
Определяем угловые скорости звеньев.
Угловая скорость кривошипа (звена 1) нам задана – ω1.
Угловая скорость звена 2 (кулисного камня), совершающего сложное плоскопараллельное движение может быть получена как векторная сумма угловых скоростей звена в переносном и относительном движениях:
![]() .
.
В нашем случае переносная угловая скорость звена 2 это абсолютная угловая скорость звена 3 – переносящей среды:
![]() .
.
Относительное движение звена 2 - это его поступательное движение вдоль
звена 3.
![]()
Таким образом мы получим, что угловая скорость звена 2 по модулю и направлению равна угловой скорости звена 3:
![]() .
.
Определяем угловую скорость звена 3 – кулисы.
Модуль угловой скорости кулисы:
Звено 3 вращается против часовой стрелки (см. направление действия вектора VB3).
Звено 4 (камень) в переносном и относительном движениях совершает поступательные движения. Поэтому его угловая скорость равна нулю:
![]() .
.
З вено
5
(ползун) совершает поступательное
движение: ω5
= 0.
вено
5
(ползун) совершает поступательное
движение: ω5
= 0.
При построении планов ускорений кулисного механизма будем использовать обозначения соответствующих точек и разложение движения звеньев, принятые при построении планов скоростей.
Определяем ускорение точки B1, принадлежащей вращающемуся звену 1. Ускорение точки B1 равно векторной сумме нормального и тангенциального ускорений:
![]()
BА АB
Модуль нормального ускорения:
![]() .
.
Вектор нормального
ускорения всегда направлен к центру
кривизны траектории точки. В нашем
случае
![]() направлен
от В
к А
(BА).
направлен
от В
к А
(BА).
Модуль тангенциального ускорения:
![]()
Вектор тангенциального ускорения направлен по касательной к траектории точки (перпендикулярно мгновенному радиусу вращения) в сторону, определяемую угловым ускорением ε.
Угловое ускорение
первого звена![]() =
0,
поскольку ω1
= const.Следовательно
=
0,
поскольку ω1
= const.Следовательно
![]() =
0. Отсюда:
=
0. Отсюда:
n
 aB1
= aB1
.
aB1
= aB1
.
И
з
произвольно выбранной точки Pa
- полюса
плана ускорений – проводим прямую,
параллельную BА
и в направлении от В
к А
откладываем
отрезок Pab1,
изображающий вектор абсолютного
ускорения
![]() (рис. 2.8).
(рис. 2.8).
Рисунок 2.8 – План ускорений кулисного механизма
Дальнейшее построение плана ускорений механизма будем выполнять с учетом выбранного масштабного коэффициента μa.
Определяем ускорение точки B2.
![]() .
.
На плане ускорений
![]() изображается
тем же отрезком, что и
изображается
тем же отрезком, что и
![]() –
Pab1,2.
–
Pab1,2.
О пределяем ускорение точки B3. Для этого воспользуемся разложением сложного движения звена 2, как и при определении абсолютной линейной скорости VB3:
пер отн
кор
aB2 = aB2 + aB2 +aB2 . (2.26)
Абсолютное ускорение точки B2 в сложном движении является векторной суммой переносного, относительного и кориолисова ускорений.
Переносное движение – возвратно-вращательное движение кулисы 3. Переносное ускорение точки B2 камня равно абсолютному ускорению точки B3 кулисы:
пер отн
кор
aB2 = aB3 .
Звено 3 совершает возвратно-вращательное движение, поэтому абсолютное ускорение точки B3 является векторной суммой нормального и тангенциального ускорений:
n τ
aB3 = aB3 + aB3 .
n
В ектор нормального ускорения aB3 направлен от В к D. Модуль нормального ускорения:
![]()
![]() .
.
Вектор
тангенциального ускорения
![]() направлен
перпендикулярно DB.
Модуль
направлен
перпендикулярно DB.
Модуль
![]() неизвестен.
неизвестен.
Относительное
ускорение
![]() в
относительном движении направлено
вдоль отрезка BD:
в
относительном движении направлено
вдоль отрезка BD:
![]() =
=![]() .
.
|| BD
Кориолисово ускорение равно двойному векторному произведению угловой скорости переносного движения и линейной скорости относительного движения:
![]()
Угловая скорость
переносного движения
![]() в нашем
случае равна угловой скорости звена 3:
в нашем
случае равна угловой скорости звена 3:
![]()
Относительная
линейная скорость
![]() в нашем случае равна относительной
скорости перемещения точки B2
по
отношению к точке B3:
в нашем случае равна относительной
скорости перемещения точки B2
по
отношению к точке B3:
![]() =
=![]() .
.
Можно определить
![]() =
2
=
2![]()
![]() .
.
Определяем модуль кориолисова ускорения:
![]() =
2
=
2![]()
![]()
![]() ,
,
г де α – угол между направлениями векторов угловой ω3 и линейной VB2-B3 скоростей.
В нашем случае вектор угловой скорости ω3 направлен перпендикулярно плоскости чертежа. Вектор относительной скорости VB2-B3 лежит в плоскости чертежа. Угол между векторами угловой и относительной скоростей α = 90°,sin α = sin 90° = 1, следовательно:
![]()
Определяем направление вектора кориолисова ускорения по правилу Н.Е.Жуковского. Для этого необходимо вектор относительной скорости повернуть в направлении переносной угловой скорости на 90°. (Переносим VB2 -B3 на план механизма и поворачиваем его на 90° по направлению ω3). В нашем случае aB2 BD.
Подставим в исходное уравнение (2.9) полученные данные:
![]()
B![]() D
BD
|| BD
BD
D
BD
|| BD
BD
Получаем векторное
уравнение с двумя скалярными неизвестными:
модулями ускорений
![]() и
и
![]() .
Решаем
уравнение графическим методом. Из полюса
плана ускорений Pa
проводим
линию параллельно BD
– направление
нормального ускорения точки B3
-
.
Решаем
уравнение графическим методом. Из полюса
плана ускорений Pa
проводим
линию параллельно BD
– направление
нормального ускорения точки B3
-
![]() .
.
Определяем длину отрезка на плане ускорений:
Откладываем отрезок
Pan3
и конец
вектора обозначаем n3.
Через точку
n3
на плане ускорений проводим линию
BD
(а следовательно
и
Pan3)
– линию действия тангенциального
ускорения
![]() .
.
Вектор
![]() является замыкающим в сумме векторов.
Определим длину отрезка kb1,2
=
является замыкающим в сумме векторов.
Определим длину отрезка kb1,2
=![]() ,
откладываем отрезок на плане ускорений
BD
и направляем вектор в точку b1,2.
Затем через точку k
проводим параллельно BD
линию
действия
вектора относительного ускорения
,
откладываем отрезок на плане ускорений
BD
и направляем вектор в точку b1,2.
Затем через точку k
проводим параллельно BD
линию
действия
вектора относительного ускорения
![]() ,
до пересечения с линией
действия
тангенциального ускорения
,
до пересечения с линией
действия
тангенциального ускорения
![]() .
Полученную точку пересечения обозначаем
b3.
Проставляем направление
векторов
и
по правилу
сложения векторов.
Соединяем
Pa
с точкой b3
на плане
ускорений. Отрезок Pab3
является
изображением абсолютного ускорения
точки B3
-
.
Полученную точку пересечения обозначаем
b3.
Проставляем направление
векторов
и
по правилу
сложения векторов.
Соединяем
Pa
с точкой b3
на плане
ускорений. Отрезок Pab3
является
изображением абсолютного ускорения
точки B3
-![]() .
Определяем модули ускорений:
.
Определяем модули ускорений:
![]() ;
;
![]() ;
;
![]() .
.
Определяем ускорение точки C3, принадлежащей звену 3. Для этого воспользуемся теоремой подобия. Составляем пропорцию:
На продолжении отрезка Pab3 на плане ускорений откладываем отрезок Pac3 –
и зображениe вектора абсолютного ускорения точки C3 - aC3.
Определяем абсолютное ускорение точки C5 – aC5. Для этого воспользуемся предыдущим разложением сложного движения звена 4: переносное – поступательное параллельно оси х – х вместе с ползуном и относительное – поступательное перпендикулярно оси х – х. Составляем векторное уравнение ускорения точки C4:
aC4 = aC5 + aC4 – C5.

 ||
x-x
x-x
||
x-x
x-x
П олученное векторное уравнение имеет две скалярных неизвестных: модули ускорений aC5 и aC4 – C5. Решаем уравнение графическим методом. Из полюса Pa проводим линию параллельно х – х. Из точки с3,4 проводим прямую перпендикулярно х – х. На пересечении этих прямых получаем точку C5. Направление векторов проставляем в соответствии с правилом сложения векторов.
Определяем модули полученных ускорений:
aC5 = (Pac5) μa ;
aC4 – C5 = (c3,4c5) μa .
Определяем угловые ускорения звеньев.
Угловое ускорение звена 1 – ε1 = 0.
Угловое ускорение звена 2 равно угловому ускорению звена 3:
ε2 = ε3.
Угловое ускорение звена 3:
и направлено в сторону, определяемую направлением вектора aB3 .
![]()