

8.6 Параметры эвольвентного колеса, нарезанного
инструментом реечного типа
Изобразим схему нарезания зубчатого колеса инструментом реечного типа (рисунок 8.16) и определим размеры нарезаемого колеса.
Заготовка вращается со скоростью заг, а инструментальная рейка движется поступательно со скоростью Vрейки – это реечное станочное зацепление.
На линии ОК существует такая точка Р, в которой линейные скорости заготовки и рейки одинаковы:
![]() .
(8.13)
.
(8.13)
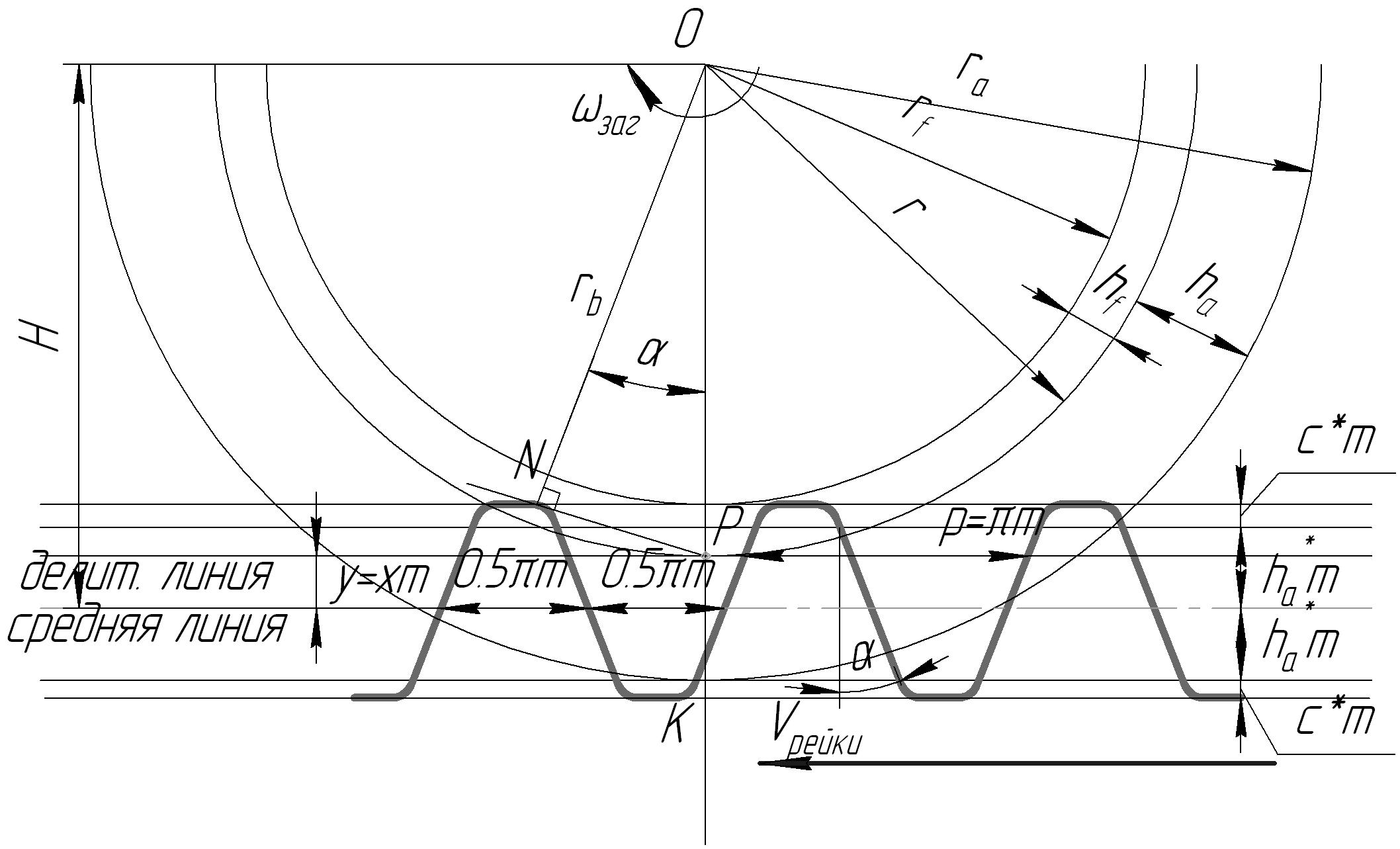
Рисунок 8.16 – Схема нарезания эвольвентного колеса инструментом
реечного типа
делительной линии рейки переносятся на делительную окружность колеса без искажения. Следовательно, шаг по делительной окружности равен стандартному шагу исходного контура Р = m. Радиус делительной окружности обозначается r.
Длина делительной окружности: 2r = рz, где z – число зубьев нарезаемого колеса; подставим значение р: 2r = mz, откуда
r = 0,5mz (8.14)
Линия NP, проходящая через точку Р перпендикулярно боковому профилю зуба рейки и к нарезаемой эвольвенте, является касательной к основной окружности. Это линия станочного зацепления. Следовательно, перпендикуляр ON, является радиусом основной окружности нарезаемого колеса – rb, а угол NOP – угол станочного зацепления, он равен профильному углу рейки, т.е. = 200. Из треугольника ONP получаем:
rb = rcos, rb = 0,5mzcos (8.15)
Расстояние между и делительной линиями рейки «у» называется смещением рейки.
Отношение смещения рейки к модулю называется коэффициентом смещения:
![]() (8.16)
(8.16)
Обозначим расстояние от центра заготовки до средней линии рейки –Н (рис.8.16) При нарезании зубчатого колеса возможны три варианта установки инструмента, т.е рейки относительно центра заготовки:
H=r, y=0, x=0 – нарезается нулевое колесо – колесо без смещения. При этом средняя линия рейки катится без скольжения по делительной окружности заготовки, толщина зуба по делительной окружности равна ширине впадины.
H>r, y>0, x>0 – нарезается колесо с положительным смещением. Рейка отодвинута от центра заготовки, толщина зуба по делительной окружности больше ширины впадины.
H<r, y<0, x<0 – нарезается колесо с отрицательным смещением. Рейка придвинута к центру заготовки. Толщина зуба по делительной окружности меньше ширины впадины.
Делительная окружность делит зуб колеса по высоте на два участка, называемые головкой и ножкой зуба. Часть зуба, расположенная вне делительной окружности, называется головкой зуба. Высота головки зуба обозначается hа. Окружность, проходящая по вершинам головок зубьев, называется окружностью вершин колеса. Радиус окружности вершин обозначается rа. По рисунку 8.16 получаем:
![]() (8.17)
(8.17)
![]() ,
или окончательно
,
или окончательно
![]() (8.18)
(8.18)
Отметим, что радиус окружности вершин может определяться и из других соображений (см. п. 8.11).
Часть зуба, расположенная внутри делительной окружности, называется ножкой зуба. Высота ножки зуба обозначается hf. Окружность, проходящая по основаниям ножек зубьев, называется окружностью впадин. Радиус окружности впадин обозначается rf. По рисунку 8.16 :
![]() (8.19)
(8.19)
![]() ,
,
![]() (8.20)
(8.20)
Определим толщину зуба S и ширину впадины е нарезаемого колеса по делительной окружности. Зуб колеса формируется впадинами инструмента, поэтому (рисунок 8.17) : eu=S, Su=e, где
Su и eu – размеры на инструменте, а S и e – на нарезаемом колесе.
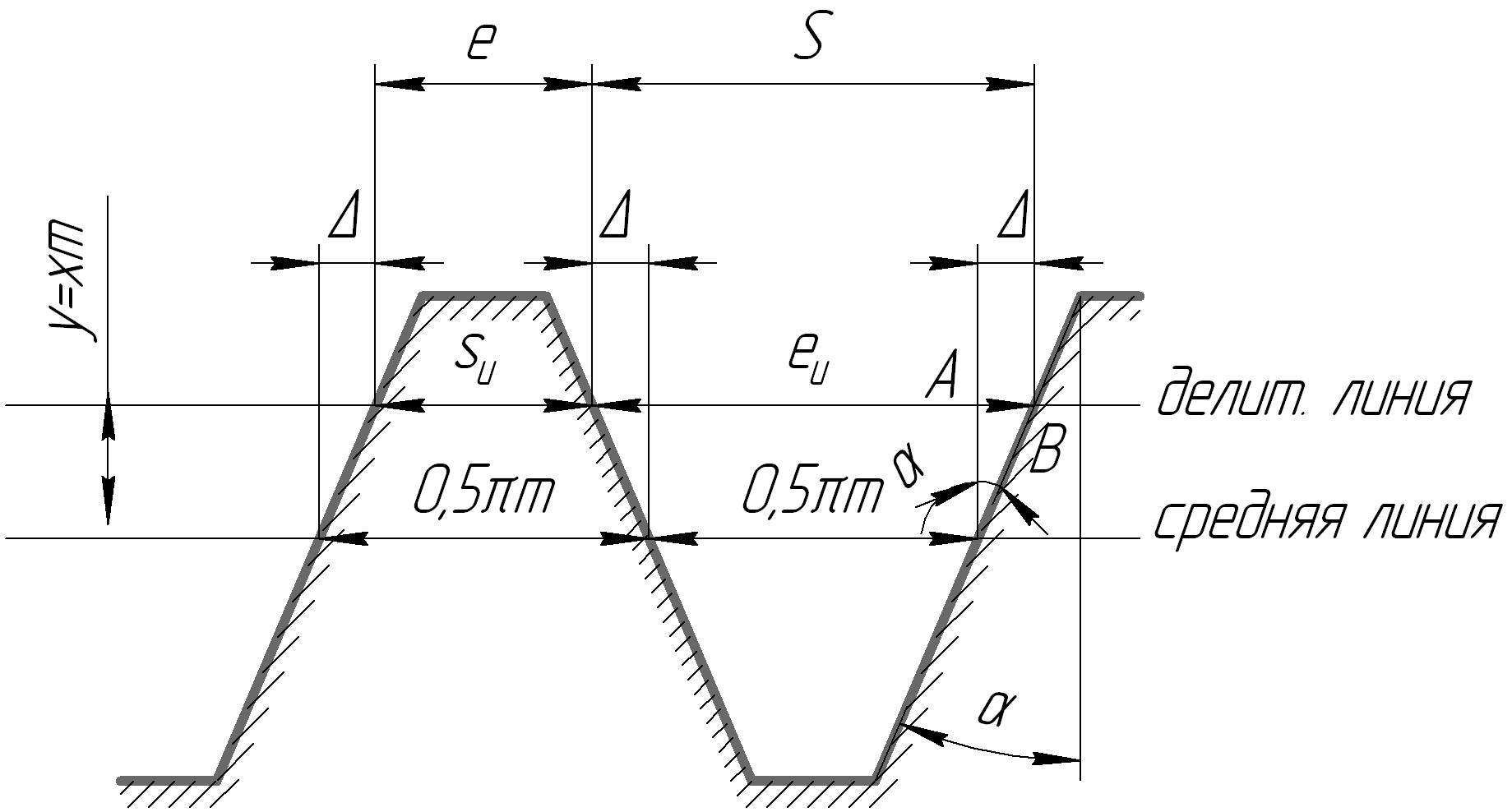
Рисунок 8.17 – К определению толщины зуба S и ширины впадины е
Так как при нарезании нулевого колеса все размеры со средней линии рейки переносятся на делительную окружность колеса без искажения, то у нулевого колеса по делительной окружности получаем:
S=e= 0,5m (8.21)
При нарезании колеса со смещением у=x m размеры с делительной линии переносятся на делительную окружность колеса без искажения, следовательно, у колеса со смещением S e.
Согласно рисунку 8.17 имеем : S=0,5m +2.
Отрезок определим из прямоугольного треугольника АВС :
= уtg =xmtg.
Тогда получаем толщину зуба по делительной окружности :
S = m(0,5+2xtg) (8.22)
Аналогично, ширина впадины по делительной окружности :
e = 0,5m - 2,
e =m(0,5 - 2xtg). (8.23)
В формулах (8.16 – 8.23) коэффициент смещения – величина алгебраическая, то есть х имеет знак + при положительном смещении рейки и - при отрицательном смещении.
Из формулы (8.22) следует, что при положительном смещении толщина зуба колеса по делительной окружности увеличивается по сравнению с нулевым колесом, а при отрицательном смещении – уменьшается. Следовательно, положительное смещение инструмента приводит к упрочнению зуба колеса, что часто используется в зубчатых передачах, передающие значительные мощности.