

5.6.4 Уравнения движения машины в дифференциальной форме
Дифференциальные уравнения движения машины можно получить путем использования методов приведения сил и масс.
Запишем теорему об изменении кинетической энергии системы материальных тел на бесконечно малом перемещении:
![]() (5.1)
(5.1)
где А - работа всех внешних сил, реально действующих в машине; Т - кинетическая энергия всех звеньев машины.
На бесконечно малом перемещении работа сил бесконечно малая величина и изменение кинетической энергии также бесконечно мало. Разделим обе части уравнения на бесконечно малую величину dt:
![]() ,
,
![]() ,
,
где
![]() - мгновенная мощность всех сил, действующих
на звенья механизма.
- мгновенная мощность всех сил, действующих
на звенья механизма.
Метод приведения масс и сил позволяет нам выразить N и Т машины через приведенную массу и приведенную силу. Тогда теорема об изменении кинетической энергии запишется в следующем виде:
![]() .
.
5.6.4.1 Звено приведения движется поступательно
Рассмотрим случай поступательного движущегося звена приведения (материальной точки). В этом случае вся система может быть представлена материальной точкой, движущейся со скоростью Vпр и ускорением апр под действием силы Fпр и имеющей массу mпр (рисунок 5.6). Тогда мощность звена приведения:
![]() ,
(5.2)
,
(5.2)
а его кинетическая энергия:
![]() .
(5.3)
.
(5.3)
 .
(5.4)
.
(5.4)
Рисунок 5.6 - Поступательное движение звена приведения
В правой части уравнения мы имеем производную от произведения двух переменных величин mпр=m(x, V, t) и Vпр=V(x, t). Как правило mпр=f1(t), Fпр=f2(t) и Vпр=f3(t). Возьмем производную от произведения двух переменных величин mпр и Vпр по времени t:
 ,
(5.5)
,
(5.5)
здесь
![]() - ускорение материальной точки.
- ускорение материальной точки.
Разделим и умножим первый член правой части полученного равенства на бесконечно малую величину dSпр - перемещение материальной точки приведения:
 ,
,
здесь
![]() - скорость материальной точки приведения.
- скорость материальной точки приведения.
Подставим полученное выражение в исходное уравнение (5.4):
![]() .
(5.6)
.
(5.6)
Сократим левую и правую части уравнения (5.6) на Vпр:
![]() .
(5.7)
.
(5.7)
Уравнение (5.7)-
дифференциальное уравнение движения
машины в
Если mпр=const,
т.е. ![]() и
и
![]() ,
,
уравнения поступательно движущегося звена.
5.6.4.2 Звено приведения совершает вращательное движение
Рассмотрим случай,
Jпр=J(, , t), Мпр=М(, , t).
Запишем уравнение движения звена приведения:
 .
(5.8)
.
(5.8)
Выполним преобразования, аналогичные тем, которые мы выполним при выводе уравнения (5,7):
 ,
,
где![]() - угловое ускорение звена приведения.
- угловое ускорение звена приведения.
 ,
,
где
пр
– перемещение звена приведения;
![]() - угловая скорость звена приведения.
- угловая скорость звена приведения.
 Рисунок
5.7 - Звено приведения совершает вращательное
движение
Рисунок
5.7 - Звено приведения совершает вращательное
движение
Тогда
![]() ,
откуда получаем:
,
откуда получаем:
![]() .
(5.9)
.
(5.9)
Уравнение Мпр - дифференциальное уравнение движения машины в общем виде в случае вращательного движения звена приведения.
Для случая Jпр=const,
![]() уравнение Мпр
принимает вид Мпр=Jпрпр
- уравнение движения звена приведения
совершающего вращательное движение,
если все звенья механизма вращающиеся
и имеют постоянные массовые характеристики.
уравнение Мпр
принимает вид Мпр=Jпрпр
- уравнение движения звена приведения
совершающего вращательное движение,
если все звенья механизма вращающиеся
и имеют постоянные массовые характеристики.
Уравнение Fпр более универсально. Уравнение Мпр применяется только в случае, когда звено приведения совершает вращательное движение, а точка может принадлежать звену, совершающему любое движение. На практике чаще используют уравнение Мпр в связи с тем, что силы и массы чаще приводят к валу двигателя - вращающемуся звену. Задача динамики машины чаще сводится к нахождению момента двигателя по заданному закону движения машины и некоторым силам, действующим на звенья машины.
![]() .
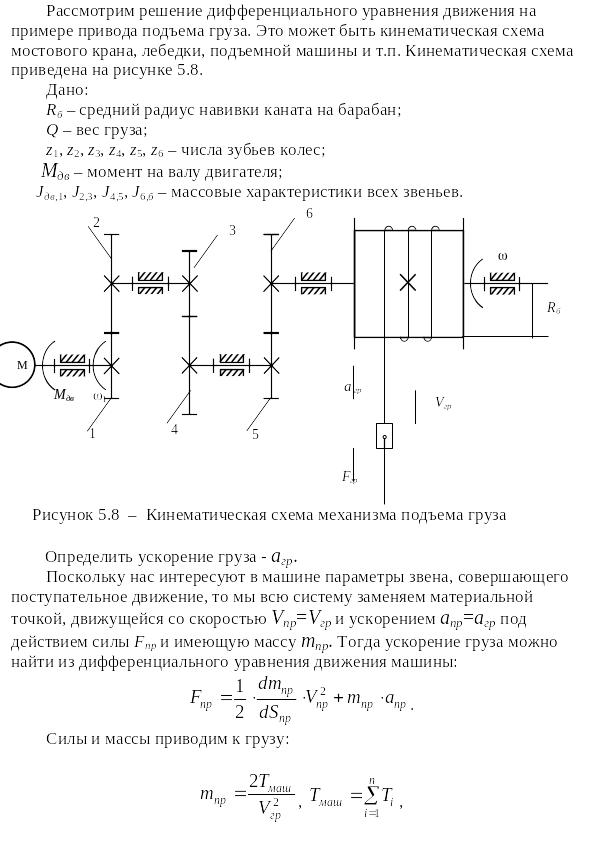
.
Подставим полученное Tмаш в mпр и сократим на:
 .
.
Линейную скорость груза выразим через угловую скорость барабана и его радиус:
![]() .
.
Тогда
 .
.
Но
![]() ;
;
![]() ;
;
![]() .
.
Из анализа уравнения mпр видно, что все составляющие, входящие в уравнение, постоянны, следовательно, mпр=const (если пренебречь весом каната), тогда:
![]() ,
,
![]() .
.
Находим величину Fпр из условия равенства мощностей:
![]() ,
,
![]() .
.
Внешние силы - вес груза Q и момент двигателя Mдв. 1 противоположно 6. Момент на валу двигателя должен быть направлен в сторону 1.
Мощность всех сил:
![]() .
.
Тогда
![]() ,
,
![]() - берем по модулю, т.к. знак передаточного
отношения мы учли при определении
мощностей:
- берем по модулю, т.к. знак передаточного
отношения мы учли при определении
мощностей:
![]() .
.
При различных числовых значениях возможны следующие варианты:
1) Fпр=0, апр=0 – равномерное движение груза;
2) Fпр>0, апр>0 – ускоренное движение груза;
3) Fпр<0, апр<0 – замедленное движение груза.