

3.3 Условие статической определимости кинематической цепи
Силовой расчет механизма, осуществляемый с учетом сил инерции его звеньев, называется кинетостатическим.
Каждая реакция в кинематической паре определяется тремя скалярными параметрами: точкой приложения, величиной, положением линии действия. Т.е. каждая неизвестная или неполностью известная реакция вносит в скалярное уравнение от одной до трех неизвестных скалярных величин.
В первом приближении будем вести расчет без учета сил трения в кинематических парах, т.е. поверхности контакта звеньев будем считать идеальными. В таком случае линии действия реакций в парах будут направлены по нормалям к их элементам.
В одноподвижной
вращательной паре линия действия
реакции, например, Rm,p
пересекает ось шарнира, т.е. точкой
приложения ее можно считать центр
шарнира; величина и направление этой
реакции неизвестны, что эквивалентно
двум скалярным неизвестным величинам.
Для отыскания такой реакции представим
ее в виде нормальной
![]() и тангенциальной
и тангенциальной
![]() составляющих.
составляющих.
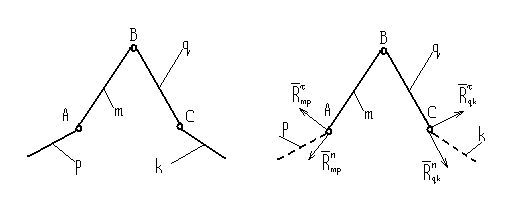
Рисунок 3.3 – Реакция во вращательной кинематической паре
Линии действия этих составляющих располагаем вдоль соединяющего центры шарниров А и В отрезка АВ ( ) и перпендикулярно ему ( ).
Аналогично разложена
на две составляющие реакция
![]() .
.
В одноподвижной поступательной паре реакция направлена перпендикулярно направляющей, но неизвестны ее величина и точка приложения, что эквивалентно двум скалярным неизвестным величинам.
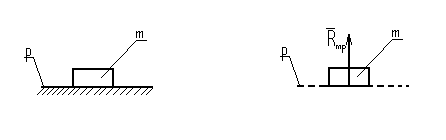
Рисунок 3.4 – Реакция в поступательной кинематической паре
В двухподвижной высшей паре реакция приложена в точке контакта звеньев, ее линия действия направлена по общей нормали к поверхностям в точке их контакта, и только величина ее неизвестна, что соответствует только одной скалярной неизвестной величине.
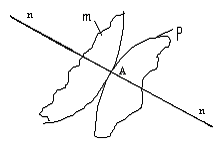

Рисунок 3.5 – Реакция в высшей кинематической паре
Таким образом, для кинематической цепи из п звеньев, содержащей Р1 одноподвижных пар и Р2 двухподвижных, справедливо следующее.
Общее количество скалярных неизвестных параметров реакций во всех парах цепи после замены высших двухподвижных пар низшими одноподвижными составляет 2Р1.
Для каждого звена можно составить 3 скалярных уравнения равновесия, всего 3п.
Т.е. рассматриваемая
цепь будет статически определимой, если
3п=2Р1,
т.е.
![]() .
.
Последнее уравнение характеризует структурную группу Ассура. Следовательно, разделяя механизм на части с целью сделать реакции в парах внешними силами и тем самым ввести их в уравнения для их отыскания, нужно в качестве таких частей брать группы Ассура.
3.4 Силовое исследование механизма по методу академика н.Г.Бруевича.
Этот вопрос будет рассмотрен на примере шарнирного четырехзвенника.
Обычно бывают известны:
план механизма в исследуемом положении (рис. 3.6);
закон движения ведущего звена (
 );
);массы
 и моменты инерции
и моменты инерции
 звеньев, положения их центров масс;
звеньев, положения их центров масс;внешние нагрузки, приложенные к звеньям, в том числе силы тяжести звеньев
 ,
сила полезного сопротивления
,
сила полезного сопротивления
 .
.
Требуется определить
реакции во всех кинематических парах
и уравновешивающую нагрузку
(уравновешивающую силу
![]() и/или уравновешивающий момент сил
и/или уравновешивающий момент сил
![]() ),
приложенную к звену 1.
),
приложенную к звену 1.
Кинетостатический расчет механизма будет осуществлен без учета трения в кинематических парах.
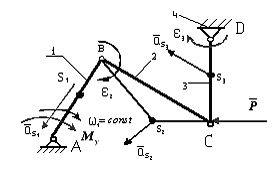
Рисунок 3.6 – План механизма в исследуемом положении
Начать расчет
следует с построения планов скоростей
и ускорений для исследуемого положения
механизма по заданному закону движения
ведущего звена 1
(см. раздел 2).
С помощью этих планов определяем
ускорения центров тяжести
![]() и угловые ускорения
звеньев. А это позволяет определить
главные векторы
и главные моменты
сил инерции звеньев (см. п. 3.2)
для рассмотрения их как находящихся в
равновесии с целью определения искомых
нагрузок из уравнений статики.
и угловые ускорения
звеньев. А это позволяет определить
главные векторы
и главные моменты
сил инерции звеньев (см. п. 3.2)
для рассмотрения их как находящихся в
равновесии с целью определения искомых
нагрузок из уравнений статики.
Таким образом, и далее считаем известными.
Рассмотрим группу, состоящую из звеньев 2 и 3 (диада Ассура).
Для этого прежде всего с учетом масштабного коэффициента длины изобразим звенья 2 и 3 с сохранением их положений.
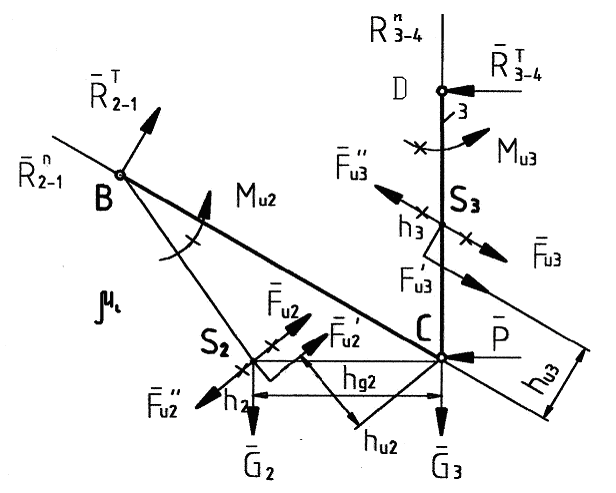
Рисунок 3.7 – План группы 2,3
На плане группы
изобразим (не обязательно с соблюдением
масштабного коэффициента сил) внешние
нагрузки, приложенные к звеньям 2
и 3,
и инерционные нагрузки. Моменты сил
,![]() заменены парами сил (см. п. 3.2).
заменены парами сил (см. п. 3.2).
Реакции на
оставленные в рассмотрении звенья 2
и 3 со
стороны мысленно отсоединенных звеньев
1 и
4
(![]() и
и
![]() )
разложены каждая (см. п. 3.3)
на нормальную и тангенциальную
составляющие (см. рис. 3.7).
Направления тангенциальных составляющих
)
разложены каждая (см. п. 3.3)
на нормальную и тангенциальную
составляющие (см. рис. 3.7).
Направления тангенциальных составляющих
![]() и
и
![]() являются предполагаемыми (они указаны
наугад); об определении их истинных
направлений см. ниже.
являются предполагаемыми (они указаны
наугад); об определении их истинных
направлений см. ниже.
Метод решения
задачи не требует предполагать направления
нормальных составляющих
![]() и
и
![]() ,
он позволяет сразу найти их истинные
направления путем построения замкнутого
многоугольника сил, действующих на
звенья 2
и 3,
и их сил инерции (см. рис. 3.8).
,
он позволяет сразу найти их истинные
направления путем построения замкнутого
многоугольника сил, действующих на
звенья 2
и 3,
и их сил инерции (см. рис. 3.8).
Рассмотрим как
находящееся в равновесии звено 2
(без звена 3).
В этом случае в уравнениях равновесия
звена 2
должна быть учтена реакция
![]() ,
о которой известно лишь то, что ее линия
действия проходит через точку С.
Уравнение моментов сил, действующих на
звено 2,
относительно точки С
является разрешимым, т.к. единственной
скалярной неизвестной величиной в нем
является
,
о которой известно лишь то, что ее линия
действия проходит через точку С.
Уравнение моментов сил, действующих на
звено 2,
относительно точки С
является разрешимым, т.к. единственной
скалярной неизвестной величиной в нем
является
![]() ;
силы
и
;
силы
и
![]() в это уравнение не войдут, т.к. их линии
действия проходят через точку С,
следовательно, их моменты относительно
точки С
порознь равны нулю.
в это уравнение не войдут, т.к. их линии
действия проходят через точку С,
следовательно, их моменты относительно
точки С
порознь равны нулю.
Здесь и в дальнейшем при составлении уравнений моменты сил, направленные против хода часовой стрелки, будем измерять положительными числами, по ходу – отрицательными.
![]()
![]()
 (3.3)
(3.3)
Получение решения
в виде
![]() >0
свидетельствует о том, что предположенное
направление
является истинным, в противном случае
истинное направление противоположно
предположенному.
>0
свидетельствует о том, что предположенное
направление
является истинным, в противном случае
истинное направление противоположно
предположенному.
Аналогично рассматриваем равновесие звена 3:
![]()
![]() (3.4)
(3.4)
В нашем случае, когда на звенья 2 и 3 действуют нагрузки только в виде сил (моменты сил заменены парами сил), можно в уравнения (3.3) и (3.4) подставлять не величины плеч сил, а длины их чертежных изображений, измеренные, например, в миллиметрах чертежа.
Определяем
нормальные составляющие сил реакций в
шарнирах В
и D:
![]() .
Для этого рассмотрим равновесие группы
звеньев 2,3.
Составляем условие равновесия группы:
.
Для этого рассмотрим равновесие группы
звеньев 2,3.
Составляем условие равновесия группы:
![]() - геометрическая сумма сил, действующих
на группу звеньев 2,3
равна нулю. Запишем это условие. Порядок
записи может быть произвольным, но для
облегчения дальнейшей работы примем
его таким: сначала перечисляем все силы,
действующие на звено 2,
начиная с тангенциальной составляющей
силы реакции в шарнире В -
- геометрическая сумма сил, действующих
на группу звеньев 2,3
равна нулю. Запишем это условие. Порядок
записи может быть произвольным, но для
облегчения дальнейшей работы примем
его таким: сначала перечисляем все силы,
действующие на звено 2,
начиная с тангенциальной составляющей
силы реакции в шарнире В -
![]() ,
затем перечисляем все силы, действующие
на звено 3
заканчивая тангенциальной составляющей
силы реакции в шарнире D
-
,
затем перечисляем все силы, действующие
на звено 3
заканчивая тангенциальной составляющей
силы реакции в шарнире D
-
![]() .
.
![]() .
(3.5)
.
(3.5)
Сложение сил
выполняем графически, для чего задаёмся
масштабным коэффициентом сил
![]()
![]() .
С учётом масштабного коэффициента
последовательно складываем силы,
перечисленные в уравнении (3.5).
При решении уравнения графическим
методом определяем
.
С учётом масштабного коэффициента
последовательно складываем силы,
перечисленные в уравнении (3.5).
При решении уравнения графическим
методом определяем
![]() и
и
![]() (см. рис. 3.8).
С учётом
(см. рис. 3.8).
С учётом
![]() находим их абсолютные значения. Имея
нормальные и тангенциальные составляющие
сил реакций в шарнирах В
и D,
находим их полные значения, как векторные
суммы:
находим их абсолютные значения. Имея
нормальные и тангенциальные составляющие
сил реакций в шарнирах В
и D,
находим их полные значения, как векторные
суммы:
Рисунок 3.8 – Планы сил, действующих на звенья 2 и 3 и их сил инерции
![]() (3.6)
(3.6)
![]() (3.7)
(3.7)
Определяем силу реакции в шарнире С.
Для этого
рассматриваем равновесие звена
2. На звено
2
действуют все ранее указанные силы и
неизвестная сила реакции
![]() в шарнире С, действующая на звено 2
со стороны отсоединённого звена 3.
в шарнире С, действующая на звено 2
со стороны отсоединённого звена 3.
Составляем уравнение
равновесия звена
2, из которого
графическим способом определяем
![]() :
:
![]() .
(3.8)
.
(3.8)
В случае, если бы порядок изображения векторов сил уравнения (3.8) был произвольным, было бы необходимо построить еще три дополнительных многоугольника сил для решения уравнений (3.5), (3.6), (3.7). При выбранном же порядке в качестве каждого из этих трех многоугольников сил может быть рассмотрена нужная часть многоугольника сил на рис. 3.8.
Определим теперь
![]() - реакцию в шарнире А
и приложенный к кривошипу 1
уравновешивающий момент сил
- реакцию в шарнире А
и приложенный к кривошипу 1
уравновешивающий момент сил
![]() .
Для этого рассмотрим как находящееся
в равновесии звено 1.
.
Для этого рассмотрим как находящееся
в равновесии звено 1.
Рисунок 3.9 – Схема нагружения кривошипа
Изобразим кривошип
в исследуемом пложении с учетом
масштабного коэффициента длины
![]() .
Покажем на плане звена все действующие
на него нагрузки и инерционные (см. рис.
3.9).
.
Покажем на плане звена все действующие
на него нагрузки и инерционные (см. рис.
3.9).
![]() -
сила тяжести звена.
-
сила тяжести звена.
![]()
![]() так как
так как![]() .
.
![]() .
.
Для определения Му составляем уравнение моментов относительно точки А
![]() ,
,
![]() .
.
Из полученного уравнения определяем Му – уравновешивающий момент:
![]() .
.
Для определения
силы реакции
![]() составляем
уравнение равновесия кривошипа.
составляем
уравнение равновесия кривошипа.
![]()
![]() .
.
С учётом масштабного
коэффициента
![]() строим план сил, действующих на первое
звено (рис.3.10)
. Решение уравнения геометрической
суммы сил даёт определение полной
реакции
строим план сил, действующих на первое
звено (рис.3.10)
. Решение уравнения геометрической
суммы сил даёт определение полной
реакции
![]() в
шарнире A.
в
шарнире A.
Рисунок 3.10 – План сил, действующих на звено 1 и его сил инерции