

10.6.5 Режим "выключено" ("off")
При установке переключателя режимов на MSU в положение "ОFF" из другого положения вычислитель системы продолжает работать в течение 10 с, а затем выключается. При этом сохраняется информация о координатах самолета в момент выключения системы, которые будут использоваться для сравнения с вновь введенными координатами при следующем включении системы в режим "Выставка".
10.6Контроль работоспособности
ИНС имеет встроенные средства контроля (ВСК) которые обеспечивают непрерывный контроль исправности блоков IRU в части касающейся вычисления инерциальных параметров, а также достоверности выходной информации. Информация о состоянии ИНС поступает в системы КИСС, ВСС, ССЛО.
При отказе какого-либо канула ИНС соответствующая информация выдается в систему КИСС, которая формирует сообщение, индицируемое на кадре "ДВ ОСН" (компактном) в виде текста желтого цвета (ИНС1", "ИНС2", "ИНСЗ"), сообщение сопровождается загоранием ЦСО и выдачей двукового сигнала "ГОНГ".
Текущее состояние ИНС может быть и рассмотрено на экране ПУИ ВСС в режиме "ДАННЫЕ А" (страницы "СОСТОЯНИЕ 2/5"). Информация о состоянии блоков ИНС и также линий связи ИНС с другими системами регистрируется системой ССЛО.
10.7 Электропитание системы ltn-101
Система LTN-101 получает электропитание от источников переменного тока напряжением 115В частотой 400 Гц (основное питание) и источников постоянного тока напряжением 27 В (резервное питание). Схема электропитания система LTN-101 представлениа на рисунке 10.24.
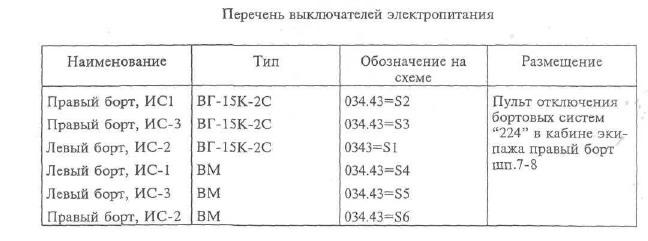
Для обеспечения надежности работы системы по электропитанию каждый блок питается от разных распределительные устройств и шин. при этом основное и резервное питание каждого блока осуществляется от разных бортов. Кроме того, питание постоянным током ИНС1 производится от аварийной шины, к которой подключены бортовые аккумуляторы. Блягод,1ря такому подключению ИНС1 остается работоспособной при отказе; всех генераторов. В каждой цепи питания системы на РУ и ЦРУ установлены автоматы защиты кнопочного типа, которые всегда должны быть включены (нажаты), а так^ке выключатели на пульте отключения бортовых систем "224". Это выключагели позцоляют выключать и включать блоки ИНС во время технического обслуживания. Перед вылетом эти выключатели должны быть включены, по окончании полета - выключены. Перечень выключателей электро питания представлен в таблице 3.
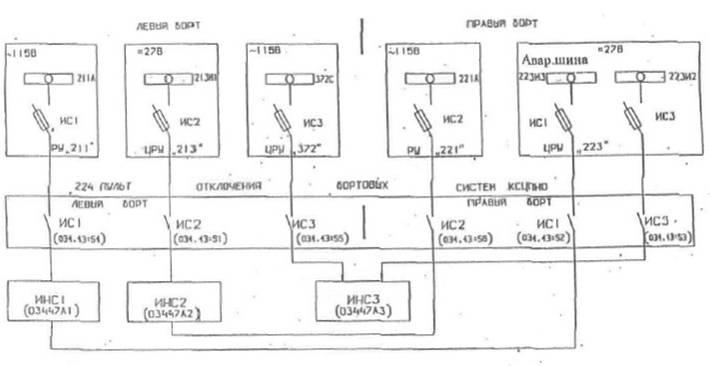
Рис 10.24 Схема электропитания система LTN-101
Таблица 3.
10.8 Отыскание к устранение неисправностей
1. Общие рекомендации по отысканию и устранению неисправностей систем, входящих в КСЦПНО, указаны в таблице 4.
2. Отыскание неисправностей в системе ИНС и линиях связи осуществляется при проверке всего комплекса КСЦГТНО с помощью ССЛО.
3. Выставка и проверка работоспособности системы ИНС осуществляется с помощью системы ВСС- При этом необходимо использовать режимы (страницы) ВСС: "ПОДГОТОВКА", "ДАННЫЕ", "СОСТОЯНИЕ".
4. Устранение неисправностей в системе ИНС осуществляется путем замены блоков И/или восстановлением нарушением в линиях связи.
5. После устранения неисправностей в системе, необходимо произвести проверку работоспособности ИНС и всего комплекса КСЦПНО с помощью ССЛО.
Таблица 4.

Приложение 1

















1В дальнейшем эти системы будем называть системами типа СВС-ПН