

9.3. Гироиндукционный компас типа гик-1.
Гироиндукционный компас (рис. 9. 4) представляет собой курсовую систему, соединяющую в себе два датчика курса; индукционный магнитный датчик и курсовой гироскоп.
В ГИК-1 можно выделить три следящие системы, с помощью которых осуществляются функциональные связи в системе:
Следящая система индукционный датчик — коррекционный механизм (ИД-КМ), предназначена для преобразования электрического сигнала, снимаемого с индукционного датчика, в механическую величину.
Следящая система коррекционный механизм — гироагрегат (КМ-ГА), предназначена для коррекции гироагрегата от индукционного датчика, фильтрации и сглаживания высокочастотных погрешностей индукционного датчика и для компенсации уходов гироскопа.
3. Следящая система гироагрегат — указатель (ГА-УШ), предназначена для дистанционной передачи курса, вырабатываемого на гироагрегате.
Рассмотрим работу указанных следящих систем.
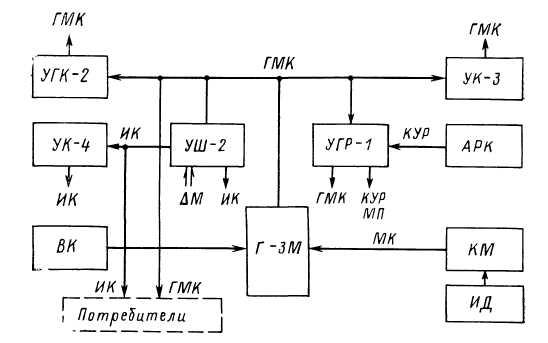
Рис. 9.4. Функциональная схема ГИК-1:
ИД-индукционный датчик; КМ—коррекционный механизм Г-ЗМ—курсовой гироскоп; ВК—выключатель коррекции; АРК— автоматический радиокомпас; УШ-2, УГР-1, УГК-2, УК-4, УК-3—указатели; ГМК—гиромагнитный курс; КУР—курсовой угол радиостанции; МП—магнитный пеленг радиостанции; МК—магнитный курс; ИК—истинный курс; AM—магнитное склонение
9.3.1. Следящая система «индукционный датчик-коррекционный механизм».
В этой следящей системе индукционный датчик служит для определения магнитного курса. Рассмотрим его работу.
Пусть два пермаллоевых стержня (рис. 9.5) параллельны друг другу, имеют свою первичную обмотку, питающуюся переменным напряжением U1. Обмотки намотаны таким образом, что магнитные потоки F1 иF2b первом и во втором стержнях в каждый момент равны по величине и противоположны по направлению. Следовательно, в каждый момент времени суммарный магнитный поток от двух первичных обмоток равен нулю, и он не может индуцировать ЭДС во вторичной обмотке, охватывающей оба стержня.
Рассмотрим процессы, происходящие в магнитном зонде (так называют систему, изображенную на рис. 9.5), если учесть, что он находится в магнитном поле Земли, причем оба сердечника лежат в горизонтальной плоскости.
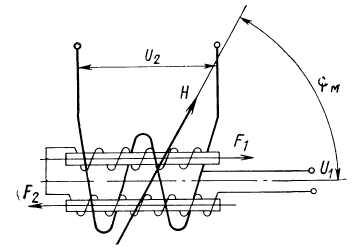
Рис. 9.5. Магнитный зонд
На графике (рис. 9. 6, а) показано изменение во времени напряжения U1, которым питаются первичные обмотки магнитного зонда.
Если напряжение U1 достаточно велико, то магнитная индукция В в пермаллоевых стержнях при прохождении тока в первичных обмотках в некоторый момент перестанет возрастать, т. е. имеет место насыщение (рис. 9. 6, б).
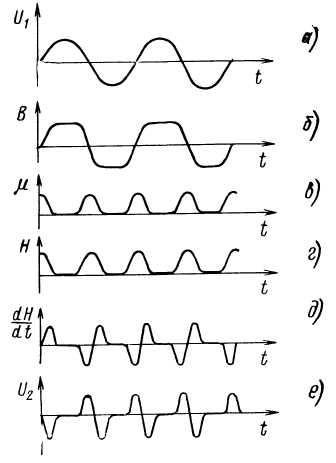
Рис. 9.6. К пояснению работы индукционного магнитного датчика
Соответственно повышению индукции падает магнитная проницаемость μ (рис. 9.6, в). Когда индукция достигнет экстремума, магнитная проницаемость будет равна нулю, и наоборот, когда ток в первичной обмотке будет равен нулю, магнитная проницаемость достигнет максимума.
Горизонтальная составляющая Н магнитного поля Земли сможет проникать в пермаллоевые сердечники только в моменты, когда магнитная проницаемость μ больше нуля. Следовательно, напряженность магнитного
поля Земли меняется во времени, так как показано на рис. 9.6, г. Как видно из рис. 9.6, г, магнитное поле Земли из постоянного поля превратилось в пульсирующее определенного направления.
Поскольку магнитное поле Земли изменяется в стержнях от нуля до какого-то максимального значения, можно представить скорость изменения магнитного потока Земли во времени (рис. 9. 6, д).
Следовательно, переменный (пульсирующий) магнитный поток создаст во вторичной обмотке переменный ток, напряжение которого
![]() (9.9)
(9.9)
где U2 — напряжение, В; W— количество витков во вторичной обмотке; Н1 — проекция горизонтальной составляющей магнитного поля Земли на ось симметрии магнитного зонда.
Нетрудно заметить, что частота напряжения U2 в два раза больше, чем частота напряжения U1 (рис. 9. 6, е).
Величина выходного напряжения U2 зависит от направления горизонтальной составляющей магнитного поля Земли относительно магнитного зонда. Очевидно, напряжение U2 будет максимальным, если направление горизонтальной составляющей Н совпадает с осью симметрии магнитного зонда, т. е.
![]() (9.10)
(9.10)
где φм — угол между Н и осью симметрии зонда.
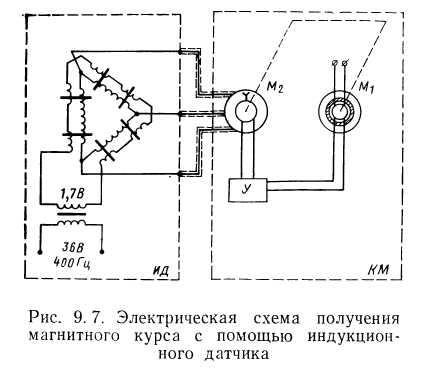
Рис. 9.7. Электрическая схема получения магнитного курса с помощью индукционного датчика
Казалось бы, что из уравнения (9. 10) можно определить магнитный курс φм, но, к сожалению, величина горизонтальной составляющей магнитного поля Земли зависит от географической широты места, и напряжение U2 оказывается функцией двух переменных: широты места и направления магнитного поля Земли.
Поэтому в курсовых системах, в частности, в ГИК-1, применяют компенсационный способ измерения, не зависящий от величины напряженности магнитного поля Земли и определяющий только его направление.
На рис. 9. 7 представлена электрическая схема такого измерителя.
Вместо одного магнитного зонда в схеме используются три> расположенные в пространстве относительно друг друга под углом 120°. Вторичные обмотки включены по схеме треугольника, вершины которого соединяются с тремя статорными обмотками сельсина-приемника М2. Сельсин-приемник расположен в специальном блоке, называемом коррекционным механизмом (КМ). Первичные обмотки магнитного зонда питаются током с напряжением 1,7 В и частотой 400 Гц.
Магнитное поле Земли будет наводить в зондах датчика не одинаковые ЭДС, а в соответствии с их пространственной ориентацией. Поэтому потенциалы на статорных обмотках сельсина зависят от направления горизонтальной составляющей магнитного поля Земли. Результирующее магнитное поле, создаваемое статорными обмотками сельсина, будет соответствовать направлению горизонтальной составляющей магнитного поля Земли.
С роторной обмотки сельсина М2 сигнал поступает на усилитель, а с него — на двигатель М1 поворачивающий роторную обмотку в положение, при котором напряжение на ней равно нулю.
Таким образом, рассмотренная схема следящей системы ИД-КМ преобразует сигнал, поступающий с индукционного датчика ИД, в угол поворота ротора двигателя, пропорциональный магнитному курсу.
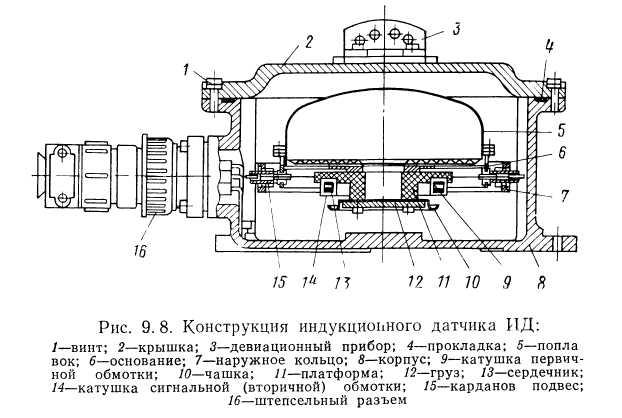
Рис. 9.8. Конструкция индукционного датчика ИД:
1 – винт; 2 – крышка; 3 – девиационный прибор; 4 – прокладка; 5 – поплавок; 6 – основание; 7 – наружное кольцо; 8 – корпус; 9 – катушка первичной обмотки; 10 – чашка; 11 – платформа; 12 – груз; 13 – сердечник; 14 – катушка сигнальной (вторичной) обмотки; 15 – карданов подвес; 16 – штепсельный разъем.
В индукционном датчике (рис. 9. 8) магнитные зонды с жестко связанным с ними поплавком 5 помещаются в кардановом подвесе 15 корпуса прибора 8, заполненного жидкостью (лигроин и масло МВП). Жидкость, поплавок и карданов подвес обеспечивают примерную горизонтальность магнитных зондов при кренах самолета, уменьшая ошибки от вертикальной составляющей магнитного поля Земли.
Для компенсации полукруговой девиации служит девиационный прибор 3, расположенный на крышке 2 датчика.
Следует отметить, что индукционный датчик — более совершенный магнитный измеритель, чем КИ-13, поскольку он обладает большей чувствительностью, в нем отсутствуют ошибки от увлечения и застоя, а вместе с коррекционным механизмом имеется возможность устранения четвертной магнитной девиации.
Коррекционный механизм преобразует электрический сигнал индукционного датчика в угол поворота вала двигателя, связывает индукционный датчик с курсовым гироскопом, устраняет четвертную девиацию с одновременной компенсацией погрешностей индукционного датчика и следящей системы ИД-КМ.
Компенсация четвертной девиации и инструментальных погрешностей осуществляется в коррекционном механизме специальным электромеханическим коррекционным устройством лекального типа, называемым лекальным корректором (рис. 9.9). Рассмотрим его работу.
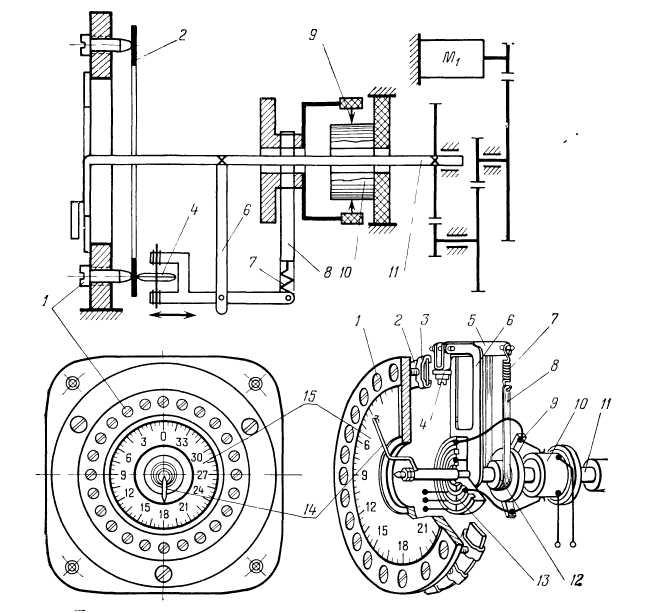
Рис. 9. 9. Кинематическая схема лекального корректора и внешний вид коррекционного механизма:
1—регулировочный винт; 2—профильная лента; 3—скоба; 4—ролик; 5—вилка; 6—рычаг; 7—пружина; 8—лента; 9—щеткодержатель; 10—потенциометр; 11—ось; 12—муфта; 13—коллектор; 14—стрелка; 15—шкала
Двигатель M1, приводящий ротор сельсина-приемника М2 в согласованное положение, должен перемещать и щетки 9 потенциометра 10. Ротор двигателя соединен со щетками потенциометра не жестко, а через специальный лекальный механизм, который состоит из гибкой металлической ленты 2 и ролика 4, находящегося в контакте с лентой. Ролик 4 укреплен на рычаге 6, жестко связанном с валом двигателя Mi. Таким образом, при перемещении ролика (что показано стрелкой на рис. 9. 9) с помощью гибкой ленты 8 и пружины 7 поворачиваются щетки 9 потенциометра 10 на некоторый угол. Таким образом, поворот щеток потенциометра складывается из суммы двух движений: от двигателя M1 (основное движение) и дополнительно — за счет перемещения ролика. Ролик 4 с рычагом 6 совершает движение вместе с осью 11. Ввиду того, что гибкая лента 2 может иметь сложный профиль, который создается поджатием двадцати четырех регулировочных винтов 1, угол поворота щеток потенциометра в определенных положениях корректируется.
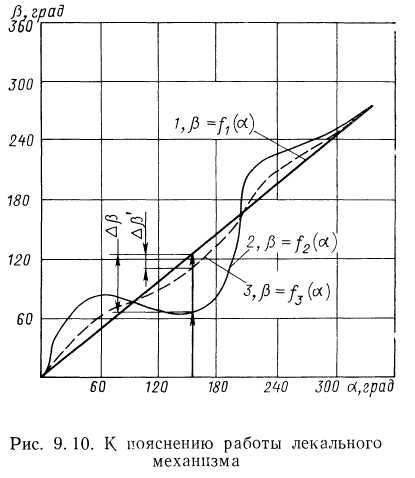
Рис. 9.10. К пояснению работы лекального механизма
Например, пусть α — угол поворота оси 11, пропорциональный повороту вала двигателя, β — угол поворота щеток потенциометра, а прямая 1 — желаемая зависимость β = f( α) (рис. 9.10). Тогда, если β меняется от изменения α в соответствии с кривой 2, а винты лекального механизма при этом не поджимают гибкую ленту, то поджатием винтов и изменением профиля ленты можно добиться изменения β от а в соответствии с кривой 3. Как видно из рисунка, ошибка ∆β при этом существенно уменьшается и становится равной ∆β`:
![]() (9.11)
(9.11)
Следует отметить, что стрелка 14 (см. рис. 9. 9) коррекционного механизма связана с осью 11 и, следовательно, показывает неисправленный курс β = f( α), т. е. компасный курс индукционного датчика.