

9.20.6 Основные технические данныеГмк-1г
Температурный диапазон работы системы, °С -60÷+50 Высота, до которой система может быть использована, км 25
Собственный уход гироскопа за 1 ч, град:
в нормальных условиях ±2,5
при температурах от—60 до +50° С ±3,5
Погрешность выдачи сигналов гиромагнитного курса без учета собственных погрешностей указателей, град ±1,5
Количество внешних потребителей (сельсинов) не более 5
Скорость согласования:
нормальная (малая), град/мин 1,5±7
большая, град/с не менее 6
большая от курсозадатчика, град/с не менее 2
Время готовности в режимах, не более, мин:
МК и АК 3
ГПК 5
Источник питания:
трехфазного тока, В 36±10%;400 Гц±2%
однофазного тока (при наличии указателя УГР-4УК),В 45+10%;400 Гц±2%
постоянного тока, В 27±10%
Потребляемая мощность:
постоянного тока, Вт 25 (ГМК-1 А)50(ГМК-1Г)
переменного тока, ВА 60(ГМК-1А)130(ГМК-1Г)
Масса, кг:
ГМК-1Г 13
ГМК-1А 10
Перед полетом курсовая система проверяется на функционирование с помощью переключателя «Контроль». Кроме того, следует помнить, что при проверке с помощью рукоятки «Контроль» при установке ее в положение «0» и «300» должны гореть лампы «Завал ГА», что свидетельствует об исправности системы сигнализации завалов гироагрегата.
Для удобства пользования системой в табл. 9.5 сведены данные об индицируемых курсах при различных режимах работы системы.
Таблица 9.5
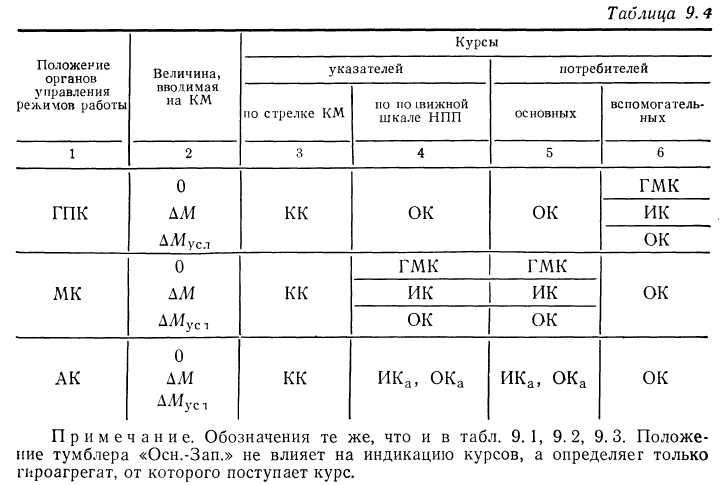
Примечание. Обозначения те же, что и в таблице 9.1, 9.2, 9.3. Положение тумблера «Осн.-Зап» не влияет на индикацию курсов. А определяет только гироагрегат, от которого поступает курс.
Инерциальные системы навигации
10.1.Принцип работы инерциальных систем
По способу определения местоположения движущегося объекта инерциальные системы навигации относятся к системам счисления пути. Счисление пути в них производится двойным интегрированием ускорений, испытываемых движущимся объектом за время движения.
Измерителями ускорений являются специальные устройства, называемые акселерометрами.
Принцип работы инерциальных систем известен довольно давно, однако приемлемые для практики системы появились только в пятидесятые годы нашего столетия, поскольку точность работы инерциальных систем зависит от точности элементов ее составляющих: акселерометров, гироскопов, счетно-решающих устройств и т. д.
Инерциальные системы навигации полностью автономны и помехоустойчивы. Их работа не зависит ни от работы радиотехнических средств, ни от магнитного поля Земли, ни от атмосферных условий и других факторов, что естественно полностью удовлетворяет требованиям безопасности полетов.
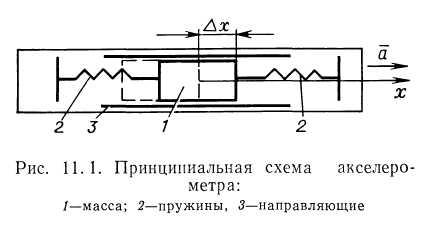
Рис. 10.1. Принципиальная схема акселерометра:
1– масса; 2 – пружины; 3 – направляющие
Основным чувствительным элементом инерциальной системы является акселерометр. Известно большое количество различных конструкций акселерометров для измерения линейных и угловых ускорений, но в каждом из них имеется некоторая масса и измерение ускорения сводится либо к измерению перемещения этой массы под действием ускорения, либо к измерению сил, действующих на эту массу.
Простейший акселерометр для измерения линейных ускорений представляет собой массу 1 (рис. 10.1), связанную с корпусом прибора пружинами 2. Масса 1 может перемещаться относительно корпуса прибора по направляющим 3 вдоль оси измерения или оси чувствительности х. Корпус прибора жестко крепится на объекте (самолете).
Если самолет находится в покое или движется с постоянной скоростью в направлении оси чувствительности, то масса 1 не перемещается по направляющим, поскольку отсутствуют силы, растягивающие пружины. При движении самолета по направлению оси х с ускорением а масса 1 в силу своей инерционности будет отставать от движения самолета, так как согласно второму закону Ньютона на нее будет действовать инерционная сила:
F = ma, (10.1)
где т — масса чувствительного элемента; а — ускорение.
Эта сила и вызывает перемещение массы в сторону, противоположную действию ускорения. Движение массы будет продолжаться до тех пор, пока сила противодействия пружин Fпр не уравновесит инерционную силу, следовательно, имеет место уравнение
F = Fпр (10.2)
Поскольку противодействующая сила пружины зависит от жесткости пружины и величины ее растяжения, то
Fпр = с∆х, (10.3)
где с — удельная жесткость пружины; ∆х — перемещение чувствительной массы. Таким образом, исходя из выражений (10.2) и (10.3),
∆х = ma/c. (10.4)
Поскольку масса и жесткость пружины в приборе постоянны, то перемещение массы является мерой действующего ускорения.
Следует заметить, что акселерометр не измеряет ускорения силы тяжести, вызванного гравитационной силой, так как поле тяготения в одинаковой степени воздействует как на чувствительную массу, так и на самолет. Акселерометр, будучи установленный на тело, свободно падающее в безвоздушном пространстве, будет иметь нулевые показания.
Таким образом, инерциальная система навигации путем двойного интегрирования ускорения самолета осуществляет определение пройденного пути. Для определения местоположения самолета в любой момент времени необходимо также знать и направление движения его, т. е. измерительная ось акселерометра должна быть определенным образом ориентирована относительно вектора путевой скорости самолета в горизонтальной плоскости.
В то же время акселерометр должен измерять только горизонтальные ускорения самолета, для чего его измерительная ось должна быть определенным образом ориентирована и в горизонтальной плоскости, причем требования к такой ориентации весьма жесткие.
Для построения инерциальной системы навигации необходимо акселерометры ориентировать относительно плоскости горизонта с большой точностью и стабилизировать их в этом положении во время полета в условиях непрерывных возмущений.
Как известно, для стабилизации каких-либо устройств в горизонтальной плоскости на движущемся объекте используются гироскопические вертикали с маятниковой коррекцией. Однако такие вертикали, например ЦГВ-4, не обладают необходимой точностью построения и выдерживания направления вертикали, так как подвержены влиянию ускорений объекта.
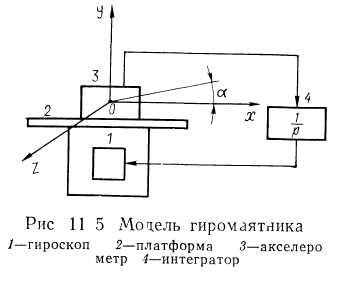
Рис. 10.2. Модель гиромаятника:
1 – гироскоп; 2 – платформа; 3 – акселерометр; 4 - интегратор
В 1923 г. немецкий ученый Макс Шулер теоретически показал, что физический маятник, длина которого равен радиусу Земли, а период колебаний при этом равен 84,4 мин, является невозмущаемым, т. е. не при каких ускорениях точки подвеса его плечо не отклоняется от направления вертикали места на Земле Естественно, что построить такой маятник не представляется возможные, но его можно моделировать. В 1932 г. советские ученые Е. Б. Левенталь и Л. М Кофман, предложили модель маятника с периодом колебаний 84,4 мин. Модель маятника представляет собой гироскоп 1 с вертикальным кинетическим моментом (рис. 10.2). На платформе 2, стабилизируемой гироскопом 1, установлен акселерометр 3, измеряющий ускорения платформы. Сигнал, снимаемый с акселерометра, интегрируется в интеграторе 4 и поступает на датчик момент гироскопа, располагаемый на оси гироскопа параллельной оси измерения ускорений, заставляя гироскоп прецессировать.
Рассматриваемая механическая система, состоящая из акселерометра, интегратора и гироскопа, не будет реагировать на внешние ускорения
Выше была рассмотрена плоская модель невозмущаемого маятника (гировертикали). Для построения пространственной вертикали необходимо установить на платформу еще один акселерометр, ось чувствительности которого будет направлена по оси Oz; проинтегрировав ускорения, замеренные вторым акселерометром, заставить прецессировать еще один гироскоп вокруг оси Oz.
Таким образом возможно построение прецизионной гироскопической вертикали, не возмущаемой ускорениями, которая сможет удовлетворить требованиям к стабилизации в плоскости горизонта акселерометров инерциальной системы навигации.