

9.3.2. Следящая система «коррекционный механизм-гироагрегат»
Система служит для выработки гиромагнитного курса, который отличается от магнитного своей стабильностью благодаря фильтрации и сглаживанию высокочастотных помех индукционного датчика. Гиромагнитный курс иногда называют «осредненным» магнитным курсом.
Следящую систему (рис. 9.11) образуют два потенциометра: потенциометр-датчик ПД, расположенный в гироагрегате и жестко связанный с внешней осью карданова подвеса гироскопа, и потенциометр-приемник ПП, находящийся в коррекционном механизме.
Щетки потенциометра ПП поворачиваются двигателем M1 через лекальный корректор ЛК, а щетки потенциометра ПД — двигателем М3 через редуктор Р. Передаточное отношение редуктора может изменяться с 1:828000 на 1:3150 электромагнитной фрикционной муфтой ЭМ, которая управляется кнопкой быстрого согласования 5КС Передаточному отношению редуктора 1:828000 соответствует скорость отработки щеток потенциометра 1,5-4,5 град/мин, а отношению 1:3150 — скорость 10 град/с.
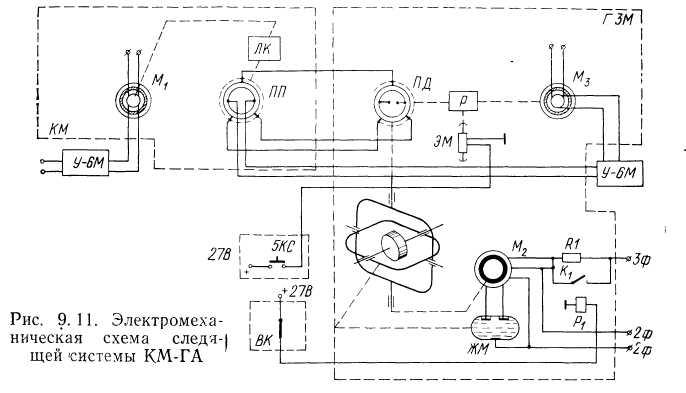
Малая скорость отработки обеспечивает фильтрующие свойства системы, большая скорость служит для уничтожения больших рассогласований. Большие рассогласования в системе могут быть при включении системы или после отключения коррекции от индукционного датчика на вираже. Отключение горизонтальной коррекции осуществляется контактом K1 реле Р1 которое управляется выключателем коррекции ВК.
Курсовым гироскопом в ГИК-1 служит гироагрегат Г-ЗМ, в котором применен гиромотор с кинетическим моментом 0,4 н*м*с.
Гироагрегат представляет собой гироскоп с тремя степенями свободы, внешняя ось карданова подвеса которого установлена на самолете в вертикальном положении. Горизонтальность оси собственного вращения осуществляется с помощью жидкостного маятника ЖМ, управляющего моментом коррекционного двигателя М2, ротор которого жестко связан с внешней осью карданова подвеса гироскопа.
В отличие от ГПК-52 в гироагрегате азимутальной коррекции нет, поскольку гироскоп используется только как элемент электромеханической сглаживающей системы и кратковременной пространственной памяти. Нет в гироагрегате никаких устройств и для компенсации кардановой ошибки. Поэтому кардановая погрешность бывает при развороте с креном и отключенной коррекции от индукционного датчика.
Гироагрегат герметизирован резиновой прокладкой и заполнен азотом.
9.3.3. Следящая система «гироагрегат-указатель»
Таких следящих систем может быть несколько в зависимости от комплектации.
Следящая система ГА-УГР-1 предназначена для передачи гиромагнитного курса от гироагрегата на указатель типа УГР-1. Указатель, кроме гиромагнитного курса, может индицировать курсовые углы и магнитные пеленги радиостанции при совместной работе ГИК-1 с автоматическим радиокомпасом.
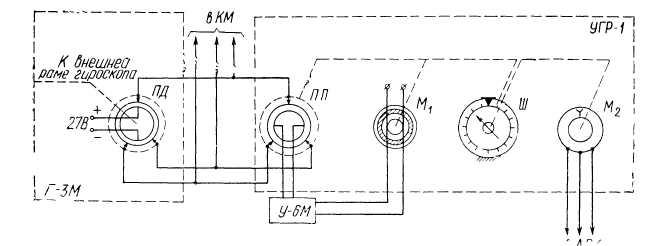
Рис. 9. 12,. Электромеханическая схема следящей системы ГА УГР-1:
ПД—потенциометр-датчик; ПП—потенциометр-приемник; M1—двигатель; М2—-
сельсин-приемник АРК; Ш—шкальное устройство
Следящая система ГА-УГР-1 представлена на рис. 9. 12. Как видно из схемы (рис. 9. 12), это обычная трехпроводная потенцио-метрическая следящая система, скорость отработки которой выбирается таким образом, чтобы обеспечить качественное слежение за разворотами самолета по курсу. Двигатель M1 следящей системы связан с подвижной шкалой (рис. 9.13), положение которой относительно неподвижного индекса определяет отсчет гиромагнитного курса.
В указателе УГР-1 (см. рис. 9.12) имеется сельсин-приемник М2 от следящей системы АРК-УГР-1, работающей в индикаторном режиме. С ротором сельсина-приемника связана стрелка 1, которая показывает по неподвижной шкале курсовой угол радиостанции, а по подвижной шкале — магнитный пеленг радиостанции. Для удобства пользования прибором в УГР-1 (см. рис. 9. 13) имеется курсозадатчик 2, который может поворачиваться с помощью кремальеры 3.
Кроме указателя УГР-1, в комплект ГИК-1 может входить указатель УШ-2, который предназначен для индикации либо гиромагнитного, либо истинного курса, если введено магнитное склонение. Электрическая схема следящей системы ГА-УШ-2 изображена на рис. 9.14. С двигателем M1 указателя штурмана УШ-2, связана стрелка 1 (рис. 9.15), которая по шкале 2 показывает гиромагнитный курс при магнитном склонении ∆M = 0. Кремальера 3 механически связана со шкалой 2, индексом 4 и потенциометром ПД2, служащим для передачи курса в указатели типа УК.

Рис. 9.13. лицевая сторона указателя УГР-1:
1 – стрелка; 2 – курсозадатчик; 3 – кремальера.
Кремальерой 3 по шкале «Склонение» устанавливают магнитное склонение ∆M, при этом поворачивается шкала УШ-2. По стрелке 1 и шкале прибора можно отсчитывать истинный курс.
Комплект ГИК-1 может содержать указатели УК-3, УК-4, УГК-2, работающие по одному принципу и отличающиеся только конструктивными особенностями.
По принципу действия все эти указатели трехкатушечные логометры с подвижным ротором в виде постоянного магнита.
Трехкатушечный логометр представляет собой устройство, состоящее из статора, на который намотаны три катушки. Электрические оси катушек расположены относительно друг друга под углом 120°, ротором является постоянный магнит. Катушки питаются постоянным током, и каждая из них создает магнитное поле, направление и напряженность которого зависит от напряжения на концах катушек.
Подвижный магнит устанавливается по результирующему магнитному полю трех катушек.
Электрическая схема связи указателей типа УК с указателем УШ-2 видна из рис. 9. 14. При развороте щеток потенциометра ПД2 в указателе УШ-2 развернется в ротор логометра УК-4.
Из кинематической схемы (рис. 9. 16) хорошо видно, что статор логометра вместе со шкалой может быть повернут с помощью кремальеры 1 и таким образом установлен заданный курс по индексу 2.
Если теперь самолет отклоняется от заданного курса, то силуэт самолета будет отклоняться относительно шкалы и индекса в ту же сторону. Такая индикация положения самолета по курсу удобна в полете.
Упрощенная электрическая схема ГИК-1 изображена на рис. 9. 17. Она состоит из схем следящих систем, рассмотренных выше.

Рис. 9.14. Электромеханические схемы следящих систем ГА-УШ-2 и УШ-2-УК: ПД1, ПД2—потенциометры-датчики; ПП—потенциометр-приемник; К—кремальера; ДМ—магнитное склонение; Ш—шкальное устройство
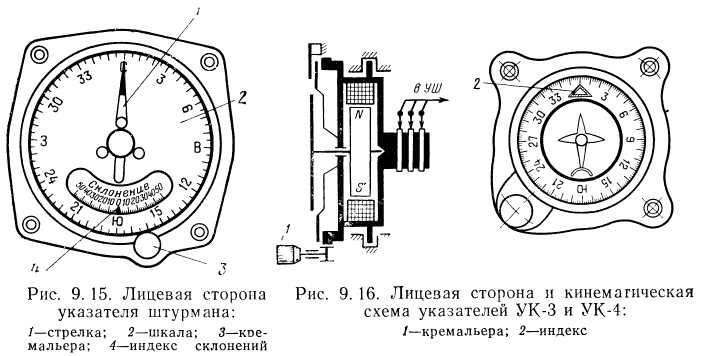
Рис. 9.15. лицевая сторона указателя штурмана:
1 – стрелка; 2 – шкала; 3 – кремальера; 4 – индекс склонений.
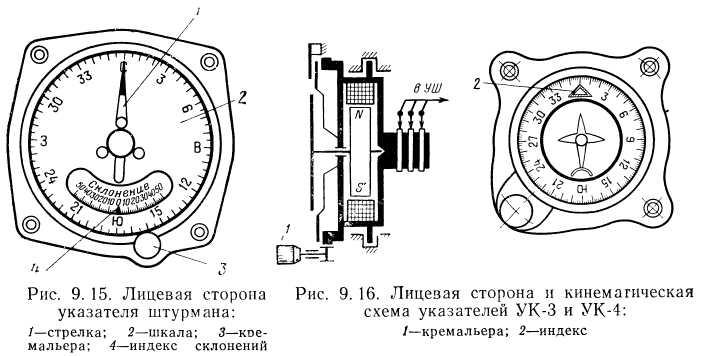
Рис. 9.16. лицевая сторона и кинематическая схема указателей УК-3 и УК-4:
1 – кремальера; 2 – индекс