

9.7.6 Блок дистанционной коррекции бдк-1
Блок дистанционной коррекции БДК-1 предназначен для ручного ввода поправки в сигнал текущего курса, поступающего в навигационный вычислитель НВУ-БЗ от курсовой системы ТКС-П2. Блок БДК-1 используется только в случае отсутствия возможности произвести коррекцию счисленных НВУ-БЗ координат самолета по данным системы РСБН-2СА. Для коррекции ортодромического курса нужно определить по карте линейное боковое уклонение ЛБУ как разность фактической и счисленной НВУ-Б3 боковой координаты и пройдена расстояние S затем вычислить поправку:
![]()
Поправка вводится с помощью кремальеры. Значение введенной поправки индицируется:
-малой стрелкой по шкале от 0 до ±170° с ценой деления 10°;
-большой стрелкой по шкале от 0 до ±10° с ценой деления2'.
9.7.7 Пульт управления пу-11
Пульт управления ПУ-11 предназначен для управления курсовой системой и сигнализации завалов гироагрегатспа(рис. 5.56).
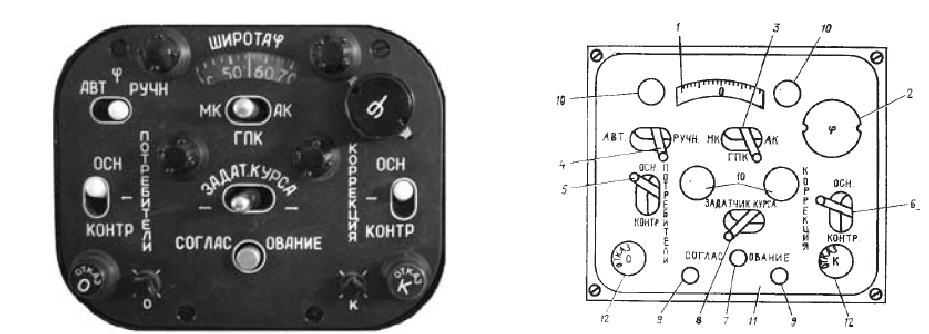
Рис. 9.56. Пульт управления ПУ-11. 1 – шкала широты; 2 – ручка ввода широты; 3 – переключатель режимов работы; 4 – переключатель ввода широты; 5 – переключатель «Потребители»; 6 – переключатель «Коррекция»; 7 – кнопка «Согласование»; 8 – переключатель работы системы в режиме курсозадатчика; 9 –крышки балансировочных потенциометров; 10 – лампы подсвета; 11 – панель;12 – лампы сигнализации отказа.
Пульт управления обеспечивает:
1. Выбор режима работы широтной коррекции гироагрегатов переключателем «АВТ—РУЧН». Положение «АВТ» не задействовано. В положении «РУЧН» сигнал широтной коррекции снимается с синусного потенциометра, связанного с рукояткой ввода широты <р и со шкалой с надписью «С—Ю» и делениями от 0 до ±90°.
2. Выбор режима работы переключателем «МК—ГПК—ак». Режим «АК» не задействован.
3. Переключение потребителей курса на основной или контрольный гироагрегат переключателем «ПОТРЕБИТЕЛИ».
4. Коммутирование прохождения сигналов коррекции в режимах МК и ГПК на основной или контрольный гироагрегат переключателем «КОРРЕКЦИЯ».
5. Выставку гироагрегатов в режиме ГПК нажимным переключателем «ЗАДАТЧ. КУРСА».
6. Включение большой скорости согласования гироагрегатов при работе системы в режиме МК кнопкой «СОГЛАСОВАНИЕ». В режиме ГПК эта кнопка подключена к блокам БГМК-2.
7. Сигнализацию завалов гироагрегатов светосигналнзаторами «ОТКАЗ О» и «ОТКАЗ К».
9.8 Функциональная схема ткс-п2
В полете переключатель режимов «МК—ГПК—АК» па пульте управления ПУ-11, как правило, находится в положении «ГПК», переключатель «ПОТРЕБИТЕЛИ»—в положении «ОСП», переключатель «КОРРЕКЦИЯ»—у положении «КОНТР». Выключатели «КОРРЕКЦИЯ БГМК-2 № 1 л № 2» на верхнем электрощитке пилотов включены.
Оба гироагрегата ГА-3 работают в режиме ГПК. Сигнал ортодромического курса от основного гнроагрегата ГА-3 подастся на стрелку «К» указателя УШ-3 и на блок БГМК-2 № 1. Сигнал гиромагнитного курса от БГМК-2 X" 1 подастся на ИКУ-1А второго пилота. На ПНП-1 первого пилота от БГМК-2 № 1 подается сигнал ортодромического или гиромагнитного курса в зависимости от положения переключателя «КУРС ПНП ЛЕВ» (рис. 9.57).
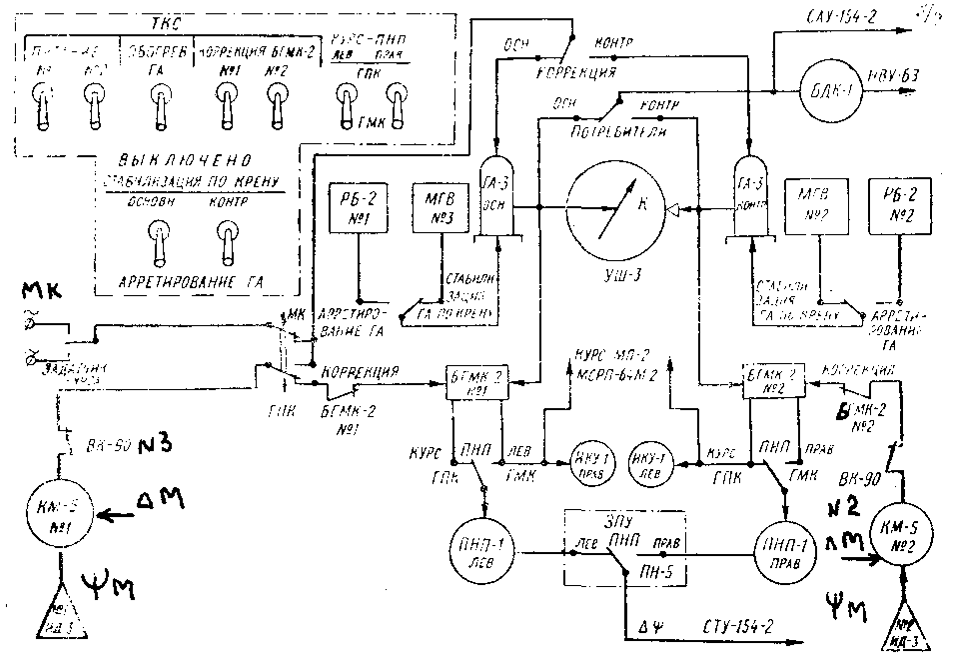
Рис. 9.57. Функциональная схема ТКС-П2
Сигнал ортодромического курса от контрольного гироагрегата ГА-3 подается на управление треугольным индексом указателя УШ-3 и на блок БГМК-2 № 2- Сигнал гиромагнитного курса от БГМК-2 № 2 подается на ИКУ-1А первого пилота. На ПНП-1 второго пилота подается сигнал ортодромического пли гиромагнитного курса в зависимости от положения переключателя «КУРС—ПНП ПРАВ».
В систему САУ-154-2 и через блок БДК-1 в НВУ-БЗ подастся ортодромический курс от основного или контрольного гпроагрегата ГА-3 в зависимости от положения переключателя «ПОТРЕБИТЕЛИ» па пульте управления ПУ-11.
Режим МК является вспомогательным и служит для первоначальной выставки гпроагрегатов по магнитному курсу. При этом основной и контрольный гироагрегаты ГА-3 по магнитному курсу выставляются по сигналам от ИД-3 № 1.
Выключатели «КОРРЕКЦИЯ» БГМК-2 № 1 и № 2» предназначены для отключения сигналов магнитного курса, подаваемых от ИД-3 на блоки БГМК-2. Данные выключатели необходимо выключать при:
-взлете н посадке, когда ИД-3 работает неустойчиво;
-полете на малой высоте над районами магнитных аномалий;
-сильной болтанке;
-включении противообледенителей предкрылков.
Для управления следящей рамой гироагрегаты получают сигналы крена от МГВ-1СК. При отказе МГВ-1СК № 3 или 2 необходимо переключатель на верхнем электрощитке пилотов для ГА-3 основного или контрольного из положения «СТАБИЛИЗ.ГА ПО КРЕНУ» переключить в положение «АРРЕТИРОВАНИЕ
ГА». При этом следящая рама гироагрегата арретируется по сигналу нулевого крена от распределительного блока РБ-2.