

Магнитные компасы
Задачи, которые приходится решать экипажам воздушных судов, подразделяются на две группы, тесно связанные между собой: 1) обеспечение стабилизации воздушного судна относительно центра масс — пилотирование; 2) вождение воздушного судна по заданной траектории из одной точки пространства в другую — навигация.
Для осуществления воздушной навигации необходимо непрерывно определять текущее положение воздушного судна в пространстве. Величины, характеризующие пространственное место воздушного судна и вектор его скорости в данный момент, называются навигационными элементами полета.
Курс воздушного судна — один из навигационных элементов полета. Под курсом воздушного судна в воздушной навигации понимают угол между положительным направлением меридиана и продольной осью воздушного судна, отсчитываемый по часовой стрелке.
В зависимости от логической схемы навигации и физико-технических средств, с помощью которых происходит определение курса, различают:
Магнитный курс (МК) — угол между северным направлением земного магнитного меридиана и продольной осью воздушного судна.
Истинный курс (ИК) — угол между направлением географического меридиана и продольной осью воздушного судна.
Условный курс — угол между направлением условного меридиана, т. е. любого заданного заранее направления на земной поверхности, и продольной осью воздушного судна.
7.1. Магнитные компасы
Магнитным компасом называется устройство, с помощью которого определяется направление магнитного меридиана. Магнитный компас, по-видимому, можно считать одним из первых навигационных приборов, применявшихся человеком. Имеются сведения, что еще за 2,5 тысячи лет до н. э. китайцам было известно свойство свободно подвешенного магнита указывать на Север. В Европе компас стали применять только в XI—XII вв.
В настоящее время магнитные компасы являются не основными навигационными приборами, однако благодаря одному очень важному достоинству — автономности — до сих пор используются в авиации в качестве резервных курсовых приборов.
Современный магнитный компас — это устройство, не требующее никакого электрического питания, имеет весьма небольшие размеры, масса не превышает 200 г.
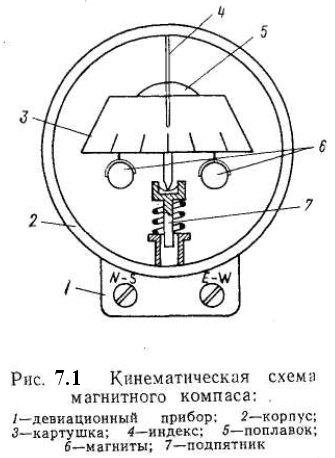
Рассмотрим принцип работы авиационного магнитного компаса. Компас (рис. 7.1) представляет собой пластмассовый сосуд 2 шарообразной формы, внутри которого находятся два постоянных магнита 6 с одинаково направленными полюсами. Магниты крепятся к поплавку 5, имеющему картушку (шкала) 3, и опираются на подпятник 7, представляющий собой подшипник. Подшипник крепится к корпусу с помощью пружины. Вертикальный неподвижный индекс 4 служит для отсчета показаний по шкале. Корпус прибора заполняется вязкой прозрачной жидкостью, удельный вес которой подбирается таким образом, чтобы вся подвижная система компаса обладала небольшой отрицательной плавучестью и оказывала минимальное давление на подшипник, уменьшая момент трения в нем. Кроме того, жидкость выполняет роль демпфирующей среды. Устройство 1 предназначено для устранения девиации компаса.
Магнитная система компаса, взаимодействуя с магнитным полем Земли, стремится занять направление, параллельное вектору 7 магнитного поля Земли. Поскольку магнитный компас должен определять направление горизонтальной составляющей Н магнитного поля Земли и его картушка не должна иметь наклонов, то «южный» конец картушки делают тяжелее. В результате создается момент, компенсирующий в какой-то степени момент, действующий от вертикальной составляющей магнитного поля Земли Z.
За счет сильных демпфирующих свойств показания компаса при рыскании самолета будут устойчивее. В то же время при разворотах самолета истинное значение компасного магнитного курса, индицируемое компасом, будет запаздывать по отношению к развороту самолета.
При проектировании магнитного компаса величины соотношение между вращающим моментом и моментом демпфирования, выбирают таким образом, чтобы время прихода к установившемуся значению было минимальным и система не обладалает большой колебательностью, иначе отсчет показаний компаса будет неудобным.