

9.20.2. Режим гирополукомпаса (гпк)
Режим гирополукомпаса — основной режим работы системы. Он задается установкой переключателя режимов работы в положение ГПК. Когда переключатель «Осн.-Зап» находится в положении «Основной», основной гироагрегат работает в режиме ГПК, а запасной — в режиме магнитной коррекции. Основные потребители курса подключаются к основному гироагрегату, вспомогательные— к запасному. Если переключатель режимов работы оставить в положении «ГПК», а переключатель «Осн.-Зап.» переключить в положение «Запасной», то запасной гироагрегат будет работать в режиме ГПК, а основной — в режиме МК. Потребители основные в этом случае подключены к запасному гироагрегату, а второстепенные — к основному.
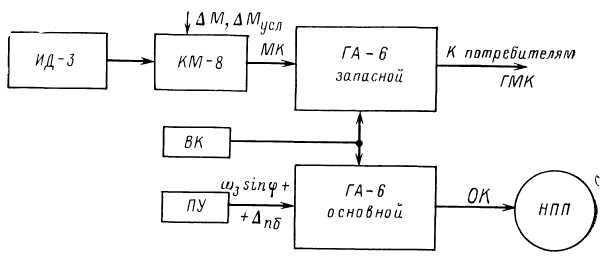
Рис. 9.70. Функциональная схема курсовой системы ГМК-1Г в режиме гирополукомпаса по линии основного и запасного гироагрегатов при установке переключателя «Осн.-Зап.» в положение «Основной»:
ИД-З—индукционный датчик; КМ-8—коррекционный механизм; ПУ—пульт управления; ВК — выключатель коррекции; ГМК — гиромагнитный курс; ОК—ортодромический курс; НПП—навигационно-пилотажный прибор; ∆M — магнитное склонение; ∆М усл—условное магнитное склонение; ГА-6— гироагрегат; МК—магнитный курс.
Рассмотрим работу курсовой системы ГМК-1Г в режиме гирополукомласа по линии основного и запасного гироагрегатов (рис. 9.70 и 9.71). Как видно из рис. 9.70 и 9.71, основной гироагрегат работает в режиме гирополукомпаса.
Удержание собственной оси вращения гироскопов гироагрегатов в горизонтальной плоскости производится с помощью горизонтальной коррекции, которая аналогична горизонтальной коррекции курсовой системы КС-6 и поэтому на рис. 9.71 не показана.
Азимутальная коррекция — моментная. Она состоит из коррекционного двигателя M1, на который поступает сигнал с широтного потенциометра П] и потенциометра небаланса П2 пульта управления. В системе азимутальной коррекции имеется схема термостабилизации (сопротивления R1 и R2), обеспечивающая компенсацию температурных ошибок системы. Моменты трения по внутренней оси карданова подвеса гироскопа и, следовательно, собственные уходы гироскопа в азимуте в ГА-6 уменьшаются благодаря использованию вращающихся подшипников такого же типа, как и в системе ТКС-П.
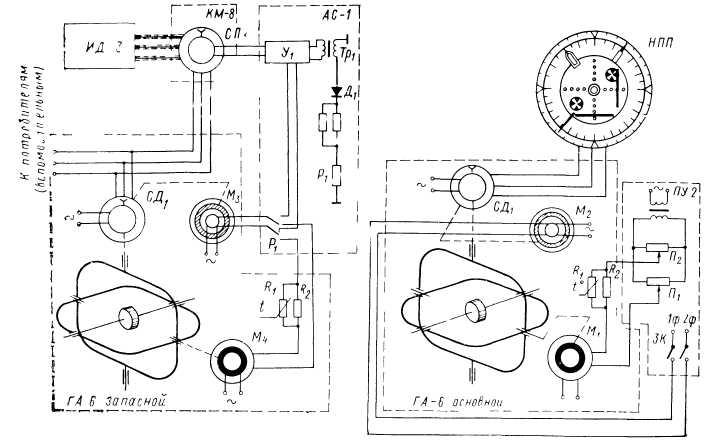
Рис. 9.71. Принципиальная электромеханическая схема курсовой системы ГМК-1Г в режиме гирополукомпаса по линии основного и запасного гироагрегатов при установке переключателя «Осн.-Зап.» в положение «Основной»
Применение вращающихся подшипников позволило при кинетическом моменте гироскопа в гироагрегате ГА-6, существенно меньшем, чем в курсовой системе ТКС-П, получить сравнительно небольшую скорость собственного ухода гироскопа в азимуте — 2,5 град/ч, при массе гироагрегата 3,5 кг (масса же ГА-3 системы ТКС-П составляет 12,5 кг).
В ГА-6 отсутствует дополнительная следящая рама для уничтожения кардановой ошибки, поэтому она в системе ГМК-1Г имеет место.
Выключатель коррекции в системе отключает горизонтальную коррекцию и компасы-корректоры: индукционный датчик и астрокомпас на виражах.
Ортодромический курс с сельсина СД1 основного гироагрегата поступает в навигационно-пилотажный прибор и индицируется на нем по подвижной внутренней шкале и неподвижному индексу.
Задатчиком курса ЗК с пульта управления можно установить любой курс на НПП, для этого тумблер ЗК нажимается вправо или влево, и двигатель М2 основного гироагрегата подключается к переменному напряжению и разворачивает статор сельсина СД1. Контроль устанавливаемого курса производится по шкале НПП. В то время, когда основной гироагрегат работает в режиме гирополукомпаса, запасной работает в режиме магнитной коррекции, и от него получает гиромагнитный курс вспомогательные потребители.
В этом случае действуют следящие системы ИД-3—КМ-8, КМ-8 — ГА-6 (запасной), ГА-6 — потребители вспомогательные.
Особенность следящей системы «коррекционный механизм — гироагрегат» в ГМК-1Г состоит в том, что согласование гироагрегатов осуществляется с двумя скоростями: большая скорость получается за счет следящей системы, состоящей из сельсина-датчика СПЬ коррекционного механизма, усилителя У1 автомата согласования и двигателя М3 гироагрегата. При рассогласовании больше 2° двигатель М3 разворачивает статор сельсина СД1 гироагрегата, осуществляя согласование положений сельсина СП1 и сельсина СД1. Если рассогласование будет меньше чем 2°, то напряжение, снимаемое со специального трансформатора Tp1 усилителя У1 будет таким, что реле Р1 включенное во вторичную обмотку этого трансформатора через диод Д1 сработает и своими контактами переключит выход усилителя У1 на коррекционный двигатель М4, расположенный на внутренней оси карданова подвеса гироскопа. В результате образуется следящая система с использованием прецессионного движения гироскопа. Скорость работы такой следящей системы будет 1,5 + 7 град/мин.
Вспомогательные потребители получают гиромагнитный курс от сельсина СД1 запасного гироагрегата.