

3.2. Требования, предъявляемые к конструкции гироскопических приборов
Как было показано в предыдущем разделе, гироскоп должен иметь. По возможности большой кинетический момент. Кинетический момент гироскопа — это произведение момента инерции ротора относительно оси вращения Iz на угловую скорость вращения H=IzΩ. Следовательно, можно увеличивать кинетический момент за счет увеличения момента инерции. Поскольку момент инерции тела вращения выражается форму
![]() (3.1)
(3.1)
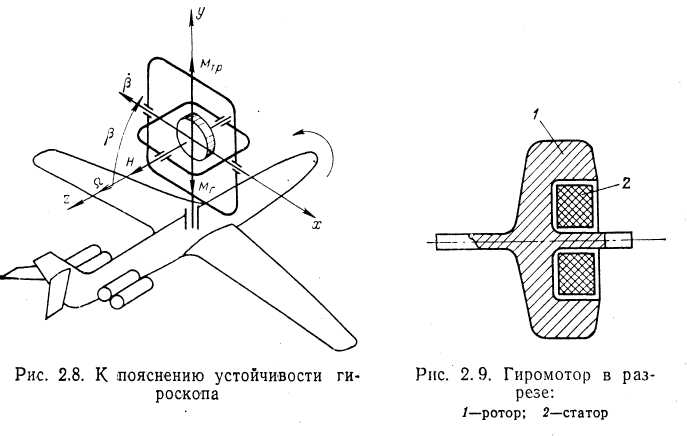
где т — масса тела; R — радиус, то выгодно массу ротора размещать по возможности на большем удалении от оси вращения. В связи с этим роторы гиромоторов имеют конфигурацию такую, как показано на рис. 3.3. Ротор гиромотора 1 одновременно является якорем асинхронного двигателя переменного тока; в якоре имеется беличье колесо. Статором же у такого двигателя является внутренняя обмотка 2.
 Рис
3.3 гиромотор в разрезе: 1-ротор, 2-статор.
Рис
3.3 гиромотор в разрезе: 1-ротор, 2-статор.
Конструкция ротора выбирается в основном из соображений максимального момента инерции и отсутствия деформаций ротора от действия центробежных сил, возникающих при вращении ротора.
Авиационные гиромоторы питаются трехфазным напряжением U= 36 В с частотой f = 400 Гц. Так как они являются асинхронными двигателями, обладающими скольжением, то обороты ротора гиромоторов п = 22000 ÷23000 об/мин. Существуют гиромоторы, имеющие существенно большие угловые скорости, но ввиду того, что ресурс работы подшипников таких гиромоторов обратно пропорционален угловой скорости ротора, в гражданской авиации их не применяют.
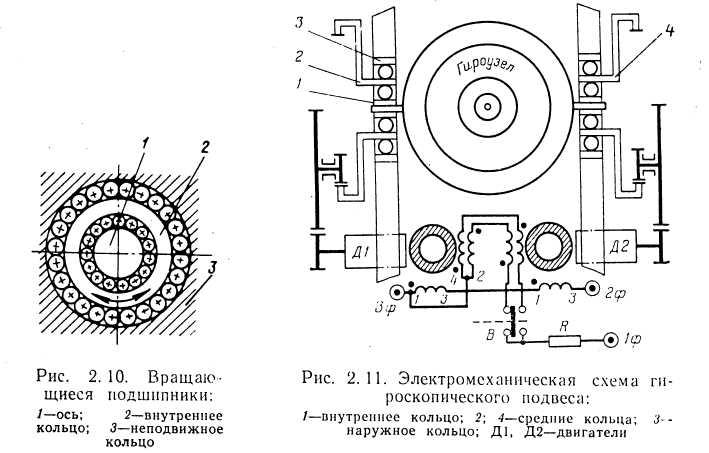
Рис 3.4 вращающиеся подшипники:
ось, 2-внутреннее кольцо, 3- неподвижное кольцо
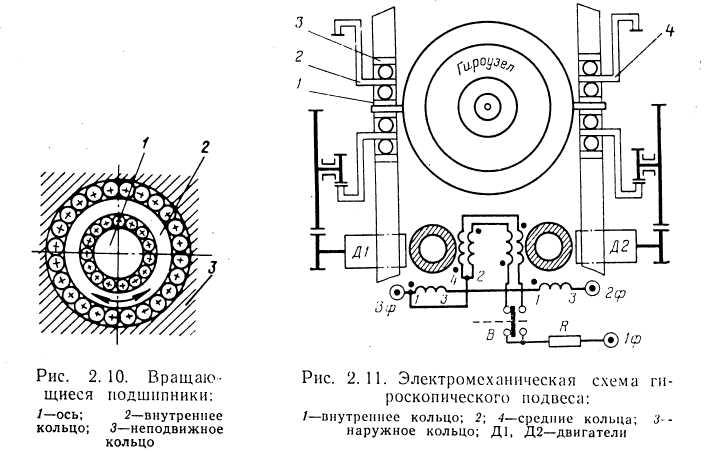
Рис 3.5 электромеханическая схема гироскопического подвеса
1- внутреннее кольцо, 2,4-средние кольца,4-наружное кольцо, Д1,Д2-двигатели
Поскольку способность гироскопа точно сохранять положение своей главной оси в пространстве зависит от величины моментов, действующих по осям его карданова подвеса, при конструировании гироскопов стараются свести эти моменты к минимуму.
В качестве опор для осей карданова подвеса гироскопа используют высокопрецизионные подшипники качения с малыми моментами трения.
Для особо точных приборов, например, гироскопов для курсовых систем, применяют так называемые вращающиеся подшипники с двумя рядами шариков, причем внутреннее кольцо 2 (рис. 3.4) совершает принудительное вращение относительно оси 1 и неподвижного кольца 3.
На принципиальную возможность уменьшения влияния трения в подобных устройствах указал Н. Е. Жуковский. Идея Н. Е. Жуковского сводилась к следующему: если имеется 100 натянутых ниток, на которых лежит какой-нибудь предмет, например, карандаш, то, перемещая все нити вправо, карандаш будет увлекаться ими за счет трения тоже вправо. Если перемещать нити влево, то и карандаш будет двигаться влево. Заставляя каждую четную нить двигаться вправо, а нечетную — влево, будем иметь карандаш неподвижным. Конечно, это при условии, что на каждую нить будет выпадать одинаковая доля массы карандаша и коэффициент трения контактных поверхностей карандаш — нить везде одинаков. В этом примере трение не исчезает, оно только взаимно компенсируется.
На рис. 3.5 представлена конструкция внутренней рамы карданопа подвеса (гироузла). Как видно из рисунка, внутренние кольца 2 и 4 левого и правого подшипников могут поворачиваться двигателями Д1 и Д2. Причем кольца вращаются с одинаковыми угловыми скоростями, но в противоположные стороны. Возникающие при этом силы трении воздействуют на внутреннюю ось гироскопа с помощью моментов, направления которых противоположны, поэтому их суммарная величина оказывается близкой к нулю, и вредное воздействие моментов трения ослабляется. Сели даже суммарная величина моментов трения заставляет гироскоп прецессировать с некоторой небольшой скоростью, то периодическим изменением направления вращения двигателей (с помощью переключателя В со специальным кулачком) можно менять направление действия этого момента, а следовательно, и направление прецессии, что, в конечном счете уменьшает прецессию гироскопа от моментов трения в осях карданова подвеса С помощью такой схемы удается уменьшить собственные «уходы» гироскопа в несколько раз по сравнению с обычными подшипниками качения.
Рис 3.6 действие на гироскоп силы тяжести.
Существуют гироскопы с аэродинамическими подшипниками по осям карданова подвеса. Такой подшипник представляет собой втулку и ось, между которыми имеется воздушный зазор и ось как бы «плавает» в воздухе. Такие подшипники тоже имеют весьма малые моменты трения, но в гражданской авиации в силу ряда причин пока не применяются.
Гироскоп должен быть тщательно сбалансирован, т. е. центр масс гиромотора должен совпадать с точкой пересечения осей карданова подвеса. В противном случае, как показано на рис. 3.6, на гироскоп действуют моменты от ускорения силы тяжести.
Следует заметить, что при эксплуатации авиационных гироскопических приборов необходимо строго выполнять правила технической и летной эксплуатации, так как от этого зависит точность их работы и долговечность. Необходимо также помнить, что гироскопические приборы являются приборами дорогостоящими.
3.3. Гироскопические асинхронные двигители
Гироскопический двигатель предназначен для разгона маховой массы за определенный промежуток времени до номинальной частоты вращения и для последующей ее стабилизации при минимальном потреблении энергии. В настоящее время широкое применение нашли электрические гироскопические двигатели и, в частности, асинхронные.
Асинхронный гироскопический двигатель (АГД) конструктивно объединен в одно целое с маховиком (рис.3.7). Для обеспечения при заданных габаритах и массе наибольшего кинетического момента
H = J , (3.2)
где J - момент инерции маховика относительно оси вращения; - угловая скорость, стремятся вращающуюся массу разместить на максимальном удалении от оси вращения. С этой целью применяют обращенную конструкцию асинхронного двигателя с внешним короткозамкнутым ротором 1 (рис.3.7) и с внутренним неподвижным статором 2 . Для повышения кинетического момента внешний ротор располагают внутри специальной втулки 3, к которой крепятся крышки 4, 5. Втулка выполняется из латуни или бериллия.
Повышение кинетического момента при заданной массе внешнего ротора связано также с максимальным повышением его угловой скорости (частоты вращения n). Частота вращения современных АГД лежит в пределах n = 15000 60000 об/мин при числе пар полюсов р = 1; 2. Иногда для повышения частоты вращения АГД его питание осуществляют от автономного источника с повышенной частотой f = 500 2000 Гц. Максимум частоты вращения АГД ограничен, как правило, качеством шарикоподшипников.
Отношение кинетического момента Н к массе АГД называют добротностью гироскопического двигателя. Ее повышение обеспечивается увеличением плотности материала частей конструкции, вращающихся на большом удалении от оси, и уменьшением ее для всех остальных элементов.
На валу АГД нет полезной нагрузки. Он работает в режиме холостого хода, преодолевая моменты трения внешнего ротора о газовую среду и трения в подшипниках, при нулевом к.п.д. Условным к.п.д. АГД принято считать отношение мощности механических потерь к полной потребляемой мощности, характеризующее совершенство асинхронного двигателя в электромагнитном отношении. Величина условного к.п.д. в зависимости от мощности, конструктивного исполнения и параметров АГД лежит в пределах = 0,2 0,9.

Рис. 3.7. Конструкция асинхронного гироскопического двигателя (АГД)
Для повышения стабильности частоты вращения при изменении плотности окружающей среди, связанной с изменением высоты полета летательного аппарата, номинальное скольжение АГД выбирают в пределах Sн = 0,015 0,12. В некоторых случаях с целью исключения влияния высоты полета на работу АГД его помешают в специальную газовую или вакуумную камеру. Снижение вентиляционных потерь достигается в АГД полировкой внешней поверхности ротора.
Улучшение характеристик АГД путем увеличения массы ротора с другой стороны приводит к увеличению длительности процесса его запуска, которая лежит в пределах от десятков секунд до десятков минут. Для обеспечения приемлемых пусковых характеристик при проектировании АГД стремятся добиться кратности пускового момента Mп / Mн > 1,5, кратности максимального момента (перегрузочной способности) MЭМ М / Mн = 2 5 и критического скольжения Sкр = 0,3 0,4. Под номинальным моментом АГД понимают суммарный момент его потерь в номинальном режиме.
Поскольку АГД работает с нагрузкой, близкой по своему характеру к вентиляционной, то в процессе запуска избыточный электромагнитный момент MЭМ меняется не существенно (рис. 3.8). При этом запуск происходит с практически постоянным ускорением. Для сокращения времени запуска иногда применяют запуск АГД при повышенном напряжении питания.
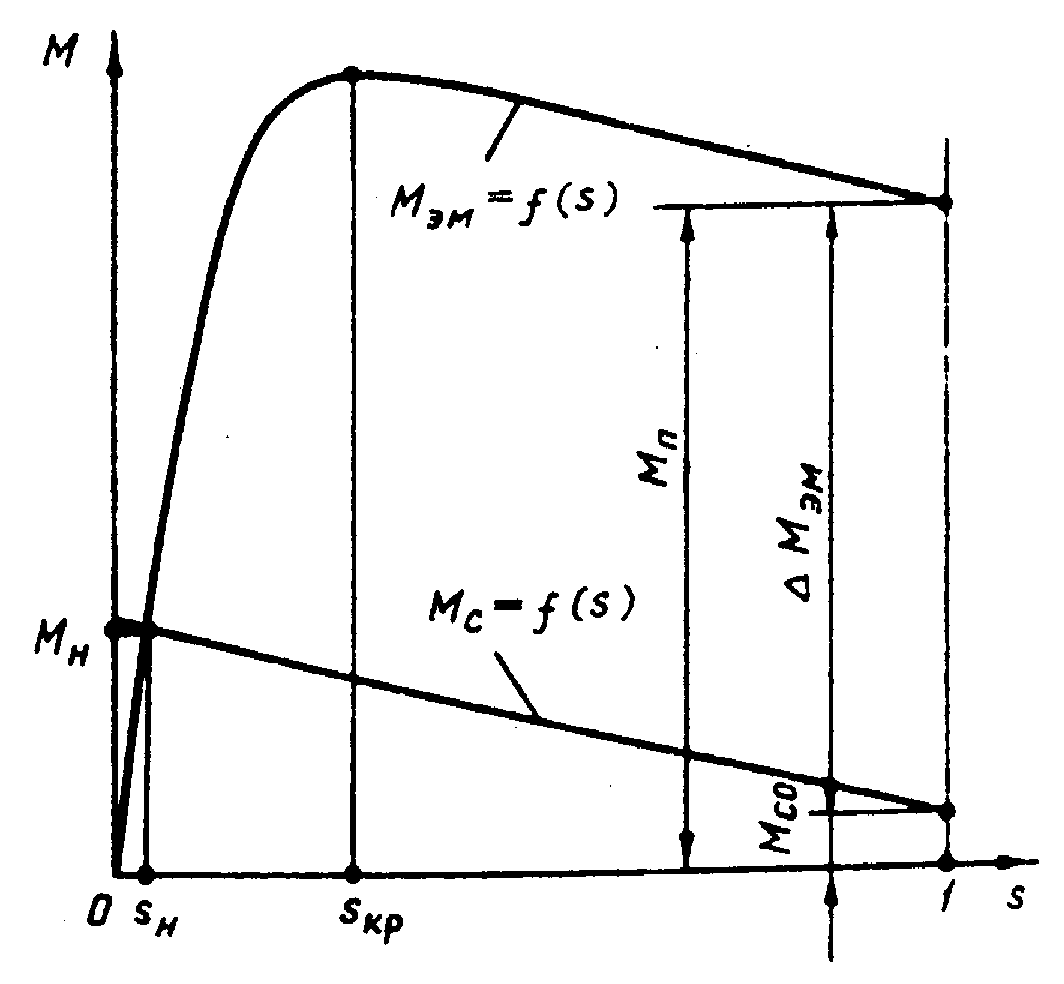
Рис.3.8. Механическая характеристика АГД
Стремление по возможности уменьшить суммарный момент потерь, т.е. величины номинального скольжения и активной составляющей тока статора, обусловило характерную особенность АГД - относительно большой намагничивающий ток, достигающий 60 - 90% от номинального значения. Коэффициент мощности составляет при этом cos =0,4 + 0,8. Он будет тем меньшим, чем с меньшим скольжением работает АГД.
Для обеспечения максимальной точности к АГД предъявляется ряд специфических требований:
- механическая стабильность элементов конструкции и их соединений, т.е. способность элементов конструкции сохранять постоянство положений центров масс в различных режимах работы и при различных внешних воздействиях;
- симметрия и жесткость конструкции в целом, связанные с необходимостью симметричного расположения (относительно продольной и поперечной осей симметрии) вращающихся и наиболее нагретых элементов конструкции, имеющих значительную массу;
- минимум и постоянство в процессе работы потребляемой мощности, т.е. нагрева АГД, и неравномерности распределения температур, что связано с уменьшением аэродинамических потерь (потерь на трение внешнего ротора о воздух), с обеспечением постоянства осевой нагрузки на подшипники и сохранности смазки, с применением подшипников, их сборок и смазки повышенного качества.
Реализация этих требований привела к созданию симметричных конструкций АГД, состоящих из минимального количества элементов. Так, например, внутренние дорожки качения подшипников (рис.3.7) часто изготавливаются непосредственно на оси, чем сокращается количество соединений деталей и повышается точность сборки.
В отличие от асинхронных машин обычного исполнения АГД не имеют осевого люфта в подшипниковых узлах. Требуемая жесткость конструкции обеспечивается предварительной осевой нагрузкой подшипников, которая в процессе работы должна оставаться неизменной.
Симметрия и жесткость конструкции АГД достигаются применением конструкционных материалов, имеющих одинаковый коэффициент расширения. Так, например, ось, крышки, кольца подшипников и ротор АГД выполняются из подшипниковой стали, а втулка - из бериллия.
Указанные особенности относятся также к синхронным гироскопическим двигателям (СГД), в качестве которых находят широкое применение гистерезисные двигатели .
В гироскопах авиационных приборов, устанавливаемых на самолетах гражданской авиации, ротор объединен с внутренней рамой в единый конструктивный блок — гироузел. Гироузел состоит из гирокамеры и размещенного в гирокамере гиромотора. Гирокамера выполняет роль внутренней рамы гироскопа и имеет оси для подвеса в опорах наружной рамы. Гиромоторы в большинстве случаев представляют собой трехфазные асинхронные двигатели с короткозамкнутым внешним ротором и внутренним статором. Гиромотор ГМ-4П (рис. 3.9) состоит из ротора, статора, шарикоподшипниковых опор и оси. Статор имеет пакет железа 2, обмотку 1 и втулками 3 и 12 жестко укреплен на оси 5. Выходные провода обмотки статора выведены наружу через полую часть оси 5. Ротор гиромотора состоит из латунного обода 10, пакета железа 8 с короткозамкнутой обмоткой 16 и массивного кольца 14. Пакет 8 ротора и кольцо 14 посажены в обод ротора на прессовой посадке. Фланцы 6 и 11 посажены в обод 10 с натягом и крепятся к нему винтами. Внутренние кольца шариковых подшипников 4 и 13 установлены на цапфы фланцев 6 и 11 ротора с натягом. Наружное кольцо подшипника 4 вставлено во втулку 3 с радиальным зазором, а наружное кольцо подшипника 13 — во втулку 12 с натягом В гнезде статора под наружным кольцом свободно сидящего шарикового подшипника 4 поставлена пружинная шайба 7. Она служит для компенсации температурных изменений линейных размеров гиромотора Прокладки 9 и 15 служат для установления осевого натяга на шариковых подшипниках Концы оси гиромотора имеют резьбу. При помещении гиромотора в гирокамеру его ось пропускается через отверстия в корпусе и крышки гирокамеры После крепления крышки гирокамеры к ее корпусу ось гиромотора крепится к ним с помощью гаек. Гироузлы одинаковых типов могут применяться в различных гироскопических приборах, Иначе обстоит дело с наружными рамами. Конструктивное исполнение наружных рам определяется в первую очередь типом гироприбора и является в каждом конкретном случае сугубо индивидуальным. В раме 1 на посадочные места по оси Охн закрепляются наружные кольца шариковых подшипников (рис. 3.10) Во внутренних кольцах шариковых подшипников закрепляются оси гирокамеры гироузла. По оси 0ун в раме закреплены полуоси 2 и 3, предназначенные для подвеса рамы в корпусе гироприбора.
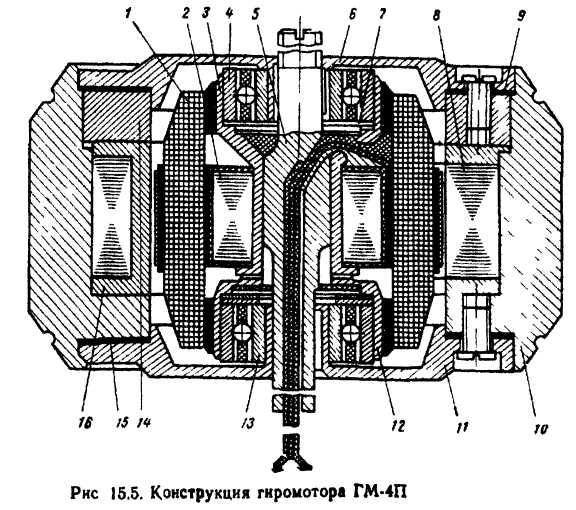
Рис. 3.9.Консрукция гиромотора ГМ-4П
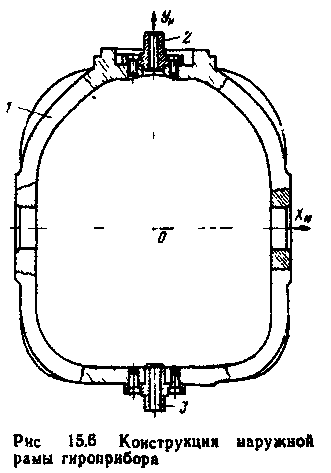
Рис. 3.10. Конструкция наружной рамы гироприбора
3.4 Виды подвесов гироскопа
При конструировании гироприборов большое внимание уделяется выбору опор, обеспечивающих свободу вращения и осуществляющих двустороннюю удерживающую связь между ротором, рамами карданова подвеса и корпусом прибора. Опоры гироскопа делятся на главные, обеспечивающие свободу вращения ротора, и опоры карданова подвеса, обеспечивающие свободу движения рам вокруг своих осей. Такая классификация обусловлена различными условиями работы опор Главные опоры в течение длительного времени работают при повышенных скоростях вращения, в то время как опоры карданова подвеса работают при малых скоростях и небольших углах поворота. Основными показателями качества опор являются: момент сил трения Мтр, осевые я радиальные люфты, долговечность работы Тр. Момент сил трения в главных опорах не влияет на точность гироприбора, но влияет на выбор мощности гиромотора и срок его службы. Момент трения в опорах карданова подвеса в значительной степени оказывает влияние на точность гироприбора. В связи с этим разрабатываются специальные меры для снижения трения в опорах карданова подвеса Отрицательное влияние на точность гироприборов оказывают также люфты в главных опорах карданова подвеса.
Наибольшее распространение в авиационных гироскопах получили шарикоподшипниковые опоры. Разработанные в настоящее время опоры такого типа позволяют получить достаточную точность и надежность приборов.
В тех случаях, когда необходимо повысить точность работы прибора, используют определенные конструктивные меры. В частности, моменты трения по внутренним осям карданова подвеса гироагрегатов курсовых систем уменьшают с помощью специальных «вращающихся» подшипников (рис. 3.11). Гироузел 3 трехстепенного гироскопа подвешен на оси 4 в наружной раме 7 с помощью комбинированных двойных подшипников. Средние кольца 2, 8 подшипников на левом и правом концах оси подвеса гироузла приводятся во вращение в противоположные стороны (привод вращения средних колец на рисунке не показан). Оси вращения 5, 9 наружной рамы закреплены в подшипниках 1, 6, наружные кольца которых неподвижны относительно основания.
Пусть
кинетический момент гироскопа совпадает
с направлением полета.
Тогда при повороте самолета относительно
поперечной оси с угловой
скоростью Ф наружная рама гироскопа
будет разворачиваться вместе
с основанием относительно неподвижной
оси 4
подвеса
гироузла с
угловой скоростью —
![]() .
Ось
4
остается
неподвижной в силу основного свойства
трехстепенного гироскопа — сохранять
неизменным в пространстве
положение главной оси.
.
Ось
4
остается
неподвижной в силу основного свойства
трехстепенного гироскопа — сохранять
неизменным в пространстве
положение главной оси.
При равенстве моментов трения в опорах уход гироскопа отсутствует. Однако на практике равенства моментов обеспечить не удается и уход имеет место, но со значительно меньшей скоростью, чем при невращающихся опорах. Снижению систематического ухода способствует введение периодического реверсирования вращения средних колец.
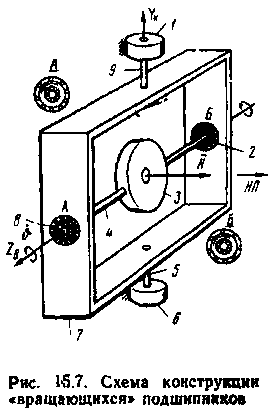
Рис. 3.11. Схема конструкции «вращающихся» подшипников
В случае равных и небольших времен вращения средних колец подшипников в разные стороны при реверсировании гироскоп будет отклоняться от среднего положения на равные и противоположные углы, совершая тем самым малые колебания относительно первоначального положения оси кинетического момента.
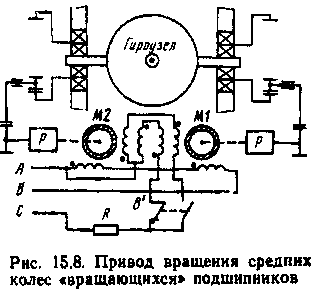
Рис. 3.12. Привод вращения средних колес «вращающихся» подшипников
Реверсирование вращения средних колец подшипников в гироагрегатах курсовых систем (рис. 3.12) производится переключателем В', управляемым специальным кулачком. Кроме «вращающихся» подшипников, могут быть использованы другие конструкции, позволяющие существенно снизить (или практически исключить) трение в подвесе гироскопа путем компенсации силы тяжести подвешиваемой части гироскопа некоторой другой противоположно направленной силой. К подвесам такого типа (рис. 3.13) относят: жидкостный (а), гидростатический (б), магнитный (в), электростатический (г) и др.
Из перечисленных типов подвесов в авиационных гироскопических приборах используется в настоящее время только жидкостный подвес (рис, 3.13, а). В гироскопе герметичный гироузел 1 подвешивается в герметичном корпусе 2, заполненном жидкостью. Плотность жидкости подбирается такой, чтобы масса вытесняемого гироузлом объема жидкости была равна массе гироузла. Тем самым воспринимаемая опорами нагрузка снижается практически до нуля, что обеспечивает весьма малые моменты сил трения в опорах подвеса гироузла.
Существуют также гироприборы на основе трехстепенного гироскопа с подвесом данного типа.
В гидростатическом подвесе жидкость или газ вводится под давлением через узкие отверстия 1 в зазор 2 между неподвижной частью опоры 4 и гироузлом 3 (рис. 3.13, б). При уменьшении зазора, вызванном нагрузкой, уменьшение расхода жидкости приводит к увеличению местного давления. Параметры подвеса выбираются таким образом, чтобы сумма сил местного давления уравновешивала силу веса гироузла при зазоре в пределах сотых долей миллиметра.
Магнитный подвес чувствительного элемента используется в криогенных гироскопах. Техническая реализация такого гироскопа базируется на использовании явления сверхпроводимости некоторых материалов, которое наступает при температурах, близких к абсолютному нулю. Это явление состоит в резком уменьшении электрического сопротивления материала. При помещении шарика из сверхпроводящего материала в магнитное поле, напряженность которого не превышает некоторого критического значения, на его поверхности наводятся токи, препятствующие проникновению поля внутрь шарика. Вследствие этого шарик может висеть в магнитном поле, не имея механической точки опоры. Если вокруг шарика создан вакуум, то практически исключатся все силы сопротивления вращению шарика.
В экспериментальном криогенном гироскопе (рис. 3.13, в) корпус прибора представляет собой криогенную установку 7, заключенную в кожух 8 (сосуд Дьюара). Криогенная установка охлаждается жидким гелием или азотом и внутри сферической полости 4 в корпусе прибора поддерживается температура, близкая к абсолютному нулю. Ток, протекающий по обмоткам катушек 1, создает центрирующее магнитное поле 2. На поверхности полой тонкостенной сферы 3, сделанной из сверхпроводящего металла, например ниобия, образуются вихревые токи, создающие магнитное поле, препятствующее проникновению центрирующего магнитного поля в металл. Силы взаимодействия центрирующего магнитного поля и поля, наводимого в металле сферы, удерживают ее во взвешенном состоянии внутри сферической полости корпуса прибора. Сфера 3 и тяжелый обод (5, помещенный внутри сферы, образуют ротор гироскопа, который приводится во вращение с большой угловой скоростью Ω вокруг оси z, перпендикулярной плоскости обода, электродвигателем 5. В пространстве между сферическим ротором и полостью корпуса создается высокий вакуум. Электродвигатель 5 используется только для разгона ротора. После отключения двигателя ротор движется по инерции в течение нескольких дней и даже месяцев.
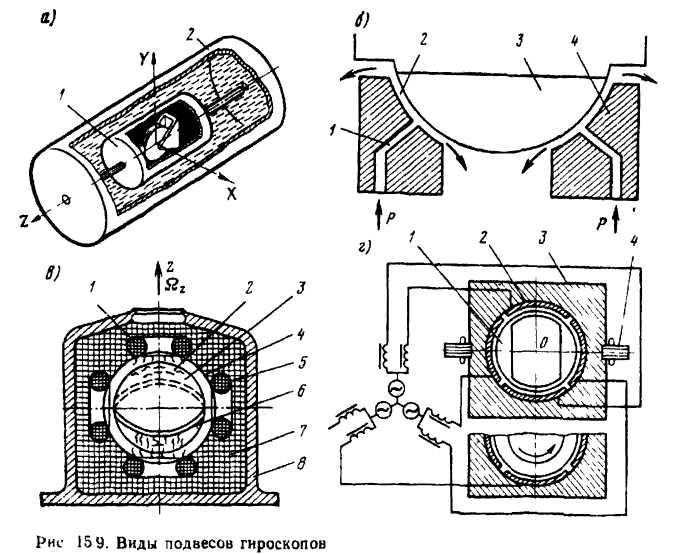
Рис. 3.13. Виды подвесов гироскопа
Гироскопы с электростатическим подвесом (рис. 3.13, г) конструктивно аналогичны криогенным гироскопам. Ротор 1 такого гироскопа изготовлен из бериллия в виде тонкого полого шара, помещенного в сферическую полость камеры 3, выполненной из специальной керамики, являющейся изолятором. На внутренней поверхности камеры расположены три пары чашеобразных электродов 2, питаемых переменным электрическим током. Оси симметрии каждой пары таких электродов направлены по трем взаимно перпендикулярным направлениям, поэтому создаваемое ими электростатическое поле удерживает центр сферического ротора в центре О камеры. Ротор раскручивается с помощью вращающегося магнитного поля, создаваемого статором 4, несущим на себе электрическую обмотку. В полости камеры 3 поддерживается высокий вакуум. Электрическое напряжение на обмотку статора подается лишь в период разгона ротора. В дальнейшем ротор длительное время вращается по инерции.
3.5 Устройства для передачи энергии
Устройства для передачи энергии служат для подвода электрической энергии от внешних источников к элементам гироприборов, расположенным на перемещающихся относительно друг друга узлах. С помощью данных устройств осуществляется электрическая связь между элементами, помещенными на корпусе прибора и наружной раме карданова подвеса или на наружной и внутренней рамах.
Наиболее просто энергия передается посредством гибких проволочных проводников (рис. 3.14), Гибкий проводник 3 представляет собой пучок металлических жил, помещенных в изоляционную оплетку.
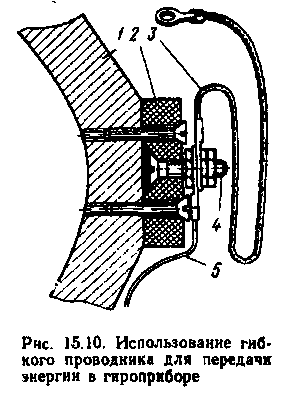
Рис. 3.14. Использование гибкого проводника для передачи энергии в гироскопе
Концы жил заделаны в общий наконечник, закрепленный на переходных контактах 4. Контакты обеспечивают соединение наконечника с жестким проводом 5, расположенным на соответствующей детали 1 подвеса. Контакты монтируют на колодке 2, изолирующей контакты от металлической поверхности детали.
В тех случаях, когда углы взаимного разворота деталей гироприбора достигают существенных значений, для передачи энергии применяют скользящие контакты (рис. 3.15, а). Щетка 3, по которой передается электрический ток, скользит по токоприемному кольцу 2. Кольцо изолировано от оси рамы 1 сплошной изоляционной втулочкой с ребордами, предохраняющими щетку от схода с кольца. Если в местах сочленения деталей подвеса необходимо осуществить несколько изолированных друг от друга линий передачи электрического тока, то по оси подвеса устанавливается необходимое число токоприемных колец.
Широко применяемой разновидностью устройств передачи энергии являются точечные контакты. Они отличаются от скользящих контактов тем, что в данном случае точка контакта лежит на оси вращения элементов токоподвода. Каждый точечный контакт (рис. 3.15, б) состоит из неподвижного 3 и подвижного 4 контактов, образующих контактную пару. В приведенном примере неподвижные контакты закреплены на наружной раме 2, а подвижные—на оси вращения внутренней рамы 1. Контакты 3 и 4 изолированы от металлических деталей подвеса электроизоляционным материалом 5.
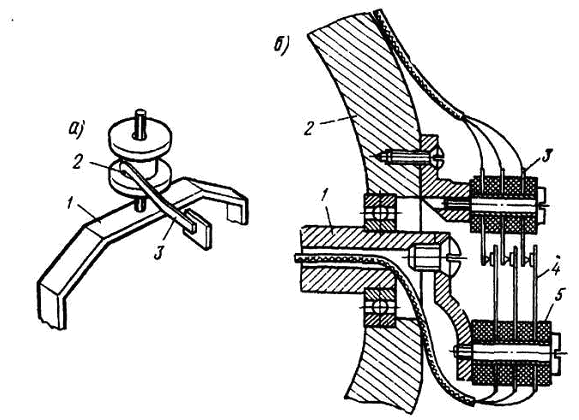
Рис 3.15 контактные устройства используемеые в гироприборах.
а-скальзящие, 2-набор точечных контактов.
3.6 Корректирующие устройства.
Одним из основных свойств трехстепенного гироскопа является способность сохранять неизменным положение оси вращения ротора (главной оси гироскопа) в мировом пространстве. Однако для решения ряда практических задач необходимо, чтобы главная ось гироскопа сохраняла неизменное направление не в мировом пространстве, а относительно той или иной выбранной системы координат. Так, для определения с помощью трехстепенного гироскопа углов крена и тангажа ЛА необходимо, чтобы ось вращения ротора была направлена по вертикали места. При определении с помощью трехстепенного гироскопа отклонений ЛА от заданного направления необходимо, чтобы его главная ось выдерживала заданное направление в горизонтальной плоскости. Для устранения нежелательных отклонений главной оси гироскопа от требуемого направления или компенсации различного рода возмущающих моментов, нарушающих нормальный режим работы гироскопического прибора, применяют корректирующие устройства.
Корректирующие устройства гироскопических приборов обеспечивают сохранность требуемого положения главной оси гироскопа путем приложения к гироскопу внешних управляющих (корректирующих) моментов или компенсацию уходов гироскопа в показаниях гироприбора. Основными элементами корректирующих устройств являются чувствительные элементы и исполнительные органы. В качестве чувствительных элементов выбирают элементы, обладающие избирательностью к опорному направлению или устойчиво сохраняющие заданное им направление, В авиационных приборах в основном используют гравитационные, магнитные и ориентированные по небесным светилам чувствительные элементы.
Опорным направлением для гравитационных элементов является направление вертикали места, совпадающее с направлением ускорения силы тяжести. Магнитные чувствительные элементы реагируют на магнитное поле Земли, поэтому опорным направлением для них является направление магнитного меридиана. Чувствительные элементы, ориентированные по небесным светилам, обеспечивают задание устойчивого направления на Солнце, Луну, планеты или звезды. Исполнительными органами корректирующих устройств авиационных приборов являются, как правило, двухфазные' реверсивные асинхронные электродвигатели, работающие в заторможенном режиме, а также сельсинные и потенциометрические следящие системы.
Среди гравитационных чувствительных элементов наиболее широкое распространение получили жидкостные маятниковые датчики направления вертикали. Используются однокоординатные и двухкоординатные жидкостные маятниковые датчики (маятниковые переключатели).
Однокоординатный жидкостный маятниковый датчик (ЖМД) (рис. 3.16) представляет собой стеклянный баллон 1 с вваренными в него платиновыми электродами 3, 5, 6. Баллон заполнен токопроводящей жидкостью (электролитом) 2 так, что оставшийся воздушный пузырек 4 при горизонтальном положении датчика поровну и примерно наполовину перекрывает электроды 3, 5. Электрическая схема взаимодействия ЖМД и исполнительного органа (двухфазного асинхронного двигателя) системы коррекции приведена на рис. 15.13. Электроды 3 и 6 в сосуде 5 соединены с обмотками управления двигателя 2, Общая точка обмоток управления 1подключена к одной из фаз источника литания переменного тока. Центральный контакт 4 подключен к другой фазе.
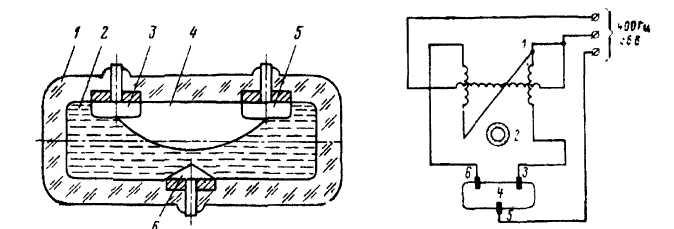
Рис. 3.16. Однокоординатный жидкостный маятниковый датчик
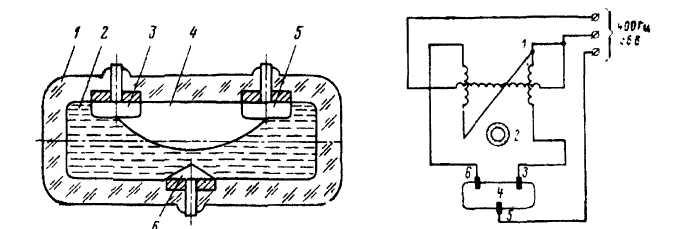
Рис. 3.17. Электрическая схема однокоординатной системы коррекции
Схемы коррекции главной оси трехстепенного гироскопа в плоскости горизонта и по направлению вертикали места приведены на рис. 3.18. На рис.3.18, а приведена схема горизонтальной коррекции главной оси
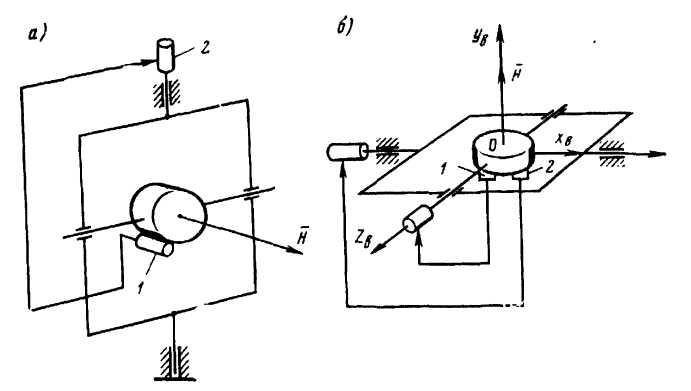
Рис. 3.18. Коррекция главной оси трехстепенного гироскопа:
а – схема горизонтальной коррекции; б – схема коррекции по направлению вертикали места
трехстепенного гироскопа (1 — жидкостный маятниковый датчик, 2 — коррекционный двигатель). При горизонтальном положении главной оси гироскопа, а следовательно, и датчика электрическое сопротивление между средним электродом 6 (см. рис. 3.16) и каждым из крайних электродов 3, 5 одинаково, и по управляющим обмоткам коррекционного двигателя протекают токи, равные по величине, но противоположные по направлению. В этом случае двигатель неподвижен и момента не создает. При отклонении главной оси гироскопа от плоскости горизонта воздушный пузырек смещается относительно электродов и изменяется площадь контактной поверхности электролита с электродами. Электрическое сопротивление цепей между центральным и крайними электродами изменяется. При этом большим становится сопротивление цепи того электрода, поверхность соприкосновения которого с жидкостью меньше. В результате по управляющим обмоткам коррекционного двигателя потекут разные по значению и направлению токи. Двигатель создаст момент относительно оси подвеса наружной рамы, и гироскоп начнет прецессировать относительно оси подвеса гироузла. Схема горизонтальной коррекции (рис. 3.18, а) срабатывает таким образом, что коррекционный двигатель вызывает прецессию гироскопа в направлении, при котором угол рассогласования главной оси и плоскости горизонта уменьшается.
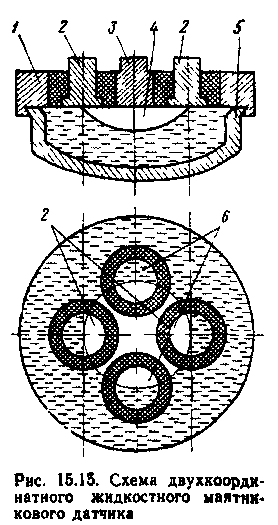
Рис. 3.19. Схема двухкоординатного жидкостного маятникового датчика
Однокоординатные ЖМД используются также для удержания главной оси трехстепенного гироскопа по направлению вертикали места (рис. 3.18, б). Ось гироскопа будет совпадать с направлением вертикали места, если оси Охв и Оzв находятся в плоскости горизонта. Это обеспечивается соответствующим расположением ЖМД. Ось чувствительности маятника 1 направляется параллельно оси Оzв, ось чувствительности маятника 2 — параллельно оси 0хв. Иногда маятник 1 располагают на наружной раме. В этом случае он также реагирует на отклонение оси 0zв гироскопа от плоскости горизонта. Электрические схемы коррекции по каждой из осей Охв, 0zв аналогичны схеме, изображенной на рис. 3.17. Часто в качестве чувствительного элемента системы, обеспечивающей коррекцию главной оси трехстепенного гироскопа по направлению вертикали места, используется двухкоординат-ный ЖМД (рис. 3.19). На металлическом корпусе 1 смонтированы изолированные от корпуса и между собой две пары электродов 2, 6 расположенных по окружности и на равном расстоянии друг от друга. Корпус 1 соединен с металлическим кожухом 5. Кожух почти полностью, за исключением пузырька воздуха 4, заполнен электролитом. Каждая пара электродов 2, 6 и центральный контакт 3 работают аналогично од но координатном у датчику.
Магнитные чувствительные элементы используются для измерения отклонений главной оси гироскопа от плоскости магнитного меридиана. Наиболее простым чувствительным элементом подобного типа является магнитная стрелка. Однако вследствие малого восстанавливающего момента магнитной стрелки в современных авиационных приборах применяют в основном индукционные чувствительные элементы (рис. 3.20, а). Они состоят из двух одинаковых и параллельно расположенных пермаллоевых стержней 1 с уложенными на них первичными обмотками 2, питаемыми переменным напряжением частоты ωп, и вторичной (сигнальной) обмоткой 3, охватывающей оба стержня. Первичные обмотки намотаны на стержнях в разные стороны. Создаваемые первичными обмотками переменные магнитные потоки одинаковы по величине и противоположны по направлению* поэтому они не создают в сигнальной обмотке электродвижущую силу. Однако вследствие переменности магнитных потоков, создаваемых в стержнях, их магнитная проницаемостьцс периодически меняется по закону
![]() (3.3)
(3.3)
где μ0, μа — постоянная и переменная составляющие магнитной проницаемости.
Если индукционный чувствительный элемент размещен в плоскости горизонта, то горизонтальная составляющая напряженности магнитного поля Земли Н3г создает в стержнях индукцию Вс, а следовательно, и постоянные магнитные потоки
![]() (3.4)
(3.4)
где S — площадь сечения стержней.
При этом направления потоков в обоих стержнях одинаковы, а их значения пропорциональны магнитной проницаемости материала стержней и косинусу углами между направлением магнитного меридиана и продольными осями стержней. Вследствие того что магнитная проницаемость стержней периодически меняется из-за переменности магнитных потоков, создаваемых переменным напряжением первичных обмоток, постоянные магнитные потоки от действия магнитного поля Земли в стержнях преобразуются в переменные. Эти потоки направлены в стержнях в одинаковом направлении и индуцируют в сигнальной обмотке электродвижущую силу, вследствие чего на выходе сигнальной обмотки появляется переменное напряжение
![]() (3.5)
(3.5)
где
![]() ;ω
— число витков в сигнальнойобмотке;
k
— коэффициент
пропорциональности.
;ω
— число витков в сигнальнойобмотке;
k
— коэффициент
пропорциональности.
Амплитудное значение выходного напряжения UВЫХА в сигнальной обмотке зависит от расположения стержней по отношению к магнитному меридиану, характеризуемого углом ψМ.
Из выражения (3.5) следует, что индукционный чувствительный элемент не дает возможность определить знак разворота стержней по отношению к магнитному меридиану Icos (±ψМ) = cos ψМ и не решает задачу определения курса в пределах 0—360°, так как cos ψМ изменяется от 1 до О в пределах 0 ... 90°. В современных авиационных приборах используются индукционные датчики, состоящие из трех индукционных чувствительных элементов, расположенных относительно друг друга под углом 60° (рис. 3.20, б). Сигнальные обмотки соединены по схеме «треугольник».
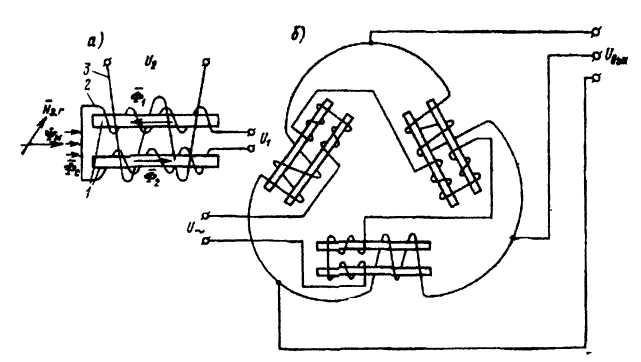
Рис. 3.20. Схема индукционного датчика:
а – чувствительного элемента; б – датчика, состоящего из трех индукционных чувствительных элементов
Схема коррекции трехстепенного гироскопа в плоскости меридиана с помощью индукционного датчика приведена на рис. 3.21.
В начальный момент направление главной оси гироскопа 1 совпадает с направлением магнитного меридиана. Ось наружной рамы гироскопа через редуктор связана с осью, на которой расположен индукционный датчик 5. Сигнал с него поступает на сельсин-приемник 4. С роторной обмотки сельсина-приемника сигнал поступает на усилитель 3, а с него на двигатель 2. В том случае, если главная ось гироскопа отклонится от направления меридиана, ось чувствительности индукционного датчика поворачивается относительно направления горизонтальной составляющей магнитного поля Земли, и с индукционного датчика сигнал поступает через сельсин и усилитель 3 на двигатель 2. Двигатель создает момент относительно оси подвеса гироузла, что приводит к прецессии гироскопа относительно оси наружной рамы в направлении уменьшения отклонения главной оси гироскопа и оси чувствительности индукционного датчика от направления магнитного меридиана до тех пор, пока это отклонение, а следовательно и сигнал с индукционного датчика не станет равным нулю.
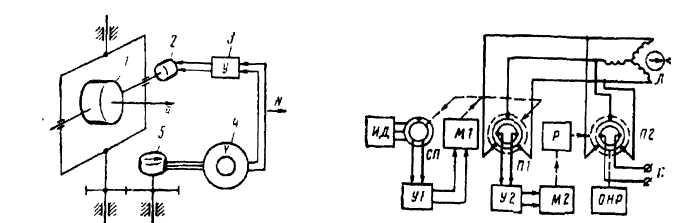
Рис. 3.21. Схема коррекции трехстепенного гироскопа в плоскости магнитного меридиана

Рис. 3.22. Компенсационная схема коррекции показаний гироскопа направления
Недостатком данной схемы коррекции является то, что ось вращения наружной рамы гироскопа нагружается дополнительным возмущающим моментом из-за трения в оси крепления индукционного датчика и его инерционности относительно этой оси. Такой дополнительный момент существенно снижает точность прибора.
В настоящее время используется в основном компенсационная схема коррекции показаний гироскопа направления (рис. 3.22). Индукционный датчик ИД закреплен на корпусе самолета. При отклонении продольной оси самолета от направления магнитного меридиана с датчика поступает сигнал в сельсинную следящую систему (сельсин-приемник СП, усилитель У1, двигатель M1). Следящая система разворачивает щетки потенциометра Ш на угол, пропорциональный углу отклонения самолета от магнитного меридиана. Щетки потенциометра П2, закрепленные на корпусе самолета, также развернутся на угол поворота самолета относительно корпуса потенциометра, жестко закрепленного на оси наружной рамы ОНР гироскопа. Потенциометрическая следящая система, состоящая из потенциометров П1, П2, усилителя У2, двигателя М2 и редуктора Р, будет в данном случае согласована, а стрелка логометра Л развернется на угол, пропорциональный углу поворота самолета, т. е. магнитному курсу.
Если при прямолинейном полете самолета с произвольным курсом имеет место уход оси гироскопа, то корпус потенциометра П2 развернется относительно щеток и потенциометрическая следящая система рассогласуется. Появляется напряжение на выходе обмотки потенциометра П1 и двигатель М2 через редуктор Р развернет щетки потенциометра П2 до согласования следящей системы. Показания логометра при этом не изменяются. Рассмотренная схема коррекции показаний курса позволяет осреднить и стабилизировать показания индукционного датчика и в то же время на точность se работы не влияют уходы гироскопа в плоскости горизонта.
Аналогичным образом работают системы с (чувствительными элементами, ориентированными по небесным светикам. В данном случае вместо индукционного датчика включается датчик, выдающий информацию об отклонении оси чувствительности чувствительного элемента, реагирующего на интенсивность светового потока светила, от заданного направления.
3.7 Демпфирующие устройства.
Демпфирующие устройства предназначены для создания моментов, пропорциональных скорости поворота подвижной системы. Это необходимо в ряде гироприборов для демпфирования колебаний подвижной системы и обеспечения ее требуемых динамических характеристик. В качестве демпфирующих устройств в гироприборах применяются пневматические, гидравлические и магнитоэлектрические демпферы. Наиболее просты и удобны пневматические демпферы. Они, как правило, представляют собой цилиндр, внутри которого перемещается поршень, шток которого через кинематическую передачу связан с осью подвижной части гироприбора. Цилиндр закрепляется на корпусе прибора. В донной части цилиндра имеется капиллярное отверстие для прохода воздуха, регулируемое с помощью винта. При перемещении поршень засасывает или вытесняет воздух из цилиндра * через капиллярное отверстие, что и обеспечивает демпфирование колебаний подвижной системы.
Распространенной конструкцией гидравлического демпфера является следующая. Герметический цилиндр, в котором размещена подвижная система гироприбора, подвешивается на оси в герметическом корпусе прибора. Пространство между корпусом прибора и цилиндром заполняется специальной жидкостью. При вращении цилиндра жидкость создает гидравлическое демпфирование, которое имеет ряд преимуществ перед пневматическим. В частности, из-за несжимаемости жидкости демпфирующий момент строго пропорционален угловой скорости вращения цилиндра, что не характерно для пневматического демпфера. Кроме того, жидкость частично взвешивает цилиндр с подвижной системой и уменьшает давление на опоры, что приводит к уменьшению трения и повышению чувствительности прибора.
Магнитоэлектрические демпферы основаны на взаимодействии магнитного поля катушки, по которой протекает ток, с полем постоянного магнита. Катушка обычно располагается на корпусе прибора, а постоянный магнит связывается с подвижной системой гироприбора и поворачивается относительно катушки при поворотах подвижной системы. Возникающее при этом взаимодействие магнитных полей катушки и магнита создает момент относительно оси подвеса подвижной системы, пропорциональный скорости ее поворота.
3.8 Устройства для съема результатов измерений
Устройства для съема результатов измерений. Результаты измерений с гироприборов для использования их в процессе управления полетом снимаются визуально и по электрическим каналам. Для визуального съема показаний применяют различные шкаловые и индикаторные устройства. Эти устройства устанавливают непосредственно на гироскопе или связывают с гироскопом системой дистанционной передачи, В первом случае система механических передач обеспечивает индикацию перемещения наружной рамы карданова подвеса относительно корпуса прибора, что дает возможность визуально определить угол крена или курса в зависимости от типа прибора.
Во втором случае углы поворота рам карданова подвеса передаются сельсинной следящей системой в автономный указатель 3 (рис. 3.23, а). Угол разворота внутренней рамы гироскопа относительно наружной (или наружной рамы относительно корпуса прибора) приводит к развороту ротора сельсина-датчика 1 по отношению к его статору. При этом с обмотки сельсина-приемника 2 поступает напряжение на двигатель М через усилитель У. Ротор сельсина-приемника 2 и вместе с ним стрелка отсчетного устройства 3 разворачиваются до тех пор, пока напряжение, поступающее на усилитель У, не станет равным нулю. Разворот стрелки отсчетного устройства будет пропорционален углу разворота рам гироскопа.
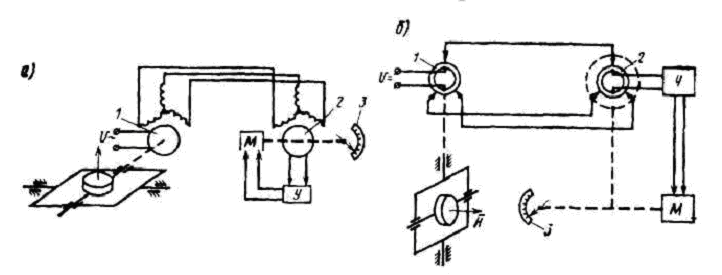
Рис 3.23 съём результатов измерений с помощью следящей системы:
а- сельсинной, б- потенциометрической.
Углы поворота рам карданова подвеса гироскопа в углы поворота стрелок отсчетных устройств могут преобразовываться также с помощью потенциометрических следящих систем (рис. 3.23, б). Корпус потенциометра 1 следящей системы связан с осью наружной рамы, а его щетки закреплены на корпусе прибора. При развороте корпуса прибора вместе с самолетом относительно неподвижной наружной рамы происходит рассогласование следящей системы, С потенциометра 2 сигнал поступает на двигатель М через усилитель У. Ротор двигателя разворачивает щетки потенциометра 2 и вместе с ними стрелку отсчетного устройства 3 до тех пор, пока напряжение, поступающее на усилитель У, не станет равным нулю. Разворот стрелки отсчетного устройства 3 будет пропорционален углу разворота самолета относительно наружной рамы.
Результаты измерений с гироприборов для передачи их в управляющую систему снимаются с помощью потенциометрических датчиков, сельсинов, синусно-косинусных трансформаторов и индукционных датчиков. Широкое применение потенциометрических датчиков объясняется их простотой и возможностью применения в схемах постоянного и переменного тока. Значительная мощность снимаемого сигнала позволяет в ряде случаев не применять усилители. Недостатками потенциометрических датчиков являются значительный момент трения, ступенчатость снимаемого напряжения, наличие трущихся контактов и, как следствие, малая надежность. Датчиками, лишенными перечисленных недостатков, являются индукционные датчики, сельсины и синусно-косинусные трансформаторы. Однако они более сложны по конструктивному исполнению и имеют нелинейную характеристику при больших углах разворота.
3.9 Арретирующие устройства.
Арретирующие устройства предназначаются для фиксирования главной оси гироскопа в заданном положении относительно корпуса прибора в период подготовки прибора к работе. Чаще всего арретирующие устройства устанавливают в авиагоризонтах. Они изготовляются с ручным и дистанционным управлением (рис. 3.24).
При ручном арретировании гироскопа с вращающимся ротором (рис. 3.24, а) толкатель 12 перемещается вручную в направлении, указанном
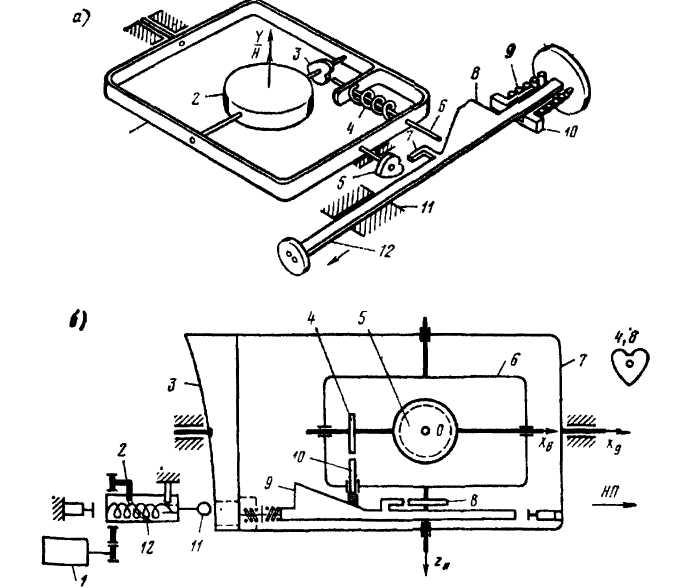
Рис. 3.24. Виды арретирующих устройств:
а – с ручным управлением; б – с дистанционным управлением
стрелкой, по направляющим 10 и 11, сжимая пружину 9. Выступ 7 толкателя 12 упирается в кулачок 5. Тангенциальная составляющая силы давления на кулачок создает момент относительно оси вращения наружной рамы 1. Под действием этого момента гироскоп прецессирует относительно оси подвеса гироузла.
При совпадении направления главной оси гироскопа с направлением оси подвеса наружной рамы гироскоп теряет одну степень свободы и начинает вращаться относительно оси наружной рамы до тех пор, пока выступ 7 не западет в паз кулачка 5. В это же время клин 8 толкателя 12 воздействует на толкатель 6, который в свою очередь давит на кулачок 3, создавая момент относительно оси подвеса гироузла 2. При перемещении толкателя 6 пружина 4 сжимается. Давление толкателя 6 на кулачок 3 вызывает движение гироскопа относительно оси гироузла до тех пор, пока толкатель 6 не попадет в паз кулачка 3. Авиагоризонт оказывается заарретированным по обеим осям.
При разарретироваиии толкатель 12 под действием пружины 9 перемещается в противоположном направлении. Одновременно и толкатель 6 под действием пружины 4 возвращается в первоначальное положение. Гироскоп приобретает свободу поворота относительно осей подвеса наружной рамы и гироузла.
Схема арретирующего устройства дистанционного управления приведена на рис, 3.24, б. Процесс арретирования происходит следующим образом. При подаче напряжения на двигатель 1 его ротор начинает вращаться, что вызывает поступательное движение штока 12 благодаря перемещению пальца 2 по винтовой прорези на штоке. Ролик 11, закрепленный на конце штока 12, давит на торцовый кулачок 3 дополнительной рамы 7. Рама 7 поворачивается и устанавливается в положение, при котором ось наружной рамы 6 ОzН параллельна поперечной оси самолета. В этом положении ролик 11 соскальзывает с кулачка 3 и начинает давить на толкатель 9. Упор толкателя 9 давит на профильный кулачок 5, закрепленный на оси наружной рамы. Под действием создаваемого при этом момента гироскоп прецессирует относительно оси Охв подвеса гироузла 5 и доходит до упора. Прецессия прекращается и гироскоп поворачивается вокруг оси наружной рамы до тех пор, пока выступ толкателя 9 не войдет в вырез кулачка 8. Одновременно с этим толкатель 10 перемещается по наклонной поверхности толкателя 9 и входит во взаимодействие с кулачком 4. Под действием давления толкателя 10 на кулачок 4 гироузел 5 разворачивается относительно оси его подвеса, толкатель 10 входит в паз кулачка 4, и гироузел устанавливается таким образом, что главная ось гироскопа становится перпендикулярной осям ОхВ и ОzН. Весь цикл арретирования совершается за один оборот шестерни редуктора. После этого палец 2 попадает в продольную канавку штока 12 и под действием пружин возвращается в исходное положение, давая возможность толкателям 9 и 10 освободить кулачки 8 и 4. Таким образом, арретирующее устройство, установив гироскоп в требуемое положение, сразу же освобождает его.