

4.9АвиагоризонтАгр-72а
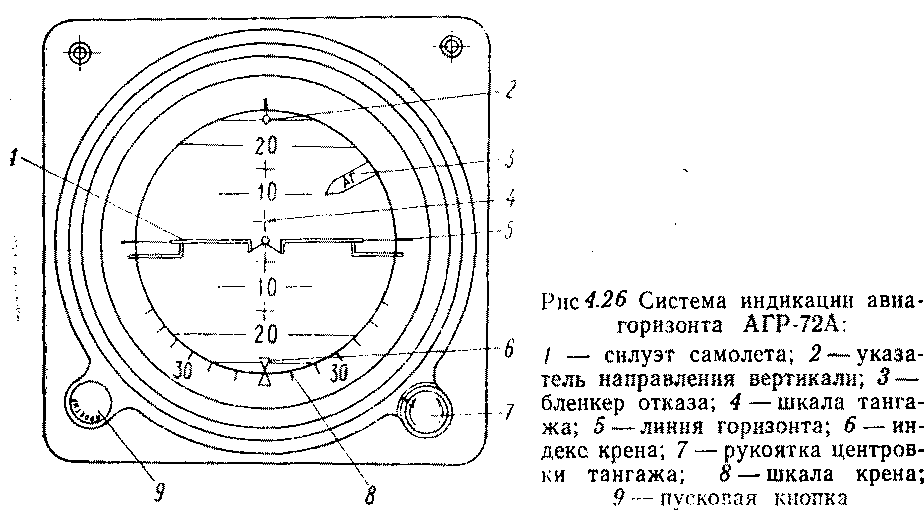
Резервный авиагоризонт АГР-72А(рис 4.26) предназначен для определения положения самолета в пространстве относительно плоскости горизонта и для индикации этого положения во всем диапазоне углов крена тангажа.
Технические данные
Питание от преобразователя ПТ-500Ц (ПТС-250)_______36 В 400 Гц
Диапазон измерения углов крена и тангажа____________±180°
Инструментально-шкалокая погрешность но крену и тангажу:
в пределах углов ±30°, не более______________________±1,5"
в остальных отметках шкалы, не более________________±2,5°
Принцип действия и устройство. Принцип действия авиагоризонта основан на свойстве гироскопа с тремя степенями свободы, снабженного жидкостной маятниковой коррекцией, удерживать свою главную ось вращения .по вертикали земли. Жидкостная маятниковая коррекция гироскопа состоит из электролитических маятников для измерения направления вертикали. моторов поперечной и продольной коррекции. Для устранения ошибок, возникающих при развороте самолета по курсу, поперечная коррекция отключается но сигналу от выключателя коррекции ВК-90 № 4.
Ось внутренней рамы гироскопа параллельна продольной оси самолета, ось внешней рамы параллельна поперечной оси самолета. При таком расположении осей при кренах самолета ось внешней рамы стремится совместиться с главной осью гироскопа, что приводит к «выбывианию» гироскопа. Чтобы не допустить этого, ось внешней рамы крепится на подшипниках не в корпусе прибора, а в следящей раме. Система следящей рамы, кроме самой рамы, ось вращения которой расположена по продольной оси самолета, имеет индукционный датчик, усилитель и двигатель-генератор. Если при крене самолета угол между осью внешней рамы и главной осью гироскопа станет меньше 90°, то сигнал с индукционного датчика через усилитель идет на двигатель-генератор, который отрабатывает следящую раму в сторону, обратную крену, н восстанавливает перпендикулярность главной оси и оси внешней рамы. Так, благодаря следящей рамс, авиагоризонт обеспечивает определение положения самолета относительно плоскости истинного горизонта во всем диапазоне углов крена и тангажа. Для обеспечения минимального времени готовности в авиагоризонте применен электромеханический стопор. Стопор удерживает внешнюю раму гироузла в пределах ±30° от нулевого положения и фиксирует следящую раму в положении, в котором она находилась в момент выключения питания, сохраняя это положение до следующего включения. Для сигнализации отказа питания применен индикатор потре бляемого тока ИПТ. Стопор и сигнализатор отказа питания приводятся в действие от одного электродвигателя. При включении питания потребляемый ток большой, и ИПТ выдает сигнал отказа. По мере раскрутки ритора гироскопа потребляемый ток уменьшается, и ИПТ выдает сигнал на включение электродвигателя, который, сжимая рабочую пружину, расстопоривает гпроуэел и убирает бленкер «АГ» с лицевой части прибора. При обрыве любой из трех фаз или при заклинении гиромотора, когда потребляемый ток увеличивается, ИПТ снимает питание с электродвигателя. Рабочая пружина, не встречая противодействия электродвигателя, арретирует гироузел и перемещает бленкер «АГ» на лицевую часть прибора.
Индикация. Система индикации авиагоризонта выполнена по типу «Вид с самолета на землю». Преимущество индикации такого типа—отсутствие необходимости переориентации при переходе от пилотирования по авиагоризонту к пилотированию но видимому горизонту и наоборот. При системе индикации «Вид с самолета на землю» силуэт самолета закреплен на корпусе прибора, а сферическая шкала тангажа, закрепленная на гироскопе, имеет возможность поворачиваться вокруг поперечной и продольной оси прибора