

9.5.3. Режим магнитной коррекции (мк)
Курсовая система ТКС-П работает в режиме магнитной коррекции, когда переключатель рода работы на пульте управления установлен в положение МК.
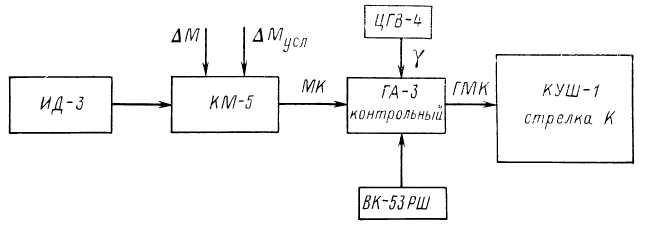
Рис. 9. 43. Функциональная схема курсовой системы ТКС-П по линии контрольного гироагрегата в режиме МК
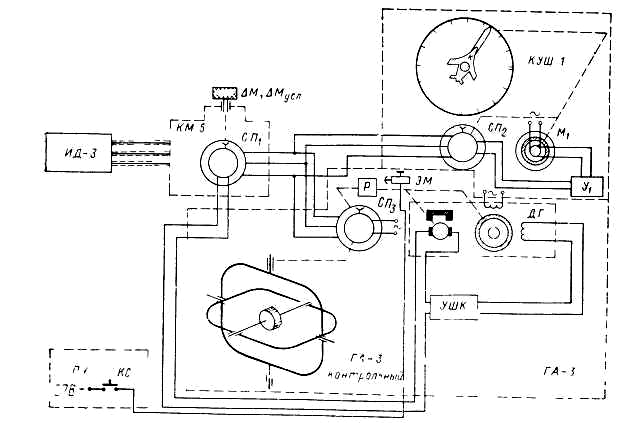
Рис. 9.44. Принципиальная электромеханическая схема индикации гиромагнитного курса курсовой системы ТКС-П в режиме МК по линии контрольного гироагрегата
Переключение системы в режим магнитной коррекции обычно начинают с контрольного гироагрегата. Переключатель «Коррекция»— «Осн.-Контр.» ставят в положение «Контрольный». При этом контрольный гироагрегат подключается к индукционному датчику ИД-3 и работает согласно функциональной схеме (рис. 9.43) и соответствующей ей принципиальной электромеханической схеме (рис. 9.44).
Магнитный курс формируется следящей системой ИД-КМ и выдается в схему в виде поворота ротора сельсина CП1 коррекционного механизма.
Лекальный механизм коррекционного механизма КМ 5 предназначен, как и во всех коррекционных механизмах, для уничтожения четвертной магнитной девиации и инструментальных ошибок следящих систем.
На лицевой стороне коррекционного механизма имеется кремальера 3 (рис. 9.45), с помощью которой по индексу 4 и шкале 2 устанавливаются значения магнитного и условного склонений. Стрелка 1 коррекционного механизма показывает компасный курс индукционного датчика.
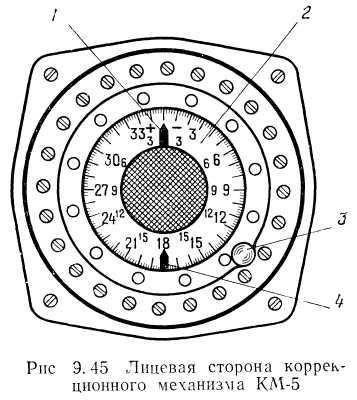
Рис. 9.45. Лицевая сторона коррекционного механизма КМ-5
Статор сельсина СП1 электрически соединен со статором сельсина СП2, расположенного в указателе КУШ-1, и со статором СД3 (грубый) контрольного гироагрегата и образует таким образом две следящие системы КМ — КУШ-1 стрелка К и КМ-ГА.
Следящая система КМ-ГА состоит из сельсина СП1 коррекционного механизма, сельсина СД3 гироагрегата, двигателя-генератора ДГ и усилителя УШК. Назначение этой следящей системы в режиме МК — выработка гиромагнитного курса. Принцип ее работы такой же, как и в системе в КС-6. Скорость разворота статора СД3 может быть 40 угл.мин/мин и 2 град/с при нажатой кнопке КС на пульте управления. Сравнительно небольшая скорость 40 угл.мин/мин работы следящей системы определяется тем, что гироскопы гироагрегатов курсовой системы имеют небольшие собственные уходы. Следовательно, можно допустить небольшую скорость следящей системы с тем, чтобы повысить ее сглаживающие и фильтрующие свойства при комплексировании индукционного магнитного и гироскопического датчиков курса.
Особенностью следящей системы КМ-ГА является и то, что в режиме ГПК она выполняет роль исполнительного механизма, широтной коррекции и работает как интегрирующий привод. В режиме МК она работает как обычная следящая система, но для этого усилитель УШК переключается на вход по переменному току.
Следящая система КМ — КУШ-1 стрелка К (см. рис. 9.44) состоит из СДз гироагрегата, СП2 указателя УШ-1. усилителя У1 и двигателя М1 Назначение этой следящей системы — транслировать курс, вырабатываемый следящей системой КМ-ГА в указателе КУШ-1, на стрелку К.
Если на коррекционном механизме не введены величины ∆M и ∆Мусл, то стрелка К указателя КУШ-1 в режиме МК показывает гиромагнитный курс. При введенных значениях ∆M и ∆Мусл стрелка К показывает соответственно истинный и ортодромический курсы.
Стрелка 1 указателя КУШ-1 в режиме МК всей системы и при установке переключателя на КУШ-1 в положение «МК» тоже будет выдавать гиромагнитный курс, а при положениях «АК» и «РК»—соответственно истинный курс от астрокомпаса и магнитный пеленг радиостанции от АРК.
Если переключатель «Коррекция Осн.-Контр.» на пульте управления поставить в положение «Основной», а переключатель режимов работы оставить в положении «МК», то указатель УШ-3 (стрелка К) будет показывать гиромагнитный курс от основного гироагрегата. Контрольный гироагрегат будет работать в режиме ГПК, выдавая на КУШ-1 (стрелка К) ортодромический курс.