

10.3 Инерциальная курсовертикаль икв-72
Инерциальная курсовертикаль ИКВ-72 представляет собой конструктивное объединение курсового гироагрегата и гировертикали, коррекция которой обеспечивается не жидкостными маятниками, а более точными инерциальными методами по сигналам интегральной коррекции.
ИКВ-72 предназначена для использования в пилотажно-навигационных комплексах в качестве датчика курса, крена и тангажа. ИКВ-72 обеспечивает: определение гироскопического курса, тангажа и крена , абсолютного вертикального ускорения; азимутальной угловой скорости; формирование составляющих путевой скорости по двум горизонтальным осям платформы, свободной в азимуте; выработку сигналов «Исправность» курсовертикали, «Готовность» курсовертикали, «Исправность курса» и «Исправность вертикали».
В комплект ИКВ-72 входят: гиростабилизированная платформа, усилители БУ-25, БУ-26, БУ-27, У-П2 и генератор напряжении, расположенные в герметичной части; блоки встроенного контроля БВК-3 и БВК-4, блок питания БП-33-1, согласующее устройство УС-21, стабилизатор напряжения и блок запоминающего устройства, расположенные в негерметичной части.
Основные эксплуатационные данные ИКВ-72:
погрешность измерения ψг в диапазоне O...36O0 (режим «Свободной в азимуте» платформы) — 0,3 °/ч;
погрешность выдерживания вертикали за 1 ч работы — 0,5°;
погрешность определения абсолютного вертикального ускорения — 1%;
погрешность измерения составляющих абсолютной скорости по двум горизонтальным осям гироплатформы за 1 ч работы — 80 м/с.
Время готовности с момента подачи питания не более 10 мин в любых эксплуатационных условиях. Курсовертикаль выполнена в виде самостоятельной функциональной системы.
Гироскопическая платформа обеспечивает положение осей чувствительности акселерометров в заданных направлениях относительно Земли и выдает данные об угловых положениях ЛА в виде сигналов датчиков, в качестве которых используются синусно-косинусные вращающиеся трансформаторы (СКТ).
Блок усилителей БУ-25 усиливает сигналы гироскопической стабилизации платформы по трем основным осям, обеспечивает работу следящей системы внешней рамы крена, участвует в начальной выставке платформы в плоскости горизонта и в азимуте, контролирует работоспособность канала стабилизации и внешней рамы и выдает сигнал отказа.
Блок усилителей БУ-26 усиливает сигналы с акселерометров по напряжению, интегрирует их и перед подачей на датчики моментов усиливает по мощности.
Блок усилителей БУ-27 служит для предварительного усиления сигналов с датчиков углов гироскопов и акселерометров. Усилитель электрической пружины У-178 предназначен для работы в системе межрамочной коррекции курсового гироскопа Г2.
Блоки встроенного контроля БВК-3 и БВК-4 обеспечивают контроль работы курсовертикали, переключение режимов работы и выдачу сигналов ее состояния.
Генератор ГН-14 вырабатывает питание для гиромоторов, обмоток возбуждения датчиков углов гироскопов и акселерометров.
Блок питания БП-33-1 выдает вторичное питание усилителям курсовертикали при использовании в качестве основного источника 115 В, 400 Гц с резервированием от +27 В на случай кратковременного пропадания напряжения.
Согласующее устройство УС-21 развязывает выходы крена, тангажа и курса.
Стабилизатор напряжения выдает опорное напряжение +10 В.
Блок запоминающего устройства компенсирует постоянную составляющую скорости дрейфа курсового гироскопа.
Основным устройством ИКВ-72 является пространственная четырехрамочная гиростабилизированная платформа (рис. 10.4). Она представляет собой трехосный гиростабилизатор с дополнительной следящей рамой, которая обеспечивает невыбиваемость платформы при любых эволюциях ЛА. Кардановый узел платформы состоит из рамы внутреннего крена, рамы тангажа, следящей рамы и собственно платформы, на основании которой расположены два гироскопа типа ГВК-3 и три акселерометра типа ДА-10. Гироскоп Г1 с вертикально расположенным вектором кинетического момента Н1 обеспечивает стабилизацию по осям крена и тангажа, т. е. выполняет роль датчика гировертикали. Гироскоп Г2 с горизонтально расположенным вектором кинетического момента Н2 обеспечивает стабилизацию в азимуте, т. е. является датчиком курсового гироагрегата. Платформа подвешена к раме внутреннего крена на радиальных шариковых подшипниках.
Гироскоп типа ГВК — динамически настраиваемый с внутренним карданом и двухфазным гистерезисным двигателем. Он имеет две пары полюсов. Синусно-косинусные трансформаторы СКТ ψ, СКТ υ и СКТ γ являются датчиками угловых отклонении ЛА относительно гиростабилизированной платформы и крепятся на осях вращения рам с одной стороны. С другой стороны осей крепятся безредукторные датчики моментов типа ДМ-5, обозначаемые на рис. 10.3 ДС.
Рассмотрим процесс стабилизации в азимуте относительно оси Оε. При возникновении внешнего возмущающего момента Mε гироскоп Г2 начнет прецессировать и с датчика угла Ду1 через усилитель выдается сигнал на датчик моментов ДмЗ. Последний разовьет момент, равный моменту Mξ, но противоположный по знаку, и гироплатформа будет стабилизирована по углу ψ. Для невыбиваемости платформы, которая обеспечивается перпендикулярностью рам крена и тангажа, предусмотрена следящая система внешней рамы крена, состоящая из СКТ Yвн усилителя внешней рамы УВР и датчика моментов Дс4.
Для стабилизации платформы в плоскости горизонта при любых углах поворота ЛА в азимуте предусмотрен преобразователь координатный ПК, установленный на вертикальной оси карданова подвеса. Он является распределителем сигналов с датчиков углов гироскопа Г1 через соответствующие усилители У1 и У2 на двигатели стабилизации Ml и М2 в зависимости от углов поворота платформы в азимуте.
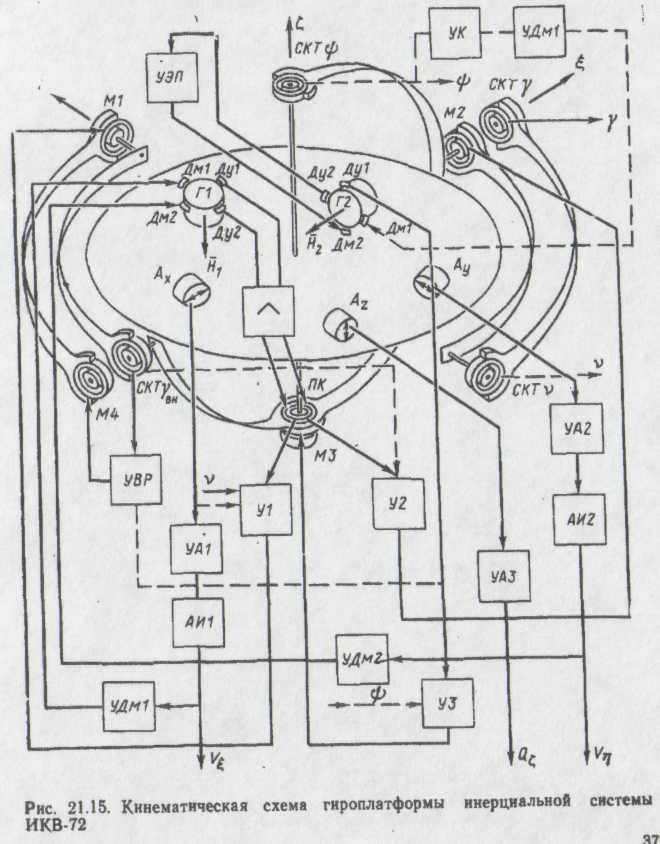
Рис.10.4 Кинематическая схема гироплатформы инерциальной системы ИКВ-72
Акселерометр ДА-10 маятникового типа в «сухом» исполнении с индукционным датчиком углов и катушкой обратной связи, на которую подается напряжение постоянного тока, вырабатывает сигналы, пропорциональные измеряемому ускорению. Акселерометры установлены на платформе так, что их оси чувствительности образуют трехгранник OXYZ. Акселерометры Ах и Ау выдают сигналы, на основе которых определяются составляющие абсолютной скорости ЛА; акселерометр Аz служит для выдачи сигнала, пропорционального вертикальному ускорению ЛА. В акселерометре (рис. 10.5) маятник 2, укрепленный на цапфах в опорах 1, под действием инерционных сил перемещается вдоль оси чувствительности вместе с роторной катушкой индукционного датчика угла 3 относительно статорных катушек 4. Вследствие этого в роторной катушке будет наводиться ЭДС, значение которой пропорционально перемещению маятника, а ее фаза зависит от направления перемещения. Эта ЭДС поступает в усилитель БУ-27, где предварительно усиливается, и далее на усилитель БУ-26, с выхода которого подается в виде напряжения постоянного тока на обмотку катушки обратной связи 6. Магнитное поле, возникающее вокруг катушки обратной связи, взаимодействует с полем постоянного магнита 5, укрепленного на корпусе. В результате этого взаимодействия создается сила, противодействующая инерционной силе маятника. При равновесии этих сил значение тока в катушке обратной связи будет пропорционально ускорению платформы, а направление тока определяется знаком ускорения. Для выработки составляющих интегральной коррекции гироплатформы и абсолютной скорости полета ЛА (см. рис. 10.4) сигналы акселерометров Ах и Аy подаются на аналоговые интеграторы АИ1 и АИ2.
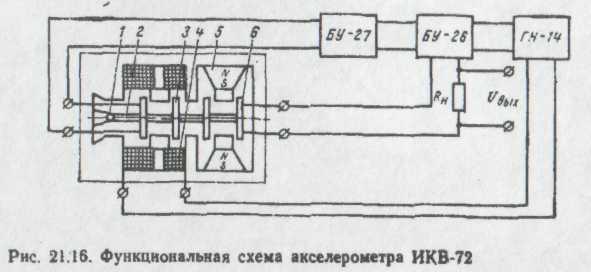
Рис 10.5 Функциональная схема акселерометра ИКВ-72
Интеграторами являются усилители постоянного тока с большим коэффициентом усиления, охваченные емкостной обратной связью (рис. 10.6). Они работают в двух режимах при подаче сигналов: «Готовность» — в режиме интегратора; «—15 В ТВ», определяющего начало точной выставки платформы, — в режиме апериодического усилителя с большим коэффициентом усиления ky = R3/R1. Переключение режимов происходит с помощью МОП-ключа, находящегося в элементе схемы Э1. В режиме интегратора сигнал акселерометра снимается с резистора Rи, и поступает на вход 1 интегратора АИ, в режиме усилителя емкость С шунтируется резистором R3 и на вход усилителя идет сигнал после первого каскада усиления блока БУ-26.
Рассмотрим режимы работы системы ИКВ-72. При включении питания на курсовертикаль подаются: переменное однофазное напряжение 115В, 400 Гц, постоянное напряжение 27В, переменное трехфазное напряжение 36 В, 400
Гц. При этом блоками встроенного контроля БВК-3 и БВК-4 вырабатываются сигналы «Исправность». «Исправность курса» и «Исправность вертикали», поступающие в навигационный комплекс, и происходит автоматическая подготовка курсовертикали к работе, которая состоит из двух этапов: ускоренный выход (УВ) платформы в горизонт и в азимуте и точная выставка (ТВ) платформы.
.
Рис 10.6 Схема интегратора акселерометра
Этап УВ обеспечивает быстрое согласование платформы относительно корпуса курсовертикали. Для этого в каналах крена, тангажа и курса на рис. 10.7 показана схема канала крена, остальные схемы аналогичны. С помощью реле Р2 и Р1 на роторные обмотки СКТ γвн, СКТ # и СКТ Ч> подается питание 20 В, 12 КГц вместо 36 В, 400 Гц рабочего режима. Сигналы с синусных обмоток статоров СКТ γвн и CKTψ , где связи обозначены пунктирными линиями, идут на усилители стабилизации У2 и УЗ и далее на двигатели ста билизации М2 и МЗ, которые разворачивают платформу так, чтобы обнулить сигналы с синусных обмоток ротора. Сигнал с синусной обмотки СКТ суммируется в усилителе стабилизации У1 с сигналом акселерометра Ах. В результате Ml отрабатывает раму тангажа так, чтобы сигнал с акселерометра Ах был минимальным. Усилитель УВР на этапе УВ получает сигнал от СКТ γвн и акселерометра Ау, заставляя внешнюю раму с помощью двигателя
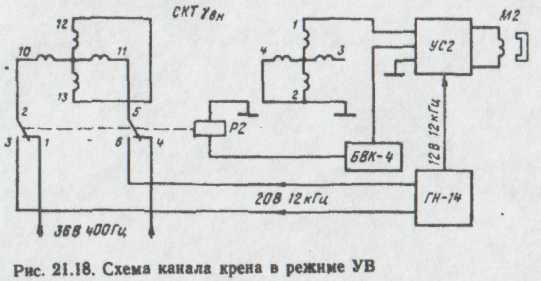
Рис 10.7 Схема канала крена УВ.
стабилизации М4 принять согласованное положение. Этап ускоренного выхода платформы длится около 1 мин, после чего по сигналу с БВК-4 начинается радиальная коррекция платформы или режим точной выставки. Одновременно с началом радиальной коррекции начинает работать гироскопическая стабилизация, описанная выше.
В режиме радиальной коррекции (рис. 10.8) с БВК-4 выдается сигнал «—15В ТВ» и сигналы с датчиков акселерометров Ах и Av поступают на аналоговые усилители интеграторов, в которых отключена обратная связь, т. е. оси работают в качестве апериодических усилителей, После усиления сигналы поступают на датчики моментов Дм1 и Дм2 гироблока П. Последний заставляет прецессировать платформу с акселерометрами к положению, перпендикулярному вектору кажущейся скорости, который равен сумме векторов ускорения от силы тяжести и ускорения, определяемого изменением величины и направления скорости движения ЛА.
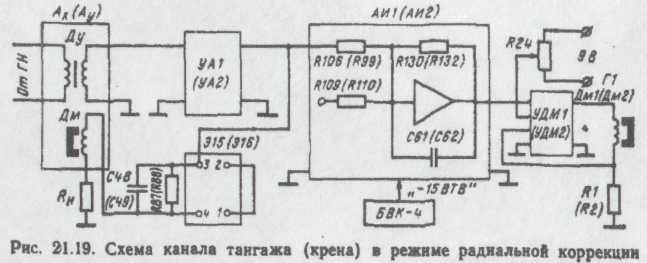
Рис 10.8 Схема канала тангажа(крена) в режиме радиальной коррекции.
При этом в канале курса (см. рис. 10.4) сигналы с синусной обмотки СКТ ψ последовательно подаются на усилитель УК и усилитель датчика моментов Дм1 гироскопа Г2. В итоге платформа стабилизируется по азимуту согласно произвольно направленному вектору кинетического момента Н2, гироблока Г2. Радиальная коррекция заканчивается тогда, когда сигналы с акселерометров близки к нулю. В результате реализации этого режима измерительные оси акселерометров будут находиться в горизонтальной плоскости с точностью до 3'. Для выработки сигнала «Готовность» сигналы с акселерометров поступают в БВК-3 (рис. 10.9, а), где обеспечивается контроль цепей коррекции.

Рис 10.9 Функциональные схемы контроля БВК-3:
а-контроль цепей коррекции и выдача сигнала (Готовность), б-контроль блока питания по напряжению +5В, в- конроль напряжения генератора ГН-14, г- контроль работы СКТ.
Этот контроль производится по условию, что сумма квадратов выходных сигналов коррекции должна быть равна квадрату напряжения U0, соответствующего угловой скорости вращения Земли, т. е.
![]() (10.7)
(10.7)
При выполнении условия (10.7) БВК-3 выдает сигнал «Готовность» и с помощью БВК-4 производится переключение работы курсовертикали в рабочий режим. В рабочем режиме, курсовертикаль свободна в азимуте, так как ССКТ ψ отключен от усилителя УС. В горизонтальной плоскости платформа удерживается с помощью сигналов интегральной коррекции, т. е. с помощью гироскопа Г1 (см. рис. 10.4), на который накладываются моменты коррекции, пропорциональные интегралам от горизонтальных составляющих абсолютных ускорений акселерометров Аx, и Аy. Причем параметры контура коррекции «акселерометр—интегратор—гироскоп» выбраны так, что он имеет период Шулера, равный 84,4 мин.
Компенсация постоянной составляющей скорости дрейфа курсового гироскопа обеспечивается блоком запоминающего устройства. Принцип действия этого устройства заключается в том, что в режиме «Настройка» при скорости ЛА, равной нулю, на его вход поступают напряжение, пропорциональное угловой скорости вращения Земли Uo, и напряжение Uo + Δ, где Δ — величина дрейфа курсового гироскопа, определяемая из выражения (10.8). На компараторе запоминающего устройства происходит сравнение этих напряжений и определение Δ, которое преобразуется в двоичный параллельный код и запоминается в рассматриваемом блоке. При переходе курсовертикали к рабочему режиму сигнал компенсации постоянной составляющей скорости дрейфа курсового гироскопа в виде постоянного напряжения подается на соответствующий датчик моментов Дм2 до следующего режима «Настройка».
Курсовертикаль имеет специфичный встроенный контроль, который не только контролирует параметры курсовертикали, обнаруживает ее основные неисправности во время предстартовой подготовки и в полете, но и обеспечивает управление режимами ее работы. Основными блоками курсовертикали, обеспечивающими встроенный контроль и выработку сигналов для переключения режимов работы, являются блоки БВК-3 и БВК-4. К особенностям встроенного контроля, обеспечивающего работу курсовертикали, относятся следующие: фиксируются и запоминаются все наиболее вероятные неисправности системы; характеристики элементов встроенного контроля не снижают общей надежности курсовертикали; контроль полностью независим от внешней информации; какая-либо неисправность приводит к снятию сигнала «Исправность», индицируемому в навигационный комплекс (в частности, в БСКВ) по каналу работы конкретной курсовертикали.
БВК-3 предназначен для формирования сигналов отказов блока питания, блока генераторов, CKT ψ, СКТ υ и СКТ γ. Для контроля работы СКТ должно обеспечиваться следующее условие:
![]() (10.8)
(10.8)
Сигнал с синусной обмотки СКТ у более 0,8В приводит к выдаче сигнала отказа.
Сигналы отказов, формируемые БВК-3, подаются на БВК-4. Туда же поступают сигналы с датчиков отказов БУ-26, блока питания при кратковременном отключении напряжения +27В и +15В и т. д. С помощью логических элементов временной задержки и управляющих реле в БВК-4 формируются сигналы состояний ИКВ: «Исправность вертикали», «Исправность курса», «Исправность», «Готовность» и сигналы, обеспечивающие реализацию режимов. При наземной подготовке курсовертикали системы встроенного контроля выдают информацию об ее состоянии и прохождении всех подготовительных режимов. По сигналу «Готовность» курсовертикаль переводится в рабочий режим. Общий отказ системы и отказы блока питания, генератора ГН-14, системы стабилизации, системы коррекции выдаются на соответствующие сигнализаторы отказов, которые хранят информацию об отказе даже после выключения питания курсовертикали. Сигналы отказов блоков и неисправных цепей можно проконтролировать через контрольный штепсельный разъем.