

10.4 Инициальная система и-11
Инерциальная система И-11, применяемая на самолете Ил-62, является полуаналитической ИНС со свободной в азимуте ориентацией осей. Эта система автономная и позволяет решать задачи самолетовождения.
Инерциальная система И-11 обеспечивает:
-автономное или совместно с системой автоматического управления выполнение полета по маршруту в соответствии с программой, введенной в нее перед полетом или в полете (программируется до девяти участков маршрута);
-непрерывное автоматическое вычисление и индикацию текущего места ЛА в географической (φ и λ) и ортодромической (φ0, λо) системах;
-формирование и индикацию заданного путевого угла (ЗПУ) и бокового уклонения ΔZ от заданного направления маршрута;
-формирование и индикацию путевой скорости Vn и угла сноса (УС)
-определение и индикацию времени полета Т и оставшегося расстояния Soc до очередного промежуточного пункта маршрута (ППМ);
-определение и индикацию путевого угла (ПУ) и истинного курса ψ;
-вычисление и индикацию направления δв и скорости (U) ветра;
-ручную коррекцию частноортодромических координат места ЛА;
-индикацию географических координат и номеров ППМ введенных в систему, индикацию показателя готовности системы к работе, сигналов компенсации уходов гироскопов и составляющих путевой скорости VпN и VпE в цифровой форме.
Входными сигналами И-11 являются ИВС V и абсолютная высота Набс, выдаваемые СВС.
В И-11 входят (рис. 10.10) гироскопическая платформа ПГ-1В-11, блок электроники БЭ-3, блок автоматики БА-20, блок специализированного питания БСЛ-5, пульт управления ПУ-36, цифровой вычислительный комплекс ЦВК и аккумуляторная рама Р-3.
В свою очередь, ЦВК состоит из устройства ввода индикации УВИ, аналого-цифрового блока связи АЦБС и специализированного вычислительного устройства СВУ.
В кабине Экипажа размещены: ПУ-36, УВИ переключатель «Управление от И-11», кнопка «Сброс отказа И-11», светосигнальное табло «Управл. от И-11».
Погрешность определения текущих географических координат φ и λ за 7 ч работы системы И-11 составляют: по боковому 37 км по дальности 46 км. Время готовности системы при температуре окружающей среды +20 °С не более 35 мин.
Основные блоки системы. Гироскопическая ПГ-1В-11 обеспечивает положение осей чувствительности акселерометра в заданных направлениях относительно Земли и формирует с помощью акселерометров для ЦВК сигналы ах, ау и az, пропорциональные ускорениям, действующим на платформу, выдает данные об угловых положениях ЛА в виде сигналов с датчиков углов Дух, Дуу, Дуz на блок БЭ-3 и в режиме «Курсовертикаль» вырабатывает сигналы тангажа υ и крена γ ЛА.
Блок электроники БЭ-3 осуществляет усиление сигналов с датчиков углов Дух, Дуу и Дуz в каналах стабилизации по курсу, тангажу и крену и выдачу управляющих сигналов на двигатели стабилизации ψ, υ, γвн, γнар , а также арретирование и термостабилизацию гироскопов, платформы и собственно блока электроники.
Блок автоматики БА-20 интегрирует сигналы акселерометров ах, ау и аz и преобразует их в импульсы Qx, Qy и Qz, воспринимаемые ЦВК, преобразует управляющие сигналы ЦВК и выдает на датчики моментов гироскопов сигналы, пропорциональные угловым скоростям ωх, ωy и ωz, а также обеспечивает прохождение режимов «Выставка», «Навигация», «Курсовертикаль» и встроенный контроль исправности гироплатформы. Цифровой вычислительный комплекс ЦВК на основе информации, получаемой в различных датчиков, на основе жесткой программы вычислений обеспечивает предполетную подготовку и работу системы И-11, решение задач самолетовождения с высокой точностью и контроль работы системы.
Аналого-цифровой блок связи АЦБС обеспечивает преобразование исходных данных, поступающих с блока УВИ и аналоговых датчиков системы, в код и выдает их для последующих вычислений в блок СВУ, преобразование кодовой информации с выхода СВУ в аналоговые сигналы и для ее индицирования на УВИ.
Специализированное вычислительное устройство СВУ на основании исходных данных и жесткой программы непосредственно решает задачи самолетовождения и обеспечивает работу системы И-11.
Устройство ввода и индикации УВИ позволяет набирать и вводить исходные данные и индицирует навигационные параметры.
Пульт управления ПУ-36 обеспечивает включение системы, управление режимами работы и методами выставки платформы и также дает возможность определить состояние системы.
Блок специализированного питания БСП-3 вырабатывает специализированное питание, необходимое для обеспечения работоспособности системы.
Аккумуляторная рама Р-3 является аккумуляторной батареей, которая обеспечивает непрерывность питания И-11 постоянным током напряжением 27В и исключает снижение питающего напряжения ниже +27 В. Время работы системы аккумулятора не более 1 мин. Основой И-11 является пространственная гиростабилизированная четырехрамочная платформа ПГ-1В-11. Основным достоинством такой схемы являются: большие углы прокачки платформы и рам, компактность и жесткость самой платформы. Платформа установлена на ЛА так, как показано на рис. 10.11. Наружная рама /, ось 0Y которой ориентирована вдоль строительной оси ЛА, называется рамой наружного крена. Рама 2, ось вращения ОХ которой перпендикулярна оси 0Y, называется тангажной. Следующая рама 3 — внутреннего крена. Рама 4, ось 0Z вращения которой перпендикулярна осям ОХ и ОY, — рама курса. На платформе П, связанной с рамой курса, размещены два трехстепенных астатических гироскопа Г1 и Г2 типа ГПА-20 и три акселерометра Ах, Аy, Аz типа ДА-1. В качестве датчиков угловых отклонений ЛА относительно положения платформы используются синусно-косинусные трансформаторы СКТ ψ, СКТ υ и СКТ γ с двухступенчатым отсчетом углов (грубый и точный - на рис. 21.8 СКТ с точным отсчетом углов обозначен звездочкой).

Рис 10.10. структурная схема инерциальной систему И-11
Акселерометры установлены так, чтобы их оси чувствительности были взаимно перпендикулярны и образовали трехгранник OXYZ. Акселерометры Ахи Ау выдают информацию для решения навигационных задач, Аг служит для выдачи сигналов, пропорциональных вертикальному ускорению. Ось кинетического момента Н2 гироскопа Г2 (восточного) ориентирована на оси ОХ, ось кинетического момента Н1, гироскопа Г1 (северного) ориентирована по оси ОY. Гироскоп П прецессирует относительно осей ОХ и ОZ, а Г2 — относительно осей ОY и ОZ.
Стабилизация рам карданова подвеса осуществляется с помощью следящих систем. На осях рамок гироскопов установлены датчики моментов Дм. При подаче на них сигналов, формируемых ЦВК, образуются управляющие моменты Мynp, приложенные к гироскопам по определенным осям. Под их действием гироскопы прецессируют и выдают сигнал с индукционных датчиков угла Ду через усилители стабилизации платформы УСП на двигатели отработки.
Под их действием платформа отслеживает направление векторов кинетических моментов Нх и Ну гироскопов. Стабилизация платформы в пространстве осуществляется раздельно по каждой оси ее карданова подвеса.
При эволюциях ЛА оси υ и γвн меняют свое положение в пространстве и поэтому между датчиками угла Дух, Дуy и следящими системами γвн и υ имеется преобразователь координат ПК ψ, связанный с осью ψ и распределяющий сигналы в зависимости от значения угла ψ.
Таким образом, гиростабилизированная платформа ориентирует оси чувствительности акселерометров в горизонтальной системе координат OXYZ со свободной в азимуте ориентацией осей. Особенность такой системы состоит в том, что проекции угловой скорости трехгранника OXYZ на ось OZ, совпадающей с осью 0Zг, географической системой координат, равны нулю,

Рис 10.11 кинематическая схема гироплатформы инерциальной системы И-11

Рис 10.12 Канал арретирования инерциальной системы И-11
т. е. оси ОХ и 0Y платформы не вращаются вокруг оси 0Z относительно инерциального пространства. Применение этой системы координат позволяет избавиться от основного недостатка ИНС с географической системой координат —резкого увеличения ошибок при полетах Л А в высоких широтах, когда составляющие ускорений, пропорциональные tgφ, быстро нарастают. Рассматриваемая платформа имеет еще одну особенность. Физическое моделирование осей трехгранника OXYZ осуществляется гироскопами Г1 и Г2, поэтому оси их кинетических моментов должны быть строго перпендикулярны. Для этого применяют канал арретирования, представленный на рис. 21.9. На вход усилителя арретирования Уар с датчика Дуz подается сигнал рассогласования между азимутальной осью гироскопа Г2 и азимутальной осью платформы. С выхода усилителя сигнал поступает на Дмωz2 и заставляет гироскоп Г2 прецессировать в азимуте до тех пор, пока не будет обеспечена перпендикулярность кинетических моментов. Гироскоп ГПА-20 является поплавковым астатическим гироскопом с трехфазным синхронным гистерезисным гиромотором
ГСМ-1Б. Акселерометр ДА-1 относится к чувствительным элементам маятникового поплавкового компенсационного типа, принцип действия которого основан на измерении инерционного момента с помощью электрической пружины.
Связь блоков, входящих в состав ЦВК, представлена на рис. 10.13. После подачи питания и команды с ПУ-36, определяющей подрежим подготовки системы к полету в режиме «Выставка», нажатием соответствующих кнопок наборного поля УВИ вводятся исходные параметры и координаты. Вместе с этим в ЦВК поступают сигналы, пропорциональные приращению скорости и гироскопическому курсу. На основании полученной информации ЦВК вычисляет и выдает управляющие сигналы и команды, которые обеспечивают функционирование И-11. По мере готовности системы на УВИ индицируется показатель готовности и выдается команда «Готовность». В режиме «Навигация» ЦВК вычисляет и выдает навигационные параметры, индицируемые на УВИ, и сигналы, обеспечивающие функционирование системы. В наземном режиме «Контроль системы» ЦВК вычисляет расчетные координаты и сравнивает их с фактическими, выдавая в случае необходимости команду «Неисправность». СВУ является цифровым вычислителем с жесткой программой с двоичной системой кодирования чисел и команд.
Режимы работы системы И-П. В системе И-11 предусмотрены следующие режимы работы: обогрев, выставка, навигация, контроль, Курсовертикаль. Переключение режимов производится подачей соответствующих команд с ПУ-36.
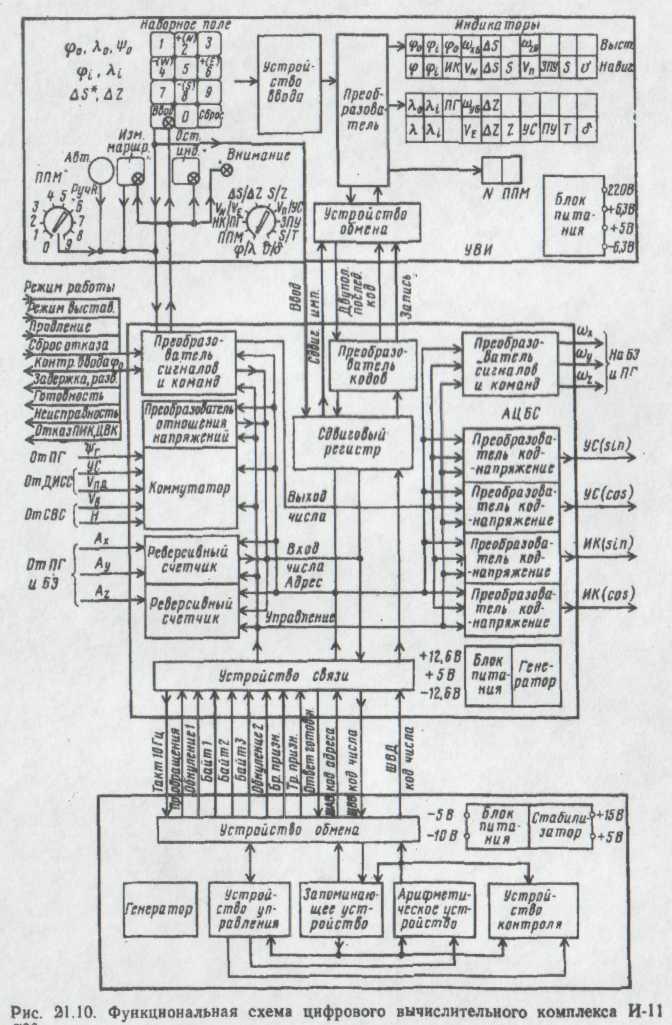
Рис 10.13 Функциональная схема цифрового вычислителя комплекса И-11
Режим «Обогрев». Этот режим предназначен для создания определенных температурных условий работы блоков и элементов системы. В гироплатформе применяется обогрев и термостатирование гироскопов в диапазоне 7О...75°С, а также акселерометров и элементов блоков БА-20 и БЭ-3. Режим «Обогрев» производится перед режимом «Выставка» или одновременно с ним. При одновременном проведении этих режимов вначале включается режим «Обогрев», а затем при достижении температуры гироскопов (20 ± 5)°С происходит автоматический переход на режим «Выставка». Система термостатирования работает во всех последующих режимах.
Режим «Выставка», Назначение режима «Выставка»: горизонтирование платформы ПГ-1В-11, т. е. приведение осей чувствительности акселерометров и гироскопов в плоскость горизонта; определение ориентации осей чувствительности акселерометров и гироскопов относительно меридиана, т. е. определение начального азимутального угла платформы φ0 (аналитическое гирокомпасирование); компенсация начального дрейфа платформы, причем полностью или частично. Режим «Выставка» определяется командой «Выставка» с ПУ-36 и командой «Вкл. система», формируемой в ПГ-1В-11 при достижении температуры гироскопов (20 ± 5) °С. При этом на систему поступают напряжения: 27 В; 200 В, 400 Гц; 36 В, 400 Гц и специализированные напряжения, вырабатываемые блоком БСП-5.
В И-11 предусмотрено три режима выставки: одинарное гирокомпасирование, двойное гирокомпасирование и выставка по заданному курсу. Процесс выставки производится автоматически и по мере прохождения ее этапов на УВИ высвечивается цифровое значение сигнала «Признак готовности» (ПГ), соответствующее каждому этапу.
Одинарное гирокомпасирование является основным видом выставки и состоит из трех подрежимов: грубая выставка, горизонтирование и выставка в азимуте или гирокомпасирование.
В подрежиме «Грубая выставка» происходит разгон гироскопов и осуществляется предварительное ориентирование платформы по сигналам СКТ-датчиков углов ψ, υ, γ (см. рис. 10.11). Сигналы с СКТ через усилители стабилизации платформы (УСП) блока БЭ-3 поступают на двигатели отработки Mψ, Мυ, Mγ, которые ликвидируют углы рассогласования между осями ЛА 0XgYgZg и осями платформы OXYZ. Во время прохождения подрежима «Грубая выставка» на УВИ высвечивается значение ПГ «90». По окончании этого режима выдается команда «Горизонтирование» и на индикаторе УВИ появляется цифра «80».
Подрежим «Горизонтирование» осуществляет установку платформы в плоскость горизонта по сигналам акселерометров. При этом задействованы три измерительные цепи (рис. 10.14).

Рис 10.14 измерительные цепи, реализующие подрежим «горизонтирование»
Согласно рис. 10.14 акселерометры, расположенные на платформе, при неподвижном ЛА выдают сигналы, пропорциональные углу отклонения платформы от плоскости горизонта. Эти сигналы ах и а„ через усилители датчиков моментов УДму УДмх поступают на датчики моментов Дму и Дмх, под действием которых гироскопы прецессируют и выдают сигналы с датчиков углов Дуу и Дух. Эти сигналы через УСП подаются на двигатели следящих систем платформы, которые разворачивают ее до тех пор, пока не произойдет выставка платформы в плоскость горизонта. При этом сигналы с СКТ отключены. При несовпадении оси OY платформы со строительной осью ЛА 0Хg сигнал с СКТ ψ поступает на фазочастотный выпрямитель (ВФЧ) и датчик моментов Дмг гироскопа Г1, который начинает прецессировать. Его сигнал с Дуz1 через УСП подается на двигатель Mψ, который отрабатывает платформу в азимуте до совмещения оси 0Y платформы с осью OXg ЛА.
Подрежим «Гирокомпасирование» начинается после окончания подрежима «Горизонтирование» и осуществляется с помощью ЦВК-В И-11 управление азимутальной осью гироплатформы аналогично управлению азимутальной осью любого гироагрегата курсовой системы, т. е. угловая скорость ее движения в азимуте устанавливается равной угловой скорости вращения Земли для текущей широты местонахождения ЛА. Но реализовано оно с помощью более точных датчиков и аналитических расчетов на цифровом вычислительном устройстве. Задача гирокомпасирования — вычисление начального азимутального угла платформы ψ0 (рис. 10.15).
Процесс подрежима «Гирокомпасирование» разбит на два этапа: грубое и точное гирокомпасирование. Прежде чем перейти к рассмотрению этих этапов,
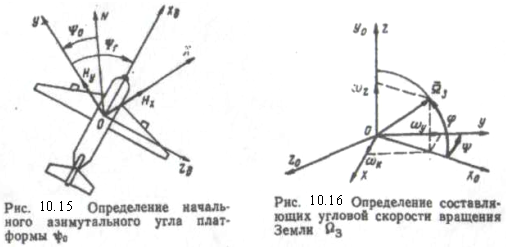

Рис 10.17 Схема цифровой выставки платформы в азимуте
необходимо выяснить физические процессы происходящие при гирокомпасировании платформы. Считаем что платформа установлена на неподвижном ЛА, находящемся в точке О на широте ψ (рис. 10.16). Платформа выставлена в плоскость горизонта и повернута в азимуте вокруг оси 0Z на угол ψ. Вектор угловой скорости Ω3 суточного вращения Земли направлен по оси мира, наклоненной к плоскости горизонта на угол φ. Тогда составляющая ωx угловой скорости вращения платформы вместе с Землей будет
![]() (10.9)
(10.9)
Поворот платформы вокруг оси ОХ с угловой скоростью ωx вызывает соответствующий наклон платформы на угол β. Так как на платформе установлен акселерометр, ось чувствительности которого направлена вдоль оси OY, то он будет фиксировать составляющую кажущегося ускорения акy — gβ, которая пропорциональна β, а значит, и величине ωx, или азимутальному отклонению платформы ψ0. На этом и построено определение неизвестного ψ0 на месте стоянки ЛА при запуске И-11.
В блок-схеме цифровой выставки платформы в азимуте (рис. 10.17) сигналы с датчиков поступают на компенсационный интегрирующий преобразователь (ПИК) и затем в виде импульсов подаются на ЦВК, где проходят звено динамической коррекции (ЗДК), умножаются на коэффициент передачи k2/a и сравниваются с расчетными составляющими угловой скорости вращения Земли Ω3. С ЦВК сигналы поступают на соответствующие датчики моментов платформы. Так как азимутальный угол выставки платформы ψ0 вначале не известен, то принимают ψ0 = 0 и вводят значения составляющих угловой скорости Земли, рассчитанные на основе этой величины. Вычисленные по формулам согласно блок-схеме сигналы угловых скоростей
 (10.10)
(10.10)
и поданные на датчики моментов вызовут видимый уход платформы, так как истинный ψ0=^ψ0. Этот уход вырабатывает сигналы с акселерометров, которые после интегрирования на ПИК определяют величины скоростей Vx и Vy, зависящие от ψ0. С целью повышения точности определения Vx и Vy после переходных процессов их осредняют:
 (10.11)
(10.11)
Время осреднения Тоср = 200 с. При этом на УВИ высвечивается значение ПГ «60». На основе вычислений (10.11) производят расчет азимутального угла в первом приближении
![]() (10.12)
(10.12)
Погрешность такого определения Δψ0 = 3°. По найденному ψ0 уточняют составляющие угловой скорости вращения Земли и вводят в систему. На УВИ высвечивается значение ПГ «50», которое с учетом переходных процессов длится 75 с.
Этап точного гирокомпасирования характеризуется уменьшением коэффициентов передачи и, как следствие, увеличением переходных процессов. Азимутальный угол ψ0 непрерывно уточняется по формуле
 (10.13)
(10.13)
При уточнении значения ψ решаются уравнения (10.10). В момент начала точного гирокомпасирования высвечивается значение ПГ «40», которое индицируется в течение 4мин. При окончании этого этапа значения ПГ уменьшаются и достигают «0»...«10».
Завершающий этап этого подрежима — балансировка горизонтальных осей платформы. Описанный процесс одинарного гирокомпасирования происходит при балансировочных сигналах по горизонтальным осям ОХ и OY, оставшихся в памяти у вычислителя от последнего двойного гирокомпасирования. Изменение дрейфа гироскопов с течением времени по отношению к дрейфу, определенному при последнем двойном гирокомпасировании, вызывает нескомпенсированный уход гироплатформы.
Балансировка азимутальной оси OZ осуществляется в течение всего времени предыдущего этапа. Балансировка горизонтальных осей ОХ и 0Y производится с учетом предыдущего определения балансировочных сигналов после завершения этапа гирокомпасирования. Вычисление балансировочных сигналов проводится с помощью СВУ на основе определенных зависимостей. Но при одинарном гирокомпасировании при наличии ошибки Δψ0, удается скомпенсировать только северную составляющую дрейфа гироплатформы, восточная составляющая дрейфа остается ненаблюдаемой. Для полной компенсации дрейфа гироплатформы применяют режим двойного гирокомпасирования.
Виды выставки и двойное гирокомпасирование. Они включают в себя следующие подрежимы: грубая выставка, горизонтирование, дополнительное гирокомпасирование, развороты, основное гирокомпасирование. Содержание и проведение этих подрежимов не отличаются от описанных выше. На этапе «Дополнительное гирокомпасирование» производится гирокомпасирование платформы, повернутой в азимуте на 90° по часовой стрелке относительно основного ее положения. Эта дополнительная операция позволяет скомпенсировать ненаблюдаемую восточную составляющую дрейфа платформы. В результате азимутальный угол ψ0 уточняется и балансировочные сигналы запоминаются до следующего двойного гирокомпасирования.
Вид выставки платформы «Выставка по заданному курсу» используется при наличии информации о стояночном курсе ЛА. Он состоит из следующих подрежимов: грубая выставка, горизонтирование, балансировка.
Азимутальный угол
![]() (10.14)
(10.14)
Режим «Навигация». В этом режиме на основе исходных данных, полученных в результате выставки, введенных начальных условий и измерений чувствительных элементов платформы ЦВК определяет текущие координаты φ и λ, истинный курс ИК, угол сноса УС, путевой угол ПУ и скорость ЛА Vп. ЦВК формирует сигналы на Дм платформы так, чтобы трехгранник OXYZ был бы со свободной в азимуте ориентацией осей ОХ и OY. Алгоритм решения задач навигации разработан с учетом использования модели Земли в виде эллипсоида Красовского.
В системе предусмотрена коррекция параметров φ, λ, S0CT, Z при ручном вводе ΔS и ΔZ. Эта коррекция проводится по следующему алгоритму:
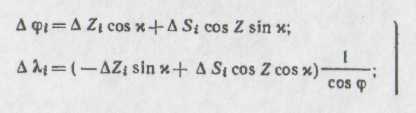
 (10.15)
(10.15)
где χ —угол между географическим и частноортодромическим меридианами;
ΔZi, ΔSi — поправки при i-й ручной коррекции, получаемые как разность между показаниями системы И-11 и системы, по которой производятся коррекция.
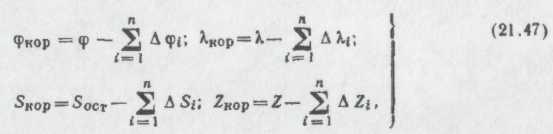
Угол χ вычисляется после смены очередного ППМ. От этого зависят также значения сумм поправок:
 (10.16)
(10.16)
После проведения коррекции всех вышеперечисленных значений определяются S0CT и Z до нового ППМ.
Режим «Контроль». Он обеспечивает автономную проверку системы без подключения контрольно-проверочной аппаратуры. Этот режим состоит из следующих последовательных этапов: начальной выставки системы; подачи на вход ЦВУ сигнала, соответствующего начальному эталонному значению относительной скорости Vпэ; сравнения основных навигационных параметров, вычисленных ЦВУ на основе Vпэ с эталонными значениями, заложенными в долговременной памяти СВУ; анализа ошибок параметров и вывода о работоспособности системы.
Во всех режимах, кроме режимов «Обогрев» и «Грубая выставка», система И-11 обеспечивается встроенным контролем работы системы стабилизации платформы, акселерометров, вторичных источников питания и ЦБК. При неисправности перечисленных элементов системы выдается команда «Отказ системы» и сигнал, указывающий место отказа. При отказе ЦВК происходит автоматический переход на режим «Курсовертикаль».