

5.4 Выключатель коррекции вк-90
Назначение и связь с потребителями. Выключатели коррекции ВК-90 отключают цепи жидкостной маятниковой коррекции в авиагоризонте АГР-72А, гировертикалях МГВ-1СК, цепи горизонтальной коррекции в гидроагрегатах ГА-3 (основном и контрольном), следящие системы, связывающие коррекционные механизмы КМ-5 с гироагрегатами ГА-3 или блоками БГМК-2 в курсовой системе ТКС-П2 при разворотах самолета для исключения послевиражной погрешности в показаниях приборов.
На самолете установлены четыре выключателя коррекций ВК-90 № 1 работает в комплекте с МГВ-1СК (рис. 5.9), ВК-90 № 2 работает в комплекте с МГВ-1СК № 2, т. е. с прибором ПКП-1 второго пилота, ВК-90 № 3 работает в комплекте с МГВ-1СК № 3 т. е. с прибором ПКП-1 первого пилота. ВК-90 № 1 и 3 работают также с каналом № 1 системы ТКС-П2, а ВК-90 № 2 и 3—с каналом № 2 ТКС-П2. Выключатель коррекции ВК-90 № 4 работае с резервным авиагоризонтом АГР-72А.
Выключатели коррекции питаются от сети постоянного тока напряжением 27 В и трехфазным током напряжением 36 В частотой 400 Гц от трех независимых сетей: левой, правой и от преобразователя ПТ-500Ц (ПТС-250). Выключатели ВК-90 № 3 питаются от левой сети, № 2—от правой сети, № 1 и 4—от преобразователя ПТ-500Ц (ПТС-250), который, в свою очередь, получаем питание от шины аккумуляторов. При отказе или выключении ПТ-500Ц (ПТС-250) его потребители автоматически переключаются на питание от левой сети.
Принцип действия выключателя коррекции ВК-90 основан на измерении угловой скорости самолета относительно вертикальной оси с помощью двухстепенного гироскопа
.
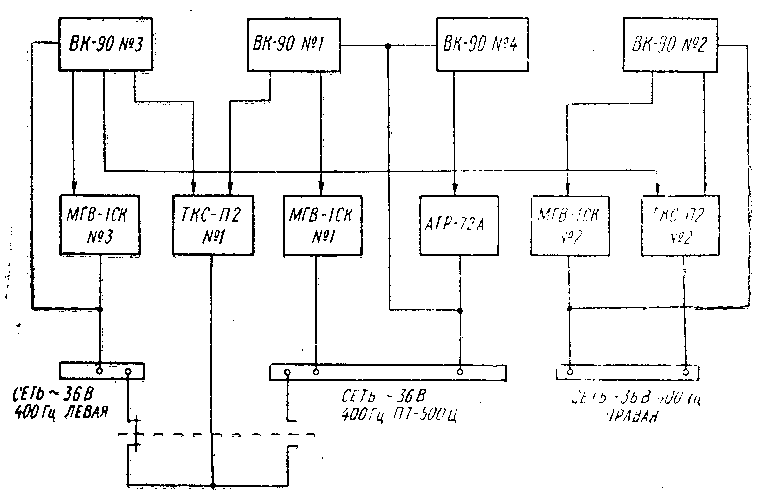
Рис. 5.9, Связь| выключателей коррекции ВК-90 с потребителями.
Прибор состоит из поплавкового (скоростного) гироскопа, системы электронных реле задержки времени и исполнительных реле. Двухстепенный гироскоп заключен в герметичный поплавок, заполненный водородом. Полость между поплавком и корпусом заполнена лигроином, поэтому поплавок взвешен в жидкости, трение в осях сведено к минимуму. В качестве гиромотора установлен электродвигатель, который запитывается трехфазным током 36 В 400 Гц. С поплавком (рамкой) гироскопа связаны магнитная центрирующая пружина, гидравлический демпфер и контакт К включения системы реле задержки времени (рис. 5.9).
Гироскоп в среднем положении удерживается магнитной центрирующей пружиной, которая состоит из ярма, жестко закрепленного на кожухе гироскопа, постоянного магнита и магнитопровода. Колебания гироскопа гасятся гидравлическим демпфером, состоящим из ротора с лопатками и статора. Лопатки ротора перегоняют лигроин из одной полости в другую через щели и демпфируют колебания рамки. При изменении температуры окружающей среды для поддержания постоянной степени демпфирования проходное сечение щелей изменяется перемещением заслонок, связанных с сильфоном. При понижении температуры лигроина вязкость его увеличивается, и сильфон выдвигает заслонки, увеличивая проходное сечение щелей.
Система реле задержки времени обеспечивает отклонение цепей коррекции при минимальных угловых скоростях разворота самолета 15°/с и времени разворота 7-—40 с. Система состоит из релейных усилителей РУ-1 и РУ-2, диодов Д1 и Д2, дополнительного реле Р1 и исполнительного реле Р2.
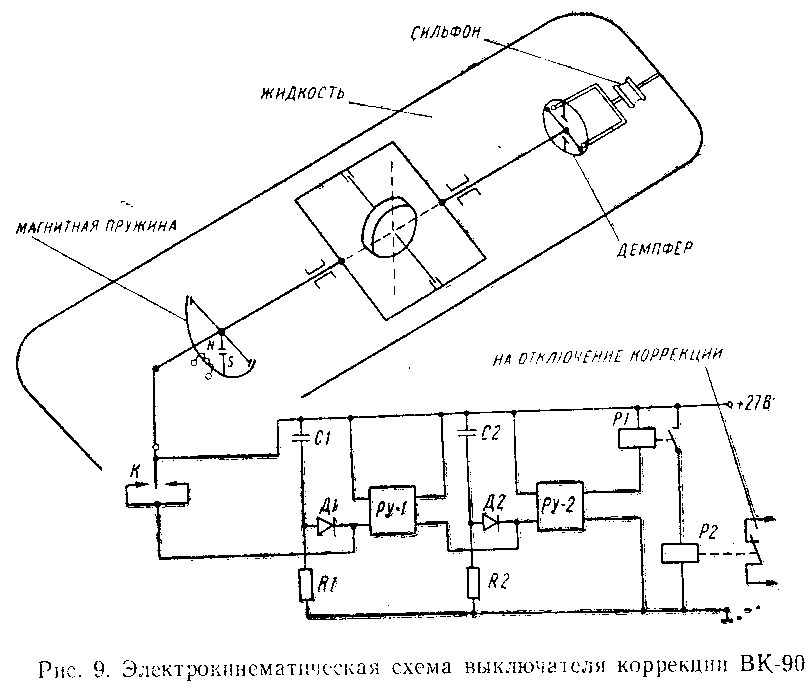
Рис 5.9 Электрокинематическая схема выключателя коррекции ВК-90.
При прямолинейном полете самолета контакт К, жестко связанный с рамой гироскопа, находится в среднем обесточенном положении. При этом конденсатор С1 заряжен, контакты реле релейного усилителя РУ-1 замкнуты, и конденсатор С2 разряжен. Контакты реле релейного усилителя РУ-2 разомкнуты. При разворотах самолета возникает гироскопический момент, под действием которого гироскоп прецсссирует, и контакт К замыкается с одним-из боковых контактов, блокируя конденсатор С1, который начинает разряжаться через диод Д1 и обмотку реле РУ-1. Реле РУ-1 срабатывает, и его контакты размыкаются. При этом срабатывает реле РУ-2, и начинает разряжаться конденсатор С2 через резистор К.2. Реле РУ-2, срабатывая, замыкает цепь реле Р1. Реле Р1 включает исполнительное реле Р2, контакты которого отключают цепи коррекции, По окончании разворота самолета гироскопический момент исчезает, и гироскоп под действием магнитной пружины устанавливается в нейтральное положение. Контакт К размыкается, и конденсатор С1 начнет заряжаться. Система задержки времени, срабатывая, снимает питание с исполнительного реле Р2, контактами которого включаются цени коррекции.
При полете самолета, сопровождающемся колебаниями по курсу, контакт К замыкается на время, меньшее времени заряда конденсатора С1, поэтому реле Р2 не успевает срабатывать, и цепи коррекции не отключаются.